

Экзамен по нелинейной части (Ильин)
.pdfБилет №1
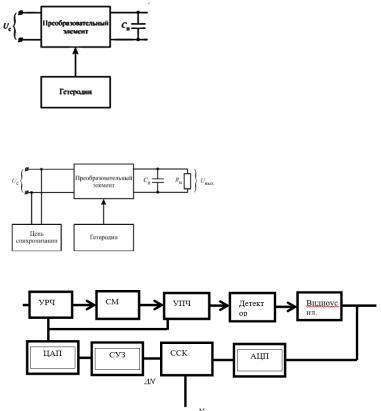
1. Общая теория преобразователя частоты.
Представим смеситель ПЧ как нелинейный шестиполюсник, на выходе которого включена избирательная нагрузка н, настроенная на промежуточную частоту. На нелинейный элемент действуют три гармонических напряжений:
Напряжение сигнала: = cos( + ) Напряжение гетеродина: г = г cos( г + г)
Напряжение промежуточной частоты: пр = пр cos( пр + пр) Ток на выходе смесителя является функцией трех переменных:
Выражение для выходного тока можно представить в виде разложения в ряд Тейлора в точке, задаваемой мгновенными значениями напряжения сигнала, и сигнала на промежуточной
частоте:
Подставим все и применим правило перемножения косинусов:
Первое слагаемое: Действие напряжение гетеродина; Второе слагаемое: Мгновенное значение прямой проводимости;
Третье слагаемое: Мгновенное значение выходной проводимости; Следовательно, можно записать:
 Получим уравнение прямого преобразования, подставив во 2-сл k=1, а в 3-сл k=0: Представим слагаемые рядом Фурье:
Получим уравнение прямого преобразования, подставив во 2-сл k=1, а в 3-сл k=0: Представим слагаемые рядом Фурье:
В комплексном виде это уравнение запишется в виде:
Прямое преобразование – это фактически образование промежуточной частоты из частоты сигнала и частоты
гетеродина. Кроме прямого преобразования в преобразователях частоты имеет место и обратное преобразова-
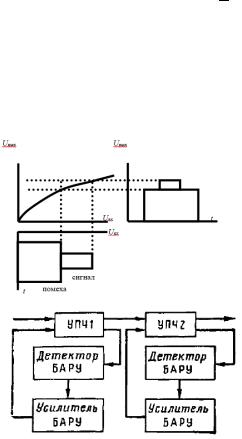
2. Прямая АРУ
Цепь АРУ подключена ко входу регулируемого усилителя, напряжение регулировки Eрег получается в результате детектирования входного напряжения. При увеличении Uвх напряжение на выходе детектора АРУ возрастет, Eрег тоже возрастет и коэффициент усиления уменьшится.
Прямая АРУ позволяет в принципе получить идеальную характеристику регулировки Uвых = const при Uвых > Uвыхmin, но практически добиться этого не удается. Такой АРУ свойствен ряд недостатков, основной из которых состоит в необходимости включать перед детектором в цепи АРУ дополнительный усилитель с большим коэффициентом усиления. Прямая АРУ нестабильна, т.е. подвержена действию различных дестабилизирующих факторов.
Кроме того, цепь АРУ находится под воздействием сигнала с широким динамическим диапазоном, т.е. подвержена перегрузкам и должна содержать внутренние обратные связи. В этом случае система АРУ практически превращается в отдельный канал приемного устройства, не менее сложный, чем основной канал. Все эти причины приводят к тому, что в настоящее время большое распространение получили обратные системы АРУ.
