

Задания
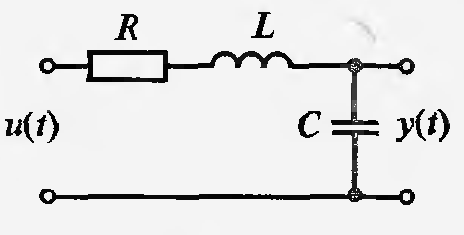
I. Дана цепь. Выбрать в качестве координат состояния x1 – ток в цепи, x2 – напряжение на конденсаторе.
Записать уравнение, описывающее переходные процессы в цепи.
Записать математическую модель в переменных состояния (форма Коши)
Записать матричную форму полученного уравнения.
Переходные процессы в этой цепи описываются уравнением
![]()
Если в качестве координат состояния
выбрать
![]() - ток в цепи и
- ток в цепи и
![]() - напряжение на конденсаторе, то
математическая модель процесса в цепи
будет иметь вид:
- напряжение на конденсаторе, то
математическая модель процесса в цепи
будет иметь вид:
![]()
![]()
Записать данную систему в матричной форме и записать матрицы внутренней моделей системы.
II. С помощью функции ss получите модель в переменных состояниях для систем, имеющих в разомкнутом состоянии следующие передаточные функции:
![]()
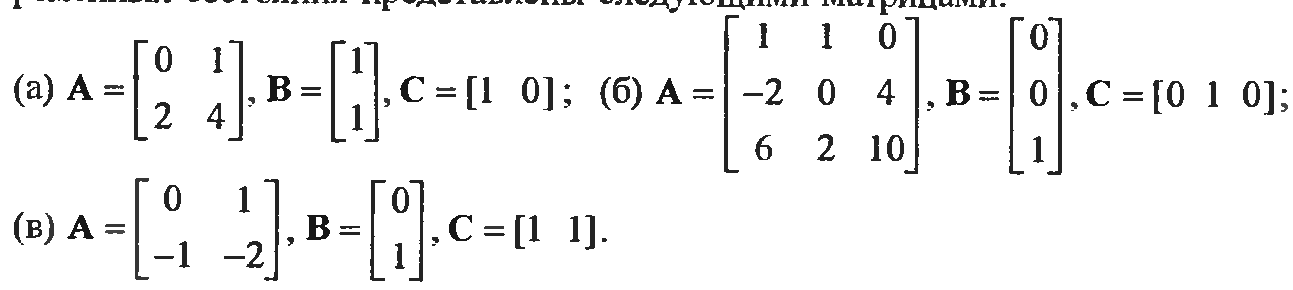
III. С помощью функций tf определите передаточные функции для систем, модели которых в передаточных состояниях представлены следующими матрицами
Лабораторная работа №3 Соединение звеньев lti-объекта
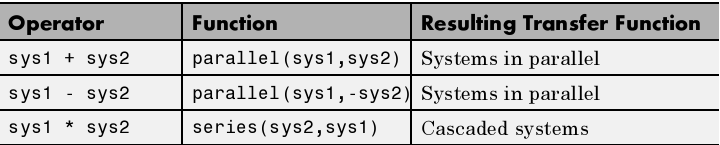
Обычно система регулирования состоит из ряда подсистем (звеньев, каждое из которых имеет свою входную и выходную величину) как-то: объект регулирования (обычно на SISO-схемах он обозначается как plant или G, датчики или сенсоры (H), регулятор (C), фильтры (F) и др. Каждая из этих подсистем описывается одним из четырех рассмотренных выше типов. Для получения модели всей системы их нужно соединить между собой в соответствии с общей схемой. Для этой цели в CONTROL SYSTEM TOOLBOX предусмотрен ряд команд см. табл.3.1.
