

УМК Коровкин-Кулик
.pdf∑F = 0 : XA – F′ – F′ + F′ = 0 XA = 2 кН; |
||
KX |
1 |
2 3 |
∑mA = 0 : F1′ ·4 + F2′′ ·2 + F2′ ·6 + F2′′ ·6 – F3·4 + YB·12 = 0; YB = –2 кН.
∑F = 0 : YA + F′′ |
+ F′′ + YB = 0 YA = –1 кН. |
|
KY |
1 |
2 |
Проверка: |
|
|
∑mB = 0 : –Y A·12 + F1′ ·4 – F1′′ ·10 + F2′ ·6 – F2′′ ·6 – F3·4 = 0; |
||
–(–1) |
·12 + 1·4 – 2 ·10 + 3·6 – 1 ·6 – 2 ·4 = 0. |
|
Реакции найдены верно: |
|
|
|
34 – 34 = 0. |
|
Определяем усилия в стержнях фермы методом вырезания узлов. Усилия в перерезанных стержнях направляем от рассматриваемого узла, считая, что любой стержень работает на растяжение. Придерживаемся по- следовательности, показанной в порядке расчета. Узел А находится в рав- новесии под действием плоской системы сходящихся сил (рис. 17, а).
Поэтому
∑FKX = 0
∑FKY = 0
(1)
Рис. 17 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
По рис. 16 находим sinα1 = 4 / 20 = 0,895; cosα1 = 2 / |
20 = 0,447. |
||||||
Решая систему (1), получаем: S1 = 1,12 кН; S8 = –2,50 |
кН. |
||||||
Производим графическую |
|
|
|
|
|
||
проверку правильности опреде- |
|
|
|
|
|
||
ления усилий S1 и S8. С этой це- |
|
|
|
|
|
||
лью выбираем масштаб для изо- |
|
|
|
|
|
||
бражения сил и строим силовой |
|
|
|
|
|
||
многоугольник из сил, сходящих- |
|
|
|
|
|
||
ся в данном узле (см. рис. 17, б). |
|
|
|
|
|
||
Рис. 18 |
|
|
|
|
|||
Так как силовой много- |
|
|
|
|
|||
|
|
|
|
|
|||
угольник получился замкнутым, то усилия S1 и S8 найдены верно. |
|||||||
Узел I (рис. 18, а). На него действуют силы |
′ |
|
|
|
|||
F1, S1 = −S1 , S2 и S9 . |
|||||||
231
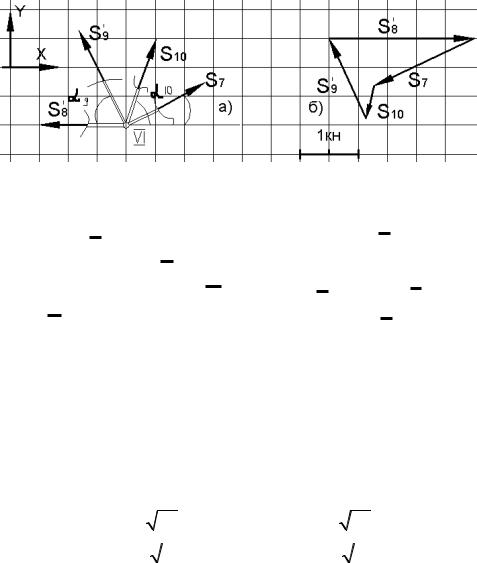
Составляем уравнения равновесия узла:
∑FKX = 0 |
′ |
− F1x |
+ S2 cos α2 + S9 cos α9 = 0 ; |
−S1 cos α1 |
|||
∑FKY = 0 |
′ |
+ F1y |
+ S2 sin α2 − S9 sin α9 = 0 ; |
−S1 sin α1 |
(2)
(sin α9 = sin α1 = cos α2 = 4 /  20 = 0,895 ; cos α9 = cos α1 = sin α2 = 2 /
20 = 0,895 ; cos α9 = cos α1 = sin α2 = 2 / 
 20 = 0, 447).
20 = 0, 447).
Решая систему (2) получаем: S9 = 1,56 кН; S2 = 0,894 кН.
Проводим графическую проверку правильности определения S2 и S9. Для этого в принятом ранее масштабе строим многоугольник сил, сходящихся в узле I (см. рис. 18, б). Силовой многоугольник получился
замкнутым. Следовательно, S2 и S9 найдены верно.
Узел VI (рис. 19)
|
|
|
|
|
|
|
Рис. 19 |
|
|
|
|
|
∑FKX = 0 |
′ |
′ |
α9 + S10 cos α10 + S7 cos α7 = 0 ; |
|||||||||
−S8 |
− S9 cos |
|||||||||||
∑FKY = 0 |
S9 sin α9 + S10 sin α10 + S7 sin α7 = 0 ; |
|
|
|
|
|||||||
|
sin α9 = 0,895; cos α9 = 0,447; |
(3) |
||||||||||
|
sin α7 = 2 / |
|
|
|
= 0, 447; |
cos α7 = 4 / |
|
|
= 0,895; |
|||
|
20 |
20 |
||||||||||
|
sin α10 = 3/ |
|
|
= 0,949; |
cos α10 = 1/ |
|
|
= 0,316. |
||||
|
10 |
10 |
||||||||||
|
′ |
|
|
|
|
|
′ |
|
то решение системы (3) |
|||
Так как S8 = |
S8 = 2,50 кН; S9 = S9 = 1,56 кН, |
|||||||||||
дает: S7 = –1,79 |
кН; S10 = –0,636 кН. Знаки «–» указывают на то, что эти |
|||||||||||
стержни сжаты. |
|
|
|
|
|
|
|
|
|
|
|
|
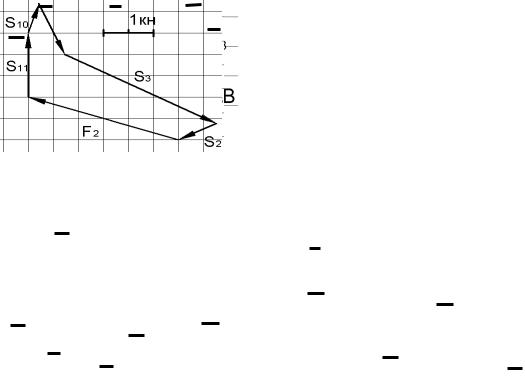
Рассматривая аналогичным образом следующий узел (узел V), нахо- |
||||||||||||
дим: S11 = –1,6 |
кН; S6 = –1,79 кН (стержни сжаты) и производим графиче- |
|||||||||||
скую проверку. |
|
|
|
|
|
|
|
|
|
|
|
|
Для определения усилий в остальных стержнях воспользуемся методом сквозных сечений. Проводим сечение по стержням 3, 13, 5 (рис. 20). Рас- сматриваем равновесие правой (отсеченной) части (см. рис. 20). Действие перерезанных стержней заменяем их усилиями. Для их определения со-
232

ставляем такие уравнения равновесия, чтобы в каждое из них входило по одной неизвестной силе. Этого можно добиться, составляя уравнения мо- ментов относительно точек, где пере- секаются линии действия двух неиз- вестных усилий (так называемых то- чек Риттера).
Например, для определения S3 находим точку пересечения усилий S5 и S13 – узел IV. Для определения S5 – узел III. Для определения S13 – точка К. Составляем уравнения моментов отно- сительно точек III и IV:
∑mIII = -4 + YB × 2 = 0; S5 = -1 кН;
(4)
∑mIV = S3h3 - F3 × 2 + YB × 4 = 0,
где h3 – плечо силы S3 относительно узла IV.
Из рис. 20 видно, что стержни 3 и 13 перпендикулярны. Поэтому h3
равен длине стержня 13: |
|
|
|
|
|
|
|
|
|
|
|
|
|
h = 22 |
+ 42 |
= |
|
= 4, 46 м. |
|
|
20 |
|
|||||
3 |
|
|
|
|
|
|
Поэтому из уравнения (4) находим S3 = 3,58 кН. Составляем сле- |
||||||
дующее уравнение равновесия для определения S13: |
|
|||||
∑mK = 0 |
|
|
S13h3 - F3 × 4 + YB × 6 = 0 . |
(5) |
||
Взаимное расположение точки К и узлов фермы определяем по рис. 20. В частности, КВ = 6 м, a h13 равно расстоянию от точки К до узла III.
Так как стержень S3 перпендикулярен к S13, то h13 = 
 42 + 82 =
42 + 82 = 
 80 = 8,94 м.
80 = 8,94 м.
Из уравнения (5) находим S13 = –0,447 кН (стержень сжат).