Билет №2
1.Работа диодного детектора в режиме «сильного» сигнала
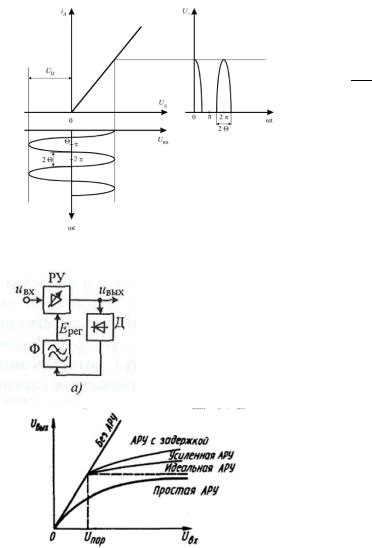
Вслучае детектирования сильных сигналов Um > 0,7 ÷ 0,8, детекторную характеристику можно представить в виде кусочно-линейной функции. В этом случае процесс детектирования можно пояснить с помощью эпюр напряжения.
Если на детектор подается АМ–сигнал, а сам детектор линеен и безынерционен по отношению к огибающей, то можно вывести выражение UΩ = U0m cos θ. С учетом этого коэффициент передачи амплитудного детектора при детектировании АМ–колебания определяется выраже-
нием: K = UΩ = cos θ.
mU0
Таким образом, идеальный безынерционный детектор не создает нелинейных искажений огибающей, так как его коэффициент передачи постоянен и равен cos . Это дает основание называть детектор сильных сигналов линейным детектором. Величина коэффициента передачи детектора может быть очень близкой к единице при достаточно большом произведении S ∙ R (S – крутизна диодной характеристики, R – нагрузка детектора). Это приводит к тому, что в современных приемниках применяют, как правило, режим детектирования сильных сигналов.
2. Обратная АРУ
Цепь АРУ подключена ко выходу регулируемого усилителя, напряжение регулировки Eрег получается в результате детектирования выходного напряжения. Фильтр АРУ отфильтровывает составляющие частот модуляции и пропускает медленно меняющееся составлявшие Eрег
Достоинства обратной регулировки: такая система АРУ не подвержена сильным перегрузкам и нечувствительна к изменениям коэффициента усиления системы, связанных со старением активных элементов.
Недостаток обратной регулировки: невозможность получения идеальной характеристики АРУ и невозможность получения одновременно большой глубины регулирования и высокого быстродействия.
Билет №3
1. Работа диодного детектора в режиме «слабого» сигнала При детектировании слабых сигналов диод работает без отсечки тока. Рабочий участок детектирования находится в пределах криволинейной части статической характеристики диода.
Для случая детектирования слабых сигналов получено выражение для уравнения детекторной характеристики в следующем виде:
|
1 f″(Uп) |
R |
н |
||
|
4 f′(Uп) |
||||
|
|
||||
U = I ∙ Rн = |
|
|
|
|
Uc2 = A ∙ Uc2 |
1 |
|
|
|
||
|
+ Rн |
||||
|
f′(Uп) |
||||
Из последнего выражения следует, что детекторная характеристика диодного детектора при слабых сигналах имеет вид квадратичной параболы. Поэтому диодные детекторы слабых сигналов часто называют квадратичными.
Квадратичность детекторной характеристики приводит к значительным нелинейным искажениям АМ–сигнала. Для этого случая коэффициент нелинейных искажений может быть определен по следующей формуле: Ки = m4
Дополнительными недостатками квадратичного амплитудного детектора являются низкий коэффициент передачи К = Uвых⁄Uc,
Поскольку допустимый коэффициент искажений в радиовещании не превышает менее 5%, то это налагает ограничения на допустимую глубину АМ–колебания в передатчике (m < 20%). При этом очень непроизводительно расходуется мощность передатчика, вкладываемая в несущее колебание. В этом состоит главная причина, по которой детектирование слабых сигналов не применяется в современных связных и радиовещательных приемниках.
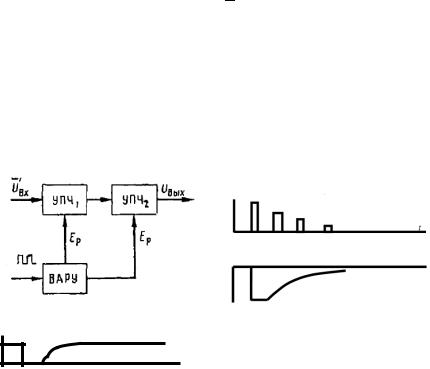
2. Быстродействующая АРУ
Быстродействующие АРУ применяется в радиолокационных приемниках и является эффективным средством борьбы с помехами, длительность которых превышает длительность сигнального импульса.
Как видно из представленных графиков за счет системы АРУ повышается отношение сигнал/помеха, так как усиление сигнала происходит на линейном участке амплитудной характеристики приемника.
Выход каждого УК УПЧ поступает к детектору АРУ и через УПТ вырабатывает напряжение Eрег, смещающее рабочую точку транзистора УК влево. Благодаря этому усилитель не перегружается, и информация об импульсном сигнале не теряется.
Отличительная особенность БАРУ – высокая скорость ее срабатывания при мощной помехе; цепь БАРУ инерционна для сигнала и срабатывает только от помехи. Постоянная времени фильтра БАРУ во много раз меньше постоянной времени фильтра АРУ.
Билет №4
1. Диодные преобразователи частоты
Для диода справедливо S = 1⁄Ri = Gi , следовательно уравнения преобразования примут вид:
Gп = G0 = Giп = S0, где Gп, G0 – это входная проводимость преобразователя; Giп – внутренняя проводимость преобразователя
Sобр = Gобр = Sп = S0 , где Sп − это крутизна преобразования
2 2
Следовательно коэффициенты передачи диодного преобразователя можно представить следующим образом:
Kп = − |
SпZп |
= −SZн |
Kобр = − |
SпZc |
= −SZс |
|
|
|
|
|
|
||||
|
1 + S0Zп |
|
1 + S0Zc |
|
|
||
Таким образом, в диодных преобразователях внутренние параметры прямого и обратного преобразования равны, а коэффициенты |
прямого |
и |
|||||
обратного преобразования отличаются только из-за разницы Zн и Zс. |
|
|
|||||
Рассмотрим диодный смеситель: |
|
|
|
|
|||
Он применяется в диапазоне ВЧ и СВЧ. Диод в качестве нелинейного элемента обладает малой малой инерционностью и сравнительно малыми шумами. Диодные смесители рассчитаны на работу со слабыми сигналами и обладают высокой эффективностью преобразования. К недостаткам можно отнести отсутствие усилительных свойств.
Коэффициент преобразования диодного смесителя увеличивается при увеличении амплитуды сигнала гетеродина. Сопротивление источника сигнала и нагрузки при этом должны быть уменьшены.
Рассмотрим балансный смеситель
Он используются в диапазоне СМ и ММ волн. Отличительным свойством БС является то, что при приеме слабых сигналов он способен в значительной степени подавлять шумы гетеродина. Шумы гетеродина поступают на диоды VD1 и VD2 в противофазе, а за тем в противофазе подаются на выходной трансформатор смесителя. Поэтому при высокой симметрии плеч преобразователя шумовой сигнал от гетеродина будет близок к нулевому уровню
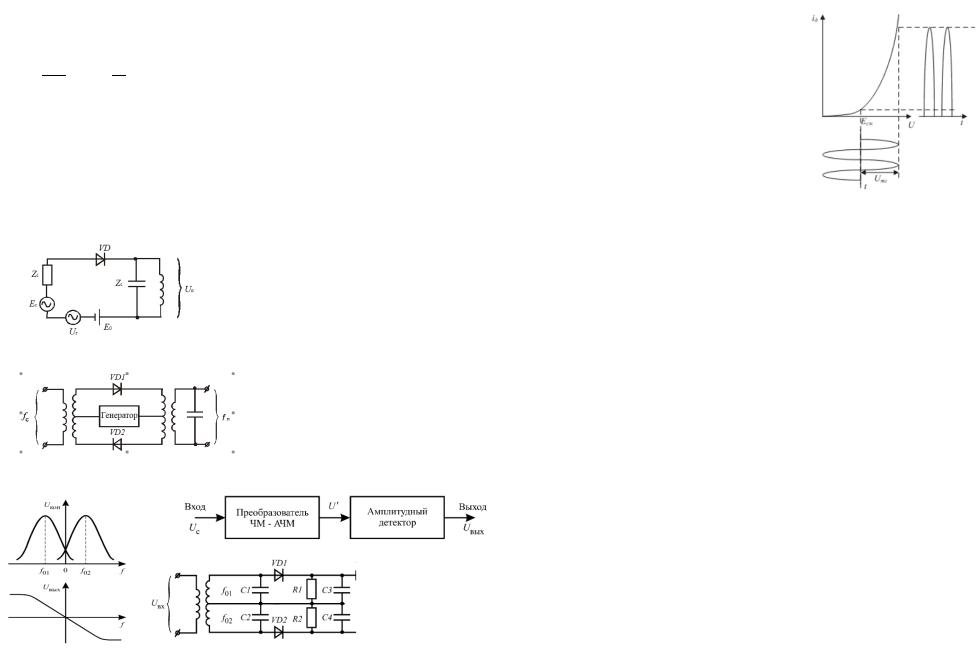
2. Частотные детекторы с амплитудным преобразованием частоты модуляции
При реализации таких частотных детекторов применяется преобразование ЧМ напряжения в АЧМ колебание с последующим амплитудным детектированием преобразованного напряжения.
В качестве детектор с преобразователем ЧМ–АЧМ может служить колебательный контур. АЧХ одного КК не обеспечивает высокой линейностью и крутизной детекторной характеристики, поэтому в системах с широкополосной ЧМ и в системах автоматической подстройкой частоты используются балансные ЧД с двумя рас-
строенными контурами.
Контура ЧД настроены на частоты f1 и f2, расположенные симметрично по обе стороны от центральной частоты 0 = с
При возрастании частота сигнала приближается к резонансной частоте первого контура f1, и удаляется от частоты настройки второго контура f2. Напряжение на первом контуре увеличивается, а на втором уменьшается. При понижении частота сигнала приближается к f2, и удаляется от f1, увеличивается напряжение на втором контуре и уменьшается на первом.
Сигнал с частотной модуляцией, становиться АЧМ. Выходное напряжение частотного детектора формируется как разность выпрямленных напряжений детекторов. За счет этого возрастает крутизна частотного детектора и повышается линейность детекторной характеристики.

Билет №5
1.Синхронный амплитудный детектор.
Всинхронных детекторах под воздействием гетеродина периодически во времени меняются параметры цепи. Поскольку к таким устройствам относятся ПЧ, то структурная схема СД совпадает со структурной схемой ПЧ. Отличие СД от ПЧ заключается в том, что что частоту гетеродина выбирают равной частоте несущего колебания на входе детектора и, таким образом, реализуется нулевая промежуточная частота. Т.е гетеродин должен быть синхронным с сигналом. г =
с, вых =
Ток на выходе синхронного детектора имеет вид:
вых0 = 0,5 ∙ 1 ∙ ∙ ( г − с)
Выходное напряжение:
вых = вых0 ∙ н = 0,5 ∙ 1 ∙ ∙ н ∙ ( г − с)
Для реализации синхронности и синфазности гетеродина создается специальная цепь синхронизации, включающая в себя фильтр для выделения несущего колебания Uс, которое подводится к фазовому детектору системы автоматической подстройки частоты гетеродина.
Достоинства: линейность амплитудной характеристик, начиная с очень слабых сигналов; частотная избирательность осуществляется за счет изменения параметров выходного фильтра
2. Системы АПЧ. Виды АПЧ. Достоинства и недостатки.
Системами АПЧ называется цепи, которые в результате нестабильности частоты передатчика и гетеродина приводят уменьшают требуемую полосу частот.
Различают два вида АПЧ:
1.ЧАПЧ. В этой системе признаком является отклонение частоты сигнала от переходной частоты частотного детектора.
2.ФАПЧ. В этой системе признаком является отличие фазы колебаний сигнала от фазы опорного колебания.
Особенностью системы ЧАПЧ является наличие статической ошибки регулирования по частоте, т.е. отличие частоты, генерируемой подстраиваемым генератором от частоты, которая точно соответствует эталонному значению. Система ЧАПЧ имеет широкий диапазон начальных расстроек, в котором она способна резко снижать расстройку генератора относительно эталонной частоты или частоты передатчика.
Особенностью системы ФАПЧ является нулевая статическая ошибка регулирования по частоте, т.е. равенство частот опорного генератора и сигнала или подстраиваемого генератора и эталонного генератора. Вместе с тем существует статическая ошибка регулирования по фазе. Системы обычно имеют узкий диапазон начальных расстроек, в котором они осуществляют подстраивающее действие. Для устранения этого недостатка такие системы обычно используются совместно с ЧАПЧ, причем система ФАПЧ вступает в работу тогда, когда система ЧАПЧ введет частоту в область втягивания системы ФАПЧ
Билет №6
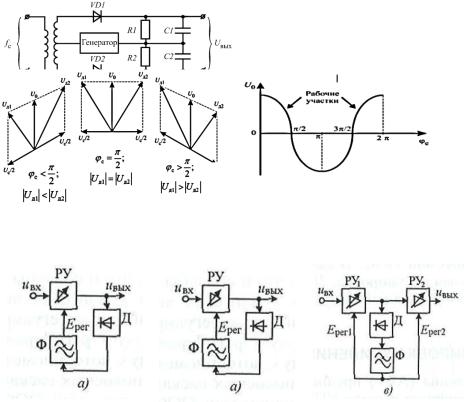
1. Фазовый детектор (Векторные диаграммы)
Фазовые детекторы преобразуют напряжение, модулированное по фазе, в напряжение, изменяющееся по закону модулирующей функции. Напряжение на выходе детектора определяется разностью фаз сравниваемых колебаний.
Рассмотрим балансную схему ФД.
Диоды VD1 и VD2 амплитудных детекторов включены однополярно, а нагрузки – встречно. Выходное напряжение образуется как разность напряжений, создаваемых каждым амплитудным детектором.
Напряжение сигнала приложено к диодам противофазно, а опорное – синфазно. Соответствующие векторные диаграммы выглядят следующим образом:
Результирующая детекторная характеристика балансного фазового детектора:
При с= /2 (3 /2) детекторные характеристики линейны и проходят через нуль, что весьма важно при применении фазового детектора в автоматических регуляторах частоты и фазы.
2. Системы АРУ.
Системами АРУ называются цепь, которая поддерживает заданный оптимальный уровень выходного напряжения независимо от уровня входного сигнала без изменения закона модуляции этого сигнала.
Различают: АРУ прямого, обратного и комбинированного действия.
В АРУ прямого типа цепь АРУ подключена ко входу регулируемого усилителя, напряжение регулировки рег получается в результате детектирования входного напряжения.
АРУ обратного типа цепь АРУ подключена к выходу регулируемого усилителя, напряжение регулировки рег получается в результате детектирования выходного напряжения.
АРУ комбинированного типа использует преимущества обеих схем: стабильность обратной АРУ и возможность получение идеальной характеристики прямой АРУ. Основная регулировка происходит в РУ; он, как правило, содержит несколько регулируемых каскадов. Второй регулируемый усилитель обычно однокаскадный, его основная задача - несколько скомпенсировать возрастающее напряжение на выходе пер-
вого усилителя. То, что идеальная регулировка на практике не достигается, не имеет большого значения, так как пределы изменения вых невелики.

Билет №7
1. Ограничители амплитуды сигналов
Ограничитель амплитуды сигналов устраняет паразитную амплитудную модуляцию во время приема ЧМ и ФМ сигналов.
Ограничитель амплитуды состоит из безынерционного нелинейного элемента (являющегося ограничителем) и резонансного фильтра (выделяет спектральную зону в области частоты входного сигнала).
Амплитудная характеристика ограничителя амплитуды выглядит следующим образом:
Как только амплитуда входного сигнала превысит пороговый уровень Uвх1, коэффициент передачи ограничителя амплитуд будет падать. Качество работы ограничителя амплитуд характеризуется коэффициентом ограничения:
|
вх⁄ |
Когр. = |
вх1 |
вых⁄ |
|
|
вых1 |
Для улучшения качество ограничения нужно снижать порог ограничения, либо увеличивать коэффициент усиления. Рассмотрим транзисторный ограничитель амплитуды:
Сопротивление термостабилизации намеренно отсутствует, потому что благодаря нему осуществляется
обратная отрицательная связь. А именно из-за нее сдвигается рабочая точка при изменение амплитуды выход-
ного сигнала, что ведет к препятствие созданию перегрузочного режима и ухудшению ограничительных ха-
рактеристик.
Если амплитуда входного напряжения такова, что превышает размах, ограниченный стрелками на приведенной характеристике 2, то начинается отсечка коллекторного тока снизу и насыщение сверху.
2. Комбинированная АРУ
В данной схеме реализуются преимущества обоих схем АРУ: стабильность обратной АРУ и возможность получение идеальной характеристики прямой АРУ. Основная регулировка происходит в РУ; он, как правило, содержит несколько регулируемых каскадов. Второй регулируемый усилитель обычно однокаскадный, его основная задача - несколько скомпенсировать возрастающее напряжение на выходе первого усилителя. То, что идеальная регулировка на практике
не достигается, не имеет большого значения, так как пределы изменения вых невелики.

Билет №8
1.Работа диодного детектора в режиме «сильного» сигнала
Вслучае детектирования сильных сигналов Um > 0,7 ÷ 0,8, детекторную характеристику можно представить в виде кусочно-линейной функции. В этом случае процесс детектирования можно пояснить с помощью эпюр напряжения.
Если на детектор подается АМ–сигнал, а сам детектор линеен и безынерционен по отношению к огибающей, то можно вывести выражение UΩ = U0m cos θ. С учетом этого коэффициент передачи амплитудного детектора при детектировании АМ–колебания определяется выраже-
нием: K = UΩ = cos θ.
mU0
Таким образом, идеальный безынерционный детектор не создает нелинейных искажений огибающей, так как его коэффициент передачи постоянен и равен cos . Это дает основание называть детектор сильных сигналов линейным детектором. Величина коэффициента передачи детектора может быть очень близкой к единице при достаточно большом произведении S ∙ R (S – крутизна диодной характеристики, R – нагрузка детектора). Это приводит к тому, что в современных приемниках применяют, как правило, режим детектирования сильных сигналов.
2. Инерционные АРУ
Такие системы с большой постоянной времени цепи обратной связи (0,1 с и более).
Согласно лекции к данного вида регулировке относятся прямые АРУ и обратные АРУ (простые, с усилением, простые с задержкой, с усилением и задержкой).
Билет №9
1. Работа диодного детектора в режиме «слабого» сигнала При детектировании слабых сигналов диод работает без отсечки тока. Рабочий участок детектирования находится в пределах криволинейной части статической характеристики диода.
Для случая детектирования слабых сигналов получено выражение для уравнения детекторной характеристики в следующем виде:
|
1 f″(Uп) |
R |
н |
||
|
4 f′(Uп) |
||||
|
|
||||
U = I ∙ Rн = |
|
|
|
|
Uc2 = A ∙ Uc2 |
1 |
|
|
|
||
|
+ Rн |
||||
|
f′(Uп) |
||||
Из последнего выражения следует, что детекторная характеристика диодного детектора при слабых сигналах имеет вид квадратичной параболы. Поэтому диодные детекторы слабых сигналов часто называют квадратичными.
Квадратичность детекторной характеристики приводит к значительным нелинейным искажениям АМ–сигнала. Для этого случая коэффициент нелинейных искажений может быть определен по следующей формуле: Ки = m4
Дополнительными недостатками квадратичного амплитудного детектора являются низкий коэффициент передачи К = Uвых⁄Uc,
Поскольку допустимый коэффициент искажений в радиовещании не превышает менее 5%, то это налагает ограничения на допустимую глубину АМ–колебания в передатчике (m < 20%). При этом очень непроизводительно расходуется мощность передатчика, вкладываемая в несущее колебание. В этом состоит главная причина, по которой детектирование слабых сигналов не применяется в современных связных и радиовещательных приемниках.
2. Временная АРУ Временная АРУ применяется в радиолокационных приемниках. В локационных системах приемник и передатчик находятся в непосредственной близости, поэтому чувствительность
приемника можно осуществлять за счет запуска синхроимпульсом передатчика специального генератора управляющего напряжения системы АРУ. Сигнальные импульсы
Управляющее напряжение
Коэффициент усиления
Принцип формирования напряжения ВАРУ заключается в том, что одновременно с излучением зондирующего СВЧ импульса, автоматически включается схема регулировки усиления приемника, которая формирует импульс, состоящий из прямоугольного импульса (длительность которого равна длительности зондирующего) и экспоненциальной составляющей. Прямоугольная составляющая сигнала ВАРУ запирает усилительные каскады приемника на время излучения мощного СВЧ импульса, а экспоненциальная составляющая плавно, по экспоненте, постепенно открывает усилительные каскады, тем самым увеличивает усиление приемника во времени (то есть – по дальности)
Билет №10
1.Синхронный амплитудный детектор.
Всинхронных детекторах под воздействием гетеродина периодически во времени меняются параметры цепи. Поскольку к таким устройствам относятся ПЧ, то структурная схема СД совпадает со структурной схемой ПЧ. Отличие СД от ПЧ заключается в том, что что частоту гетеродина выбирают равной частоте несущего колебания на входе детектора и, таким образом, реализуется нулевая промежуточная частота. Т.е гетеродин должен быть синхронным с сигналом. г =
с, вых =
Ток на выходе синхронного детектора имеет вид:
вых0 = 0,5 ∙ 1 ∙ ∙ ( г − с)
Выходное напряжение:
вых = вых0 ∙ н = 0,5 ∙ 1 ∙ ∙ н ∙ ( г − с)
Для реализации синхронности и синфазности гетеродина создается специальная цепь синхронизации, включающая в себя фильтр для выделения несущего колебания Uс, которое подводится к фазовому детектору системы автоматической подстройки частоты гетеродина.
Достоинства: линейность амплитудной характеристик, начиная с очень слабых сигналов; частотная избирательность осуществляется за счет изменения параметров выходного фильтра
2. Цифровая АРУ Цифровые АРУ применяются для управления РЛС и обработки радиолокационной информации.
ССК - схема сравнения кодов, СУЗ - схема усреднения и запоминания.
Работу цифровой АРУ можно пояснить следующим образом. Сигналы с видеоусилителя поступают на АЦП системы АРУ. Далее цифровой сигнал сравнивается с эталонным значением и на выходе системы сравнения кодов появляется цифровой сигнал рассогласования подается на ЦАП. На выходе ЦАП формируется аналоговый сигнал управления усилением приемника.
Достоинства: сохранения установленного усиления при перерывах в приеме сигналов; независимость регулировочных характеристик от разброса и конкретных свойств цепи АРУ.