Таблица 3.1
Некоторые функции соединения звеньев
Приведем пример на параллельное соединение звеньев заданных в виде отношения двух полиномов (tf)
![]()
Команда series осуществляет последовательное соединение двух систем. Ее синтаксис
sys=series(sys1,sys2)
или sys=series(sys1,sys2,outputs1,inputs2)
В первом случае эта команда равносильна умножению систем: sys = sys1*sys2. Размерности выхода первой системы и входа второй должны быть одинаковы.
Вторая команда реализует более общий случай, когда часть выходов первой системы и часть входов второй могут быть задействованы отдельно (рис. 3.1). Тогда outputs1 — вектор номеров (индексов) выходов первой системы, которые должны быть подсоединены к номерам (индексам) входов второй системы, указанным в векторе inputs2 (например, outputs1 = [1,2], inputs2 = [1 3], если выходы 1 и 2 первой системы должны быть соединены со входами 1 и 3 второй системы). Размерности обоих векторов должны быть одинаковы.
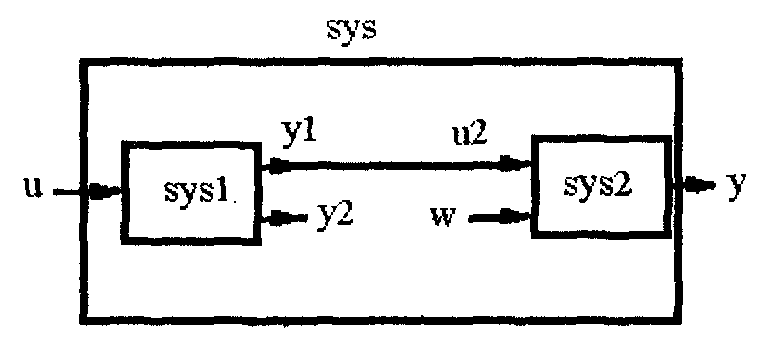
Рис. 3.1. Пояснение к команде series
Примеры на использование команды series
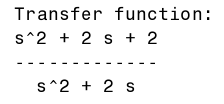
Пусть дан объект управления задан передаточной функцией G(S)=1/500s2, а регулятор имеет передаточную функцию Gc(S)=(s+1)/(s+2). На рис. 3.2 последовательное соединение двух систем с передаточными функциями G1(S) и G2(S), а так же проиллюстрирован смысл функции series, а на рис. 3.3. показано, как с ее помощью определяется произведение G(S) Gc(S). Результирующая функция имеет вид
![]() ,
,
где sys – обозначение LTI-объекта

Рис. 3.2. Структурная схема
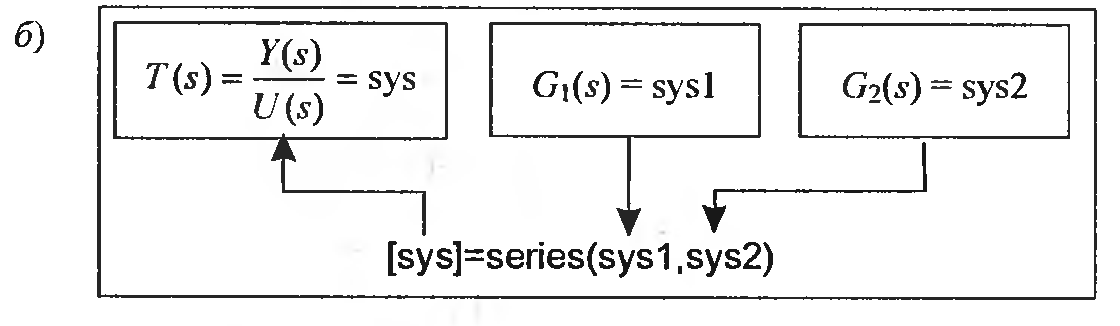
Рис. 3.3. Функция series

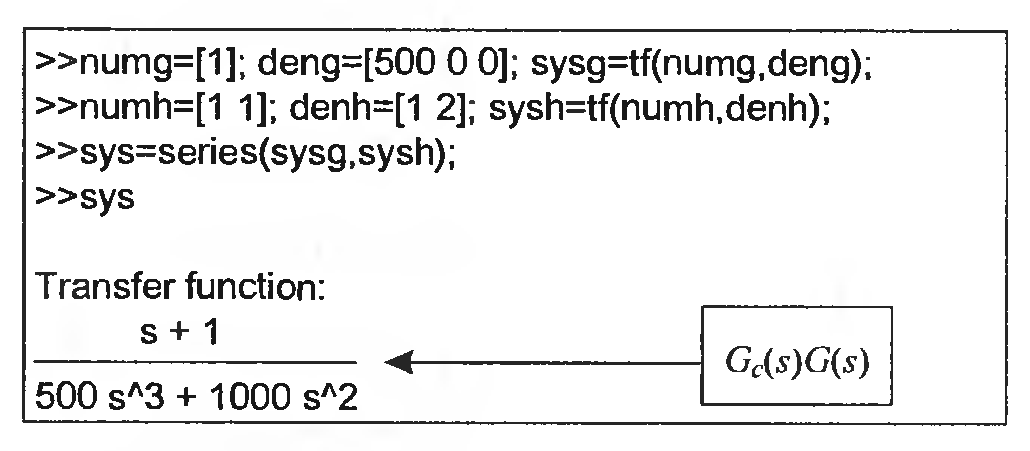
Рис. 3.4. Применение функции series
Команда раrаllel осуществляет параллельное соединение двух систем. Ее синтаксис
sys=раrаllel(sys1,sys2)
или sys=parallel(sys1,sys2,inp1,inp2,out1,out2).
В первом случае эта команда равносильна сложению систем. Входы соединяются между собой и на них подаются одинаковые сигналы, а выходы суммируются. Во втором случае inp1 и inp2 - векторы, содержащие индексы входов первой и второй систем, соединяемых между собой, а out1 и out2 векторы, содержащие индексы выходов, которые суммируются друг с другом (рис. 3.5.).

Рис. 3.5. Пояснение к команде parallel.
Пусть, например, каждая система имеет по три входа и по четыре выхода, и мы хотим, чтобы на вход I первой системы и вход 2 второй подавался один и тот же сигнал, и то же самое относительно входов 2 и 3. Далее мы хотим, чтобы первые выходы систем суммировались друг с другом, и то же самое относительно вторых входов. Тогда команда запишется так:
sys=parallel(sys1,sys2, [1 2], [2 3], [1 2], [1 2])
Теперь рассмотрим синтаксис команды feedback реализующую обратную связь в системе. Выполним вначале пример организации обратной связи для звеньев заданных в виде отношения двух полиномов (tf)
![]()

По команде, общий вид которой
sys=feedback(sys1,sys2,feedin,feedout,sign)
строится система с sys1 в прямой связи и sys2 в обратной, причем знак обратной связи +1 или -I определяется полем sign. Без указания знака система имеет отрицательную обратную связь см. рис. 3.6.
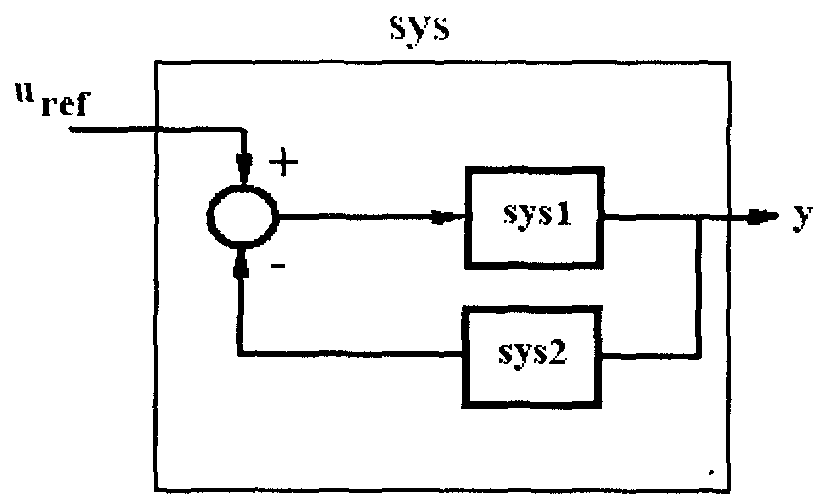
Рис.3.6. К команде feedback
Обе системы должны быть либо непрерывные, либо дискретные с одинаковыми периодами квантования. Третье и четвертое поля команды используются в тех случаях, когда на регулятор подается только часть выходов первой системы, и для управления (выход регулятора) также используется только часть входов объекта. Тогда feedout — вектор номеров (индексов) выходов объекта и feedin — вектор индексов входа объекта, участвующих в организации обратной связи. Размерность этих векторов должна быть равна размерностям входа и выхода регулятора соответственно. Часто встречаются случай, когда замкнутая система имеет единичную обратную связь (рис. 3.7).
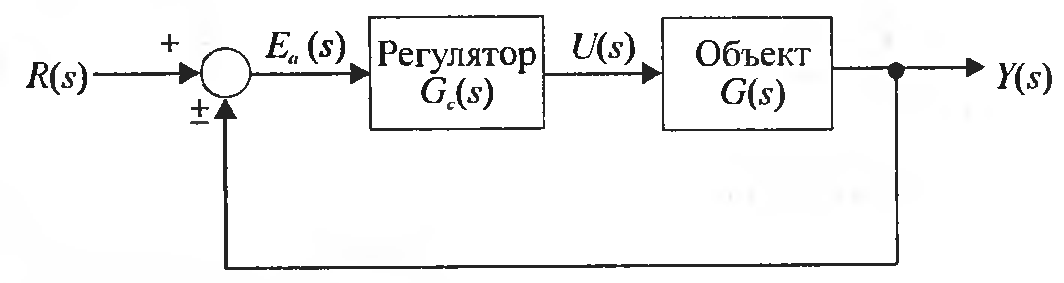
Рис. 3.7. Система управления с единичной обратной связью

Рис. 3.8. Структурная схема
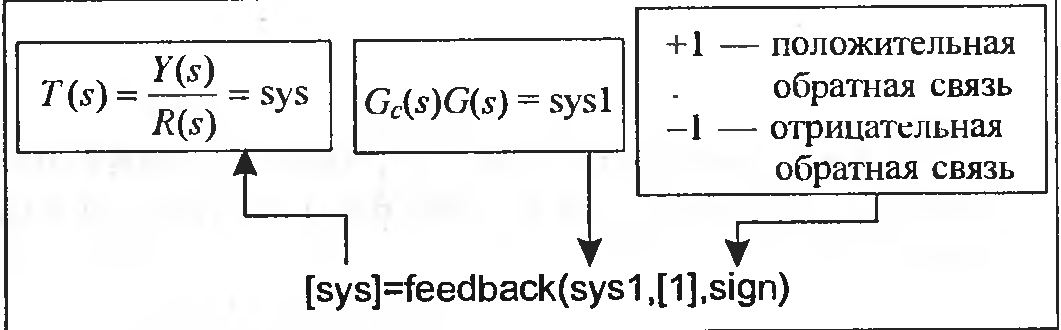
Рис. 3.9. Применение feedback в случае
единичной обратной связи
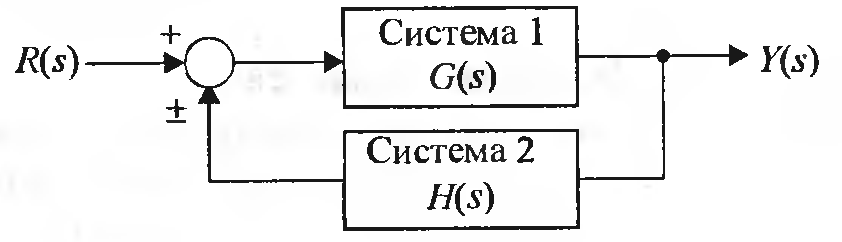
Рис. 3.10. Структурная схема
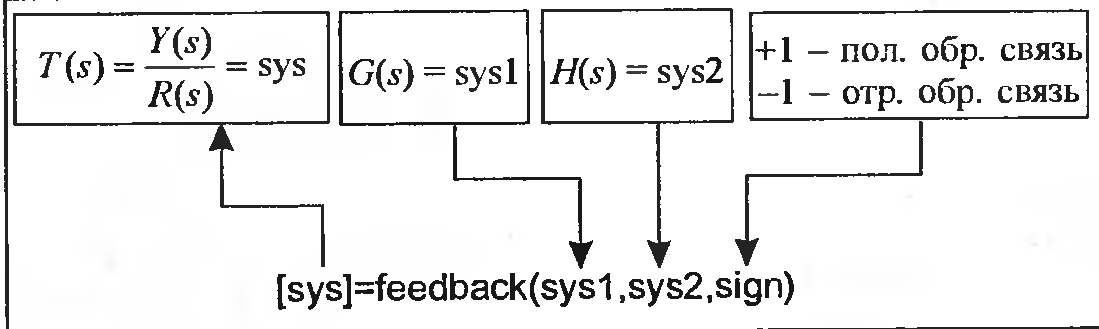
Рис. 3.11. Функция feedback
Пусть объект и регулятор имеют, соответственно, передаточные функции G(S) и H(S). Для определения передаточной функции замкнутой системы воспользуемся функцией feedback. В результате получим
![]()
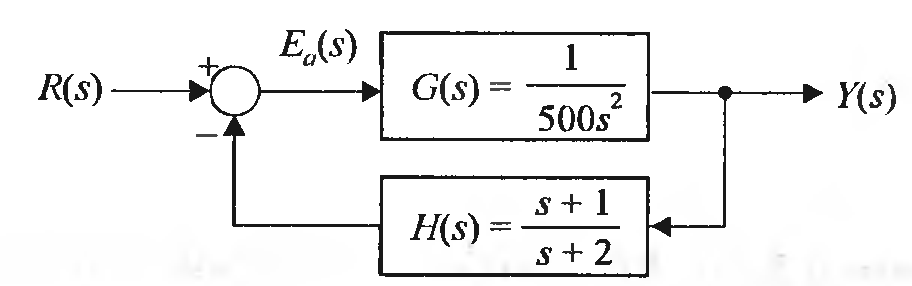
Рис. 3.12. Структурная схема
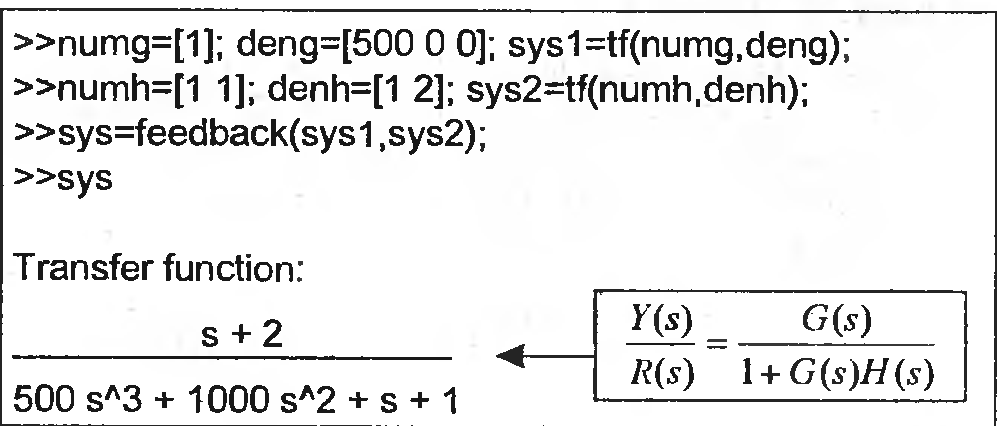
Рис. 3.13.Скрипт MATLAB