

ФГБОУ ВПО «Воронежский государственный технический университет»
Кафедра технологии машиностроения
- 2015
Методические указания
и варианты заданий
к выполнению контрольной работы № 1
по дисциплине
«Математическое моделирование
в машиностроении»
для студентов направления
15.03.05 «Конструкторско-технологическое обеспечение
машиностроительных производств»
заочной формы обучения
Воронеж 2015
Составитель канд. техн. наук А.В. Перова
УДК 519.868+621.01
Методические указания и варианты заданий к выполнению контрольной работы № 1 по дисциплине «Математическое моделирование в машиностроении» для студентов направления 15.03.05 «Конструкторско-технологическое обеспечение машиностроительных производств» заочной формы обучения / ФГБОУ ВПО «Воронежский государственный технический университет»; сост. А.В. Перова. Воронеж, 2015. 24 с.
Методические указания включают краткие теоретические сведения по целям и задачам дисциплины «Математическое моделирование в машиностроении», варианты, методику и порядок выполнения контрольной работы, снабжены перечнем рекомендуемой литературы и конкретными примерами моделирования с использованием статистических моделей.
Методические указания подготовлены в электронном виде в текстовом редакторе MS Word XP и содержатся в файле Контрольная работа№1_МММ.doc.
Табл. 6. Ил. 2. Библиогр.: 7 назв.
Рецензент д-р техн. наук, профессор Е.В. Смоленцев
Ответственный за выпуск зав. кафедрой, профессор
И.Т. Коптев
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
© ФГБОУ ВПО
«Воронежский государственный
технический университет», 2015
Цель и задачи дисциплины
Цель преподавания дисциплины - приобретение навыков разработки и использования математических моделей для описания, исследования и оптимизации процессов в машиностроении.
Задачи изучения дисциплины:
- ознакомление с общими понятиями математического моделирования процессов в машиностроении (структуры, классификации и областей применения математических моделей, предъявляемых к ним требований );
- освоение теоретических основ математического моделирования и оптимизации процессов в машиностроении;
- изучение вопросов математического моделирования физических процессов в технологических системах;
- освоение вопросов математического моделирования и оптимизации технологических станочных систем.
2. Общие понятия математического моделирования процессов в машиностроении
Под объектами моделирования в машиностроительном производстве следует понимать:
1. Технологические системы (ТС) – участки из универсальных станков, автоматические линии, гибкие производственные системы (ГПС).
2. Технологические процессы (ТП).
3. Физические процессы (ФП) – процессы, протекающие при резании металлов, при функционировании технологического оборудования в упругой системе СПИД и т.д.
В данном курсе рассматриваются математические модели технологических систем и физических процессов.
В чистом виде (по – отдельности) математические модели данных объектов применяются редко, как правило, они комбинированные. Например, в математических моделях ТС используются математические модели ТП, в которых, в свою очередь, применяются математические модели ФП.
Математическая модель объекта моделирования – это система математических элементов (чисел, переменных, уравнений, неравенств, множеств, матриц, графов и т.д.) и отношений между ними, адекватно отражающая некоторые свойства объекта, существенные с точки зрения инженера, для решения той или иной задачи.
Математические модели разрабатываются для:
1. Описания ФП, ТП, ТС.
2. Исследования ФП, ТП, ТС.
3. Проектирования ТП, ТС.
Оптимизации в ходе проектирования ТП, ТС и организации работы ТС.
Построения систем автоматизированного проектирования.
Вид, состав, сложность математической модели зависит от того, какой объект она описывает и для каких целей разработана.
Общие указания по выполнению контрольной работы
Объём и содержание контрольной работы соответствуют рабочей программе курса "Математическое моделирование в машиностроении". Контрольная работа содержит два задания. Номера вариантов заданий выбираются согласно двум последним цифрам шифра студенческого билета из таблицы 1.
4. Задание 1
Математическое моделирование поверхностного пластического деформирования поверхностей
тороидальным роликом
При поверхностном пластическом деформировании деталей, для получения требуемой шероховатости, необходимо обеспечить определенное давление в зоне контакта, которое известным образом [1] зависит от площади пятна контакта.
Цель задания — определить размеры ролика и угол его наклона для обеспечения требуемой площади пятна контакта при заданном натяге.
Таблица 1
Предпоследняя цифра Х соответствует номеру 1, 3, 5, 7, 9 |
Предпоследняя цифра Х соответствует номеру 0, 2, 4, 6, 8 |
Х0 – вариант 1 |
Х0 – вариант 11 |
Х1 – вариант 2 |
Х1 – вариант 12 |
Х2 – вариант 3 |
Х2 – вариант 13 |
Х3 – вариант 4 |
Х3 – вариант 14 |
Х4 – вариант 5 |
Х4 – вариант 15 |
Х5 – вариант 6 |
Х5 – вариант 16 |
Х6 – вариант 7 |
Х6 – вариант 17 |
Х7 – вариант 8 |
Х7 – вариант 18 |
Х8 – вариант 9 |
Х8 – вариант 19 |
Х9 – вариант 10 |
Х9 – вариант 20 |
Теоретические основы
При составлении расчетной схемы (рис. 1) принимаем, что ролик выполнен тороидальным из абсолютно жесткого материала. Обрабатываемая деталь абсолютно плоская и в момент контакта имеет абсолютную податливость. Площадь контакта рассчитываем в проекции на плоскость, параллельную обрабатываемой поверхности.
Для определения координат профиля пятна контакта при принятых упрощениях расчетные формулы имеют вид:
![]() ;
(1.1)
;
(1.1)
![]() ;
(1.2)
;
(1.2)
![]() ;
(1.3)
;
(1.3)
![]() ;
(1.4)
;
(1.4)
![]() ;
(1.5)
;
(1.5)
![]() ;
(1.6)
;
(1.6)
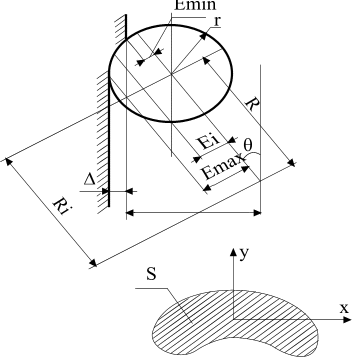
Рис. 1. Расчетная схема процесса поверхностного
пластического деформирования поверхности детали
![]() ,
(1.7)
,
(1.7)
где
![]() ,
,
![]() - параметры,
характеризующие расстояние от оси
симметрии тора до его крайних сечений,
контактирующих с плоскостью, мм;
- параметры,
характеризующие расстояние от оси
симметрии тора до его крайних сечений,
контактирующих с плоскостью, мм;
![]() -
радиус тора;
-
радиус тора;
![]() -
натяг, мм;
-
натяг, мм;
- угол наклона торового ролика к плоскости обработки, град;
n - число шагов интегрирования (не более 30);
![]() -
радиус от центра вращения до оси тора,
мм;
-
радиус от центра вращения до оси тора,
мм;
-
пересчетный параметр, определяющий
угловое расстояние от оси у
до места контакта торового круга в
сечении
![]() с плоскостью обработки, град.;
с плоскостью обработки, град.;
Ri - значение радиуса окружности при пересечении тора плоскостью на расстоянии Ei от оси симметрии, мм.
Площадь пятна контакта описывается системой параметрических уравнений (1.6 – 1.7), в которых параметром является расстояние от оси симметрии тора до секущей плоскости.
Методика расчета
Для
заданного значения натяга
![]() необходимо определить угол наклона
необходимо определить угол наклона
![]() ролика, обеспечивающего заданное
значение площади пятна контакта
ролика, обеспечивающего заданное
значение площади пятна контакта
![]() .
.
Для вычисления площади пятна контакта, описываемой уравнениями (1.6) и (1.7), используется метод трапеций. Площадь пятна контакта определяется по формуле:
![]() ,
(1.8)
,
(1.8)
где
![]() ,
,
![]() - определяются
по уравнениям
(1.6), (1.7);
- определяются
по уравнениям
(1.6), (1.7);
n - число шагов интегрирования или число участков, на которые разбивается площадь пятна контакта.
Изменяя
значение угла контакта ролика
![]() от
90° до
заданного
от
90° до
заданного
![]() с шагом
1° - 5°,
вычисляем площадь пятна контакта по
формулам
(1.1 - 1.8)
для каждого угла
от
90° до
с шагом
1° - 5°,
вычисляем площадь пятна контакта по
формулам
(1.1 - 1.8)
для каждого угла
от
90° до
![]() .
В результате получим зависимость площади
.
В результате получим зависимость площади
![]() от угла
.
Эту зависимость можно проиллюстрировать
графически (рис.
2).
от угла
.
Эту зависимость можно проиллюстрировать
графически (рис.
2).
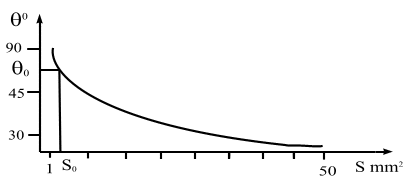
Рис. 2. График зависимости от
По
графику определяется угол
![]() ,
обеспечивающий
заданную площадь
пятна
контакта
,
обеспечивающий
заданную площадь
пятна
контакта
![]() .
.
Порядок выполнения задания 1
1. Составить алгоритм и программу расчета пятна контакта.
2.
Для своего варианта по табл.
2
определить значения
,
и
![]() .
.
3. Выбрать типоразмер ролика по табл. 2.
4. По вычисленным значениям для различных углов построить график (рис. 2).
5. По графику (рис. 2) определить значения угла , обеспечивавшего заданное значение .
6.
Если
![]() ,
то необходимо взять другой типоразмер
ролика и повторить расчеты.
,
то необходимо взять другой типоразмер
ролика и повторить расчеты.
Таблица 2
№ варианта |
|
, мм |
, мм2 |
1 |
60 |
0,05 |
2,50 |
2 |
50 |
0,07 |
3,50 |
3 |
45 |
0,08 |
4,10 |
4 |
55 |
0,05 |
2,60 |
5 |
70 |
0,06 |
2,95 |
6 |
55 |
0,15 |
7,67 |
7 |
40 |
0,03 |
1,65 |
8 |
65 |
0,06 |
3,00
|
9 |
45 |
0,14 |
7,30 |
10 |
50 |
0,10 |
5,25
|
11 |
40 |
0,10 |
5,00 |
12 |
45 |
0,03 |
1,55 |
13 |
50 |
0,01 |
0,5 |
14 |
60 |
0,05 |
2,1 |
15 |
50 |
0,02 |
1,6 |
16 |
45 |
0,07 |
3,9 |
17 |
55 |
0,16 |
7,2 |
18 |
40 |
0,2 |
1,6 |
19 |
70 |
0,05 |
3,1 |
20 |
65 |
0,07 |
3,3 |
Содержание отчета
1. Алгоритм и программа расчета.
2. Номер варианта задания и исходные значения параметров.
3. Вариант типоразмера ролика.
4.
Вычисленные значения
и
при выбранном числе
![]() .
.
5. График зависимости от .
6. Найденное значение параметра .
Таблица 3
Параметры, мм |
Тип ролика |
|||||
1 |
2 |
3 |
4 |
5 |
6 |
|
R |
25 |
30 |
20 |
34 |
25 |
33 |
r |
4 |
5 |
3 |
6 |
5 |
4 |
