

вертикальный взлет, натягивание троса-кабеля, плавный отрыв ГДК от земли;
ВЕТЕ»
-
Рис.
2. Планшет
района
работ (масштаб
1:50000)
с сеткой гиперболических координат
•
-РЯДОВОЙ
ПРОЕКТНЫЙ А
- РЯДОВОЙ ФАКТИЧЕСКИЙ □
-КОНТРОЛЬНЫЙ
®
- ОПОРНЫЙ пинит
ОКЕМА






![]()
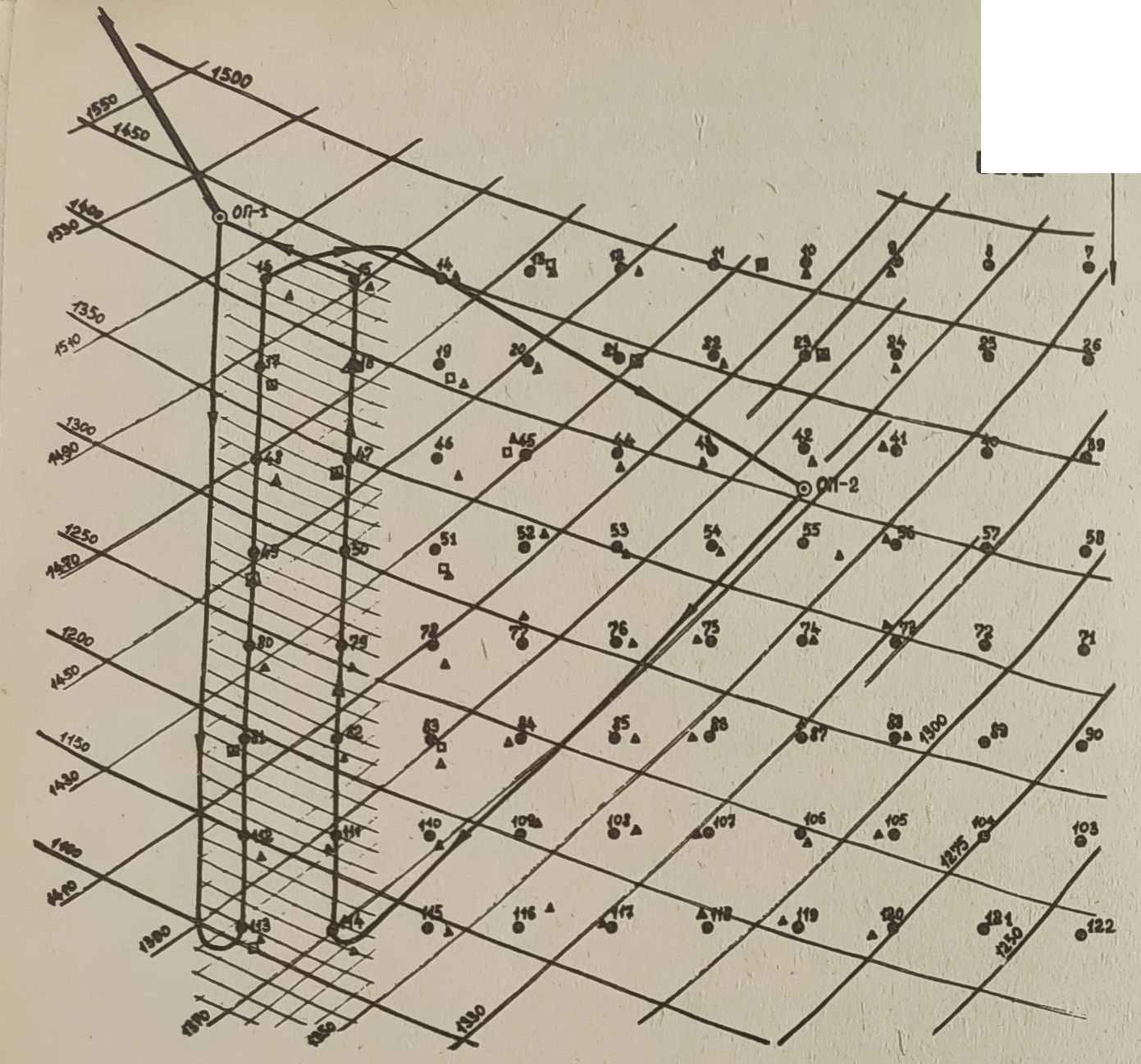
Пункты наблюдений
Грявиметрического рейса
горизонтальный полет на ОП с помощью РГС "Поиск" или визуально;
торможение, гашение раскачки подвески, зависание над ОП и установка ГДК на дно моря;
висение над ГДК (буем) по изображению на экране ПТУ-30 и командам бортоператора (брртмеханика) для снятия показаний ГДК; .
подъем ГДК, переход в горизонтальный полет с обязательным пролетом над ОП для фиксирования начала от - счета РГС "Поиск";
горизонтальный полет на РПН по РГС 'Поиск'" по заранее рассчитанному курсу;
взятие отсчета на РПН, который проводится по методике, аналогичной взятию отсчета на ОП с последующим полетом на очерёдной РПН.
Взятие отсчета на ОП проводится в начале рабо -
ТЫ» после взятия шести последовательных отсчетов на РПН и в слунПе прекращения полета по каким-либо причинам.
■ ''/JB программу полетов каждого рабочего дня должно входить взятие отсчетов на одном-двух пунктах из предыдущих полетов для внешнего контроля.
. 5.3. Оценку качества съемки необходимо проводить со
гласно 'Инструкции по гравиметрической разведке", М.» "Недра", 1975 (§ 90-92, § 211-212).
^М5.4. Методика выполнения полетов.
Полеты с ГДК на внешней подвеске разрешают- с я при следующих метеоусловиях: облачность до 10 баллов
высотой 300 м, видимость не менее 3 км, ветер до 15 м/с, отсутствие болтанки.
Полеты необходимо выполнять в соответствии с
| Руководством по летной эксплуатации вертолета Ми-8" (М., "Воздушный транспорт, 1980) и требованиями настоящей инструкции.
Полетная масса вертолета при полетах над морем должна обеспечивать горизонтальный полет вертолета
на одном двигателе при наивыгоднейшей скорости полета
ИИ20 км/ч по прибору. Определить массу можно по номо- грамме действующего "Руководства по летной эксплуатации вертолета Ми-8" (п. 3.1, лист 10).
Подъем ГДК с земли осуществлять путем верти
кального набора высоты с контролем по РВ-3. По комаь- де бортоператора "трос натягивается* замедлить
вертикальную скорость набора высоты и плавно оторвать ГДК от земли. После подъема ГДК от земли на расстояние не менее 3 м плавно, с набором высоты, произвести разгон скорости до 120 км/ч.
После набора высоты 100 м взять курс на ОП и
установить скорость 120-140 км/ч. После информации бортоператора о нормальной работе РГС "Поиск* выход
на ОП осуществить визуально или по команде штурмана на основании цифровых данных РГС 'Поиск*.
По команде штурмана "до точки 500 м* произ -
врдить плавное гашение скорости из расчета зависания на высоте 50-60 м. Зависание выполнить с разворотом против ветра или при ветре слева до 60°.
esc
£
-»l
caps
loc
t
Ctrl
|
района
работ (масштаб
Пункты
наблюдений
•
-РЯДОВОЙ
ПРОЕКТНЫЙ л-рядовой
Фактический □
-
КОНТРОЛЬНЫЙ ®
-
ОПОРНЫЙ ПУНКТ
снемп
Рис,
2,
Планшет 1
$@0000)
с сеткой гиперболических коорд0йаТ![]()
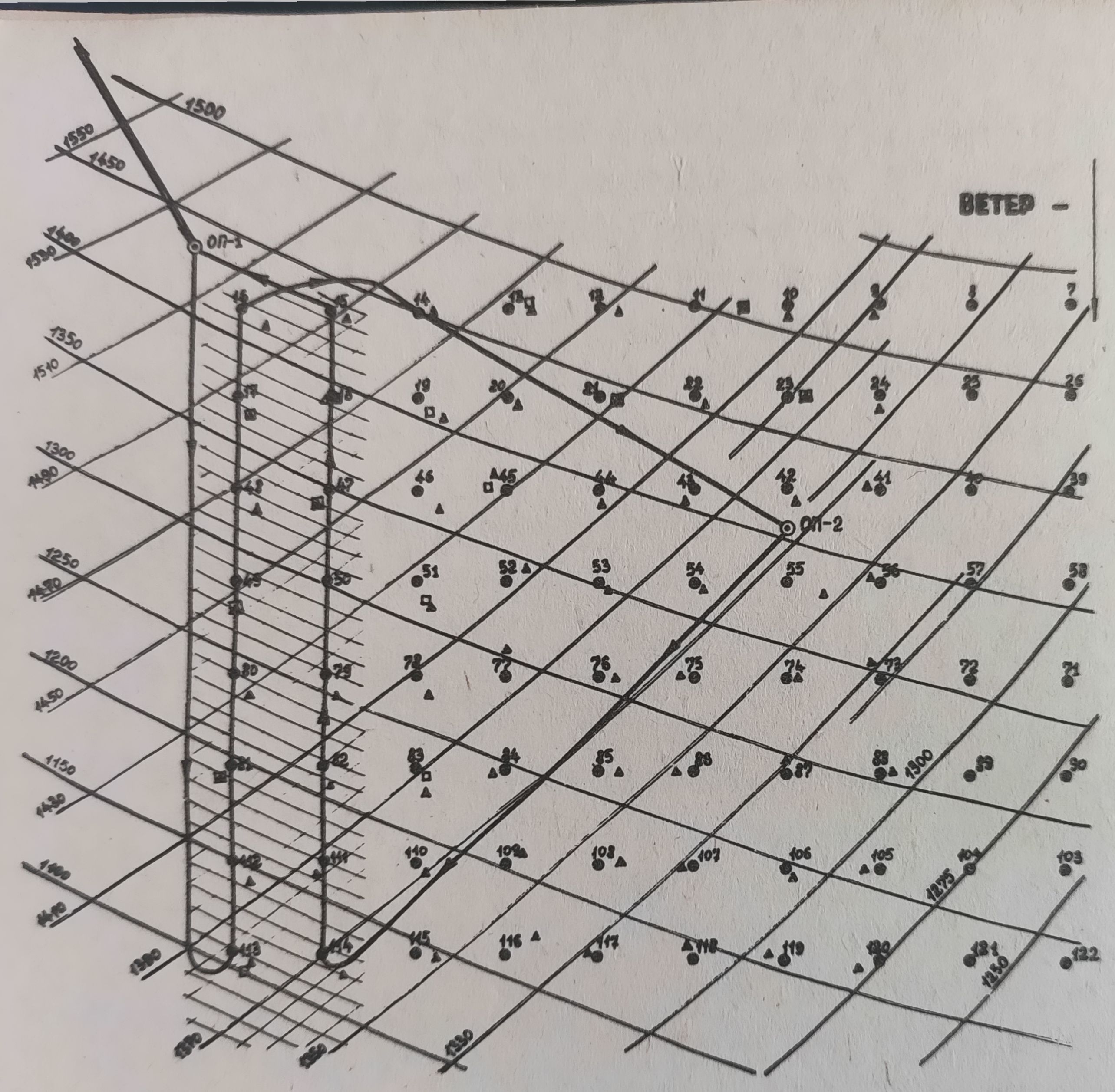






Гравиметрического рейса
- горизонтальный полет на ОП с помощью РГС 'По0СК
ЪГТТТЯГ nTJfotrerrt »»
После фиксации висения по команде бортоператора выполнить вертикальное снижение с контролем по РВ-3 и ДИВ—1. После команды бортоператора '‘'контакт" (ГДК коснулся водной поверхности) следует уменьшить скорость вертикального снижения до 0,2-0,3 м/с. Висение выполнять на высоте 15-20 м по РВ-3 с удержанием изображения буя в пределах экрана с корректировкой бортоператора, который непрерывно информирует командира о точности висения.
Подъем гравиметра осуществлять после команд бортоператора ГДК "отсчет взят", "подъем*. По этим командам плавно1 по вертикали поднять ГДК и, набрав высоту 80—100 м (бортоператор подает команды "ГДК вышел* "можно в разгон"), совершить разворот с таким расче- том,гчтобы пройти над ОП с курсом на первый РПН гравиметрической съемки. При проходе над ОП командир вертолета подает сигнал бортоператору РГС "Поиск", который начинает выводить вертолет в расчетную точку РПН.
Вывод вертолета на РПН по РГС "Поиск" и взятие отсчета возможны только при условии четкого взаи — модействия всех членов экипажа.
Обязанности распределяются следующим образом:
командир вертолета - пилотирование по командам штурмана и бортинженера;
2-й пилот - контроль за приборами, пилотирование по указанию командира вертолета, ведение внешней связи согласно плану связи;
бортоператор-бортмеханик (рабочее место у сдвижной входной двери) - наблюдение за подвеской, информирова - ние командира о касании гравиметром и контрольным буем водной поверхности, информирование об установке грави - метра на дно, корректировка висения с ослабленным тро - сом-кабелем, информирование о выходе гравиметра при подъеме;
штурман (рабочее место в кабине на месте бортоператора-бортмеханика) - непрерывная, быстрая и четкая переработка цифровой информации бортоператора РГО "Поиск" в определении местоположения вертолета^ вы да-
ча командиру вертолета поправок по курсу, скорости и своевременная, не позднее чем за 500 м до точки, информация командиру 'до точки 500 метров' и так далее;
бортоператор РГС 'Поиск' (рабочее место у пульта РГС 'Поиск') — выдача цифровой информации штурману;
бортоператор ГДК (рабочее место у пульта ГДК) информирование о работе ГДК, взятии отсчета и передача команды на подъем.
фПр им ечание. Все члены экипажа, в том числе бортоператор РГС 'Поиск' и бортоператор ГДК, должны иметь связь по СПУ.
В связи с кратковременностью полета между - точками съемки ( s 2,5 км) основными требованиями к информации, передаваемой оператором РГС 'Поиск", являются точность, непрерывность и своевременность. Штурман обязан учитывать меняющийся в полете в связи с изменением у Пр. угол сноса и на основании цифровой информации бортоператора РГС 'Поиск' своевременно давать поправку по курсу, а также команду на гашение скорости. При выходе вертолета в заданную точку с точностью 100—150 м штурман может давать направление не по курсу, а командами на комбинированное смещение ('влево—вперед', 'влево-назад', 'вправо-вперед', 'вправо- назад'), На этом участке работы главная задача штурмана состоит в том, чтобы не допустить пролет точки, так Ф как смещение назад сопряжено с трудностями пилотиро -
вания. Если вертолет пролетел точку более чем на 100-150 м, целесообразно выполнить повторный заход.
Члены экипажа должны применять следующие команды:
— бортоператор РГС 'Поиск" сообщает штурману с частотой не реже 5-7 с две последних цифры координат, например: '90', '59*$
штурман — командиру вертолета; 'курс 190', 'так держать', 'до точки 700 , 500 , 300, 200 м*, 'подходим
бортоператор (бортмеханик) - командиру: "ГДК кос - нулей воды", "буй коснулся", "ГДК на дне", "так висеть" "влево", "вперед-вправо 3, 5, 7 и т.д.", "не терять высоту", "вверх 2, 3", "вниз 2, 3", "отсчет взят, подъем", "трос натянут", "ГДК вышел", "можно в разгон ';
второй пилот — командиру: "приборы в норме", "оста — ток топлива — тысяча" и т.д. в перерывах между инфор - мадией других членов экипажа;
бортоператор ГДК — командиру: "отсчет взят", "подъем", "отсчет не берется", "поднять и опустить".
5.4.12. Подъем ГДК осуществлять после команд бортоператора ГДК: "отсчет взят", "подъем". По этой команде плавно путем вертикального набора высоты поднять ГДК и после его выхода из воды на высоту не менее 3 м произвести разгон скорости с одновременным набором высоты, Набрав высоту 100 м, выйти по команде штурмана на расчетный курс для полета на следующий РПН.
5.5. Руководство съемочными полетами на данном виде работ необходимо осуществлять согласно разделу 15 "Руководства по съемочным полетам", учитывая специфику ведения связи и управления воздушным движением при полетах на малых высотах в конкретном районе работ.
8. Техника безопасности
Запрещается притрагиваться к гравиметру до его установки на землю во избежание воздействия статичес - кого электричества.
Экипаж и бортоператоры ГДК,РГС "Поиск" должны быть обеспечены плавсредствами.
В аварийной ситуации руководствоваться п. 6.18 действующего "Руководства по летной эксплуатации вер - толета Ми-8"