Проводим сечение по стержням 3, 12 и 6 (рис. 21), чтобы найти усилие S12 (уси- лия S3 и S6 найдены ранее). Рассматриваем равновесие правой отсеченной части.
Имеем:
sin α12 = 3/ 
 10 = 0,949; α12 = 71,35;
10 = 0,949; α12 = 71,35;
sin α13 = 4 / |
20 |
= 0,894; α13 = 63, 25. |
Рис. 21 |
233
Линии действия усилий S3 и S6 параллельны, т.е. не имеют точки пере- сечения, поэтому для определения S12 составляем уравнение проекций на ось Z, перпендикулярную к этим усилиям (ось Z направлена от узла IV к узлу III):
∑FKZ = 0 ; |
|
S12 cos γ + F3 cos α13 + YB sin α13 = 0 |
(6) |
Угол γ между S12 и осью Z
γ = 180° − α12 − α13 = 45°.
Решая уравнение (6), получаем: S12 = 1,27 кН.
Для определения неизвестного усилия составляем уравнение (рис. 22):
∑mIV = 0 ;
S4 sin a4 × 4 + YB × 4 = 0, где sin a4 = 0,895.
Следовательно, S4 = 2,24 кН.
Рис. 22
Выполним графическую проверку правильности полученных резуль- татов, для чего построим силовой многоугольник для узла II (рис. 23).
б)
а)
Рис. 23
Усилия во всех стержнях определены. Результаты расчета сводим в таблицу.
XA |
YA |
YB |
S1 |
S2 |
S3 |
S4 |
S5 |
2,0 |
–1,0 |
–2,0 |
1,12 |
0,894 |
3,58 |
2,24 |
1,0 |
|
|
|
|
|
|
|
|
S6 |
S7 |
S8 |
S9 |
S10 |
S11 |
S12 |
S13 |
–1,79 |
–1,79 |
–2,50 |
1,56 |
–0,632 |
–1,60 |
1,27 |
–0,447 |
|
|
|
|
|
|
|
|
Задачи 5, 6. Равновесие произвольной пространственной системы сил (ломаный стержень, вал).
234

Порядок выполнения
1.Выделим тело (объект), равновесие которого будем рассматривать.
2.Прикладываем заданные силы.
3.Заменяем наложенные связи их реакциями.
4.Проводим оси координат, совмещая начало отсчета с точкой, в которой приложено наибольшее число реакций связей.
5.Составляем уравнения равновесия.
6.Определяем неизвестные величины.
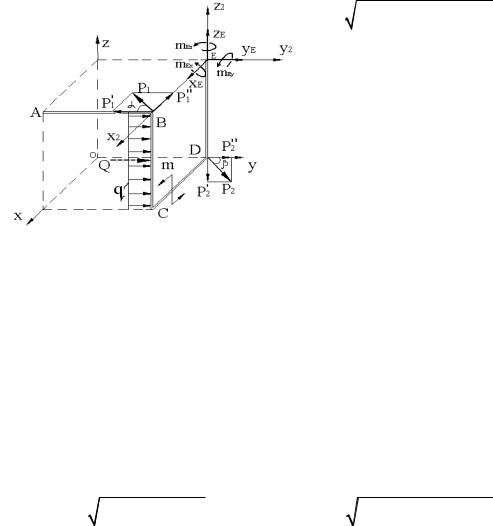
Пример 7. Определение реакции жесткой заделки стержня
Определить реакции жесткой заделки стержня в двух случаях: а) крепление в точке А (рис. 24); б) крепление в точке Е (см. рис. 24).
Сравнить полученные результаты.
Дано: Р1 = Р2 = 400 Н; m = 400 Н×м; q = 600 Н/м; a = 45°; b = 30°;
АВ = ВС = CD = DE = 1 м.
P лежит в плоскости, параллель-
1
ной OXY; P2 – в плоскости, па- раллельной OZY.
Рис. 24
Решение. Рассмотрим случай крепления стержня концом А при по- мощи жесткой заделки (рис. 25). Саму заделку сразу заменим соответствую- щей системой сил реакций X A , YA , Z A и реактивными моментами mAX ,
m |
|
, m |
|
. Силы |
|
|
|
раскладываем на составляющие, параллельные |
||||||||||||
AY |
AZ |
P |
и |
P |
||||||||||||||||
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
осям координат: |
) |
|
2 |
( 2 |
2 |
) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
( 1 |
1 |
|
, |
|
|
|
|
|
|
|
|
|||||
|
|
|
P P¢, P¢¢, 0 |
|
; P P¢¢, P¢, 0 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где P′ = |
P sin α = 282,8 Н ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P′′= P cos α = 282,8 Н ; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P′′= P sin β = 200 Н; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
P2′′ = P2 cosβ = 346,4 Н.
Равнодействующая распределенной нагрузки
Q = q × BC = 600 ×1 = 600 Н.
Рис. 25
235
Составляем уравнения равновесия стержня под действием произ-
вольной пространственной системы сил: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
∑F = 0 : |
|
|
|
|
|
X |
A |
- P′ = 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
KX |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
∑F = 0 : |
|
|
|
|
|
|
|
|
′′ |
|
′′ |
|
|
|
= 0 ; |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Y - P + P + Q |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
KY |
|
|
|
|
|
A |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
∑FKZ = 0 : |
|
|
|
|
|
Z A - P2′ = 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
∑mx |
= 0 : |
|
|
|
|
|
|
|
m |
AX |
+ Q × BC / 2 - P′ × AB + P′′× BC = 0 ; |
|||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
||
|
|
∑my |
= 0 : |
|
|
|
|
|
|
|
m |
AY |
+ m - P′ ×CD = 0 ; |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
∑mz1 = 0 : |
|
|
|
|
|
m |
AZ |
+ P¢¢ × AB - P ¢¢ ×CD = 0 . |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
Решая полученные уравнения, находим: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
XA = 282,8 Н; YA = –663,6 |
|
Н; ZA = 200 H; |
|
|||||||||||||||||||||
|
|
|
|
|
|
mAX = 746,4 Н×м; mAY = –200 Н×м; mAZ = 63,6 Н×м. |
||||||||||||||||||||||||||||
Вычислим силу реакции и момент в заделке: |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
R |
A |
= X 2 |
+ Y 2 + Z |
2 |
|
= 748,6 H; M |
A |
= |
|
|
m2 |
+ m2 |
|
+ m2 |
= 775,3 H. |
|||||||||||||||||||
|
|
|
|
|
A |
|
|
|
A |
A |
|
|
|
|
|
|
|
|
|
|
|
AX |
|
AY |
|
AZ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим |
случай жесткой |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
заделки стержня концом Е и опреде- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лим реакции этой связи (рис. 26). |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Составляем |
уравнения равно- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
весия: |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑F |
|
|
|
= 0: XЕ |
– P′′ = 0; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KX |
|
|
|
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑F |
|
|
|
= 0: YЕ |
+ Q – P′′ |
+ P′′ = 0; |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KY |
|
|
|
|
|
1 |
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑FKZ = 0: ZЕ – P2′ = 0; |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑m |
|
= 0 : mEX + Q×BC/2 + P′′ ×BC = 0; |
||||||||||
|
|
Рис. 26 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x 2 |
|
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑m |
|
|
= 0 : mEY + m = 0; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y 2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑m |
= 0 |
: m |
EZ |
- P′ |
×CD + Q ×CD = 0 . |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
2 |
|
|
|
1 |
|
|
|
||
Откуда находим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
XE = 282,8 Н; YE = – 663,6 |
|
Н; ZE = 200 H; |
|
|||||||||||||||||||||
|
|
|
mEX = – 646,4 |
|
Н×м; mEY = – 400 Н×м; mEZ = – 317,2 Н×м. |
|||||||||||||||||||||||||||||
Вычисляем силу реакции в заделке и реактивный момент:
R = |
X |
2 |
+ Y 2 |
+ Z |
2 |
= 748,6 H; M |
E |
= |
m2 |
+ m2 |
+ m2 |
= 823,6 H. |
E |
|
E |
E |
|
E |
|
|
EX |
EY |
EZ |
|
236
Выводы:
1.Величина силы реакции не зависит от места крепления стержня с помощью жесткой заделки.
2.Реактивный момент в случае закрепления стержня концом А меньше, чем при креплении его концом Е.
Следовательно, предпочтение следует отдать креплению стержня концом А.
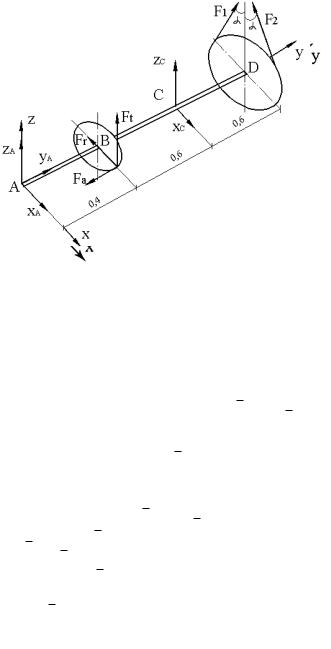
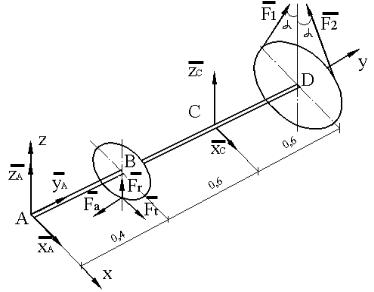
Пример 8. Исследование равновесия вала
Дано:
Ft = 1000 H;
Fr = 300 H;
Fa = 200 H; α = 45°; F1 = 2F2.
В точке А – опора, фикси- рующая вал от осевого смещения (подпятник), в точке С – под-
шипник (рис. 27). Диаметры зуб-
Рис. 27
чатого колеса и шкива соответ-
ственно равны: d = 0,2 м; D = 0,4 м. Определить натяжение ветвей ремня и реакции опор вала, считая, что он находится в равновесии.
Решение. |
В подпятнике сила реакции может |
быть разложена на три |
составляющие: |
RA = X A + YA + Z A . В подшипнике – |
на две: RC = XC + ZC . |
К числу неизвестных относится натяжение одной из ветвей ремня. Учитывая, что под действием окружной силы
Ft = 1000 H, приложенной к зубча- тому колесу, вал может вращаться ускоренно против хода часовой стрелки (если смотреть со стороны точки А), а силы натяжения ветвей
ремня F1 и F2 должны препятство-
вать этому ускоренному вращению вала, то приходим к выводу, что ве-
дущей ветвью ремня с натяжением
Рис. 28
F1 является левая ветвь, а ведомой –
правая ветвь с натяжением F2 (рис. 28).
237
Теперь рассмотрим равновесие вала. Составляем уравнения равновесия:
∑mY = 0: |
– Ft ×d/2 + F1×D/2 – F2×D/2 = 0; |
∑mZ = 0: |
Fr ×AB – XC×AC – F1sina×AD + F2sina×AD – Fa ×d/2 = 0; |
∑mX = 0: |
F ×AB + ZC×AC + F1cosa×AD + F2cosa×AD = 0; |
|
t |
∑FKX = 0: |
XA – Fr + XC – F2sina + F1sina = 0; |
∑F = 0: |
YA – Fa = 0; |
KY |
|
∑FKZ = 0: |
ZA + Ft + ZC + F1cosa + F2cosa = 0. |
Решая их (с учетом, что F1 = 2F2), получаем:
F2 = 500 Н; F1 = 1000 Н; XС = – 465,6 Н;
XA = 412,1 Н; ZC = – 2096,8 Н; ZA = 36,3 H; YA = 200 Н.
Правильность решения проверяем двумя уравнениями равновесия:
∑mX C = 0 : – Ft×BC – ZA×AC + F2cosa×CD + F1cosa×CD = 0;
∑mZ C = 0 : – Fa ×d/2 + XA ×AC – Fr ×BC + F2sina×CD – F1sina×CD = 0.
Подстановкой исходных данных и результатов решения убеждаемся, что эти уравнения переходят в тождество типа 0 = 0. Это свидетельствует о правильности найденных значений сил.
Алогичным образом, рассмотрев второй случай нагружения вала (рис. 29), получаем:
ZС = – 1796,8 Н; XС = – 965,6 Н; ZA = 436,3 Н; XA = – 387,9 Н; YA = 200 Н.
Рис. 29
238

Вычисляем результирующие реакции в точках А и С для двух случа- ев нагружения вала.
Первый случай (см. рис. 28):
RA = 
 X A2 + YA2 + Z A2 = 459,5 H; RC =
X A2 + YA2 + Z A2 = 459,5 H; RC = 
 XC2 + ZC2 = 2147,9 H.
XC2 + ZC2 = 2147,9 H.
Второй случай (см. рис. 29):
RA = 617,1 H; RC = 2256,8 H.
В качестве критерия сравнения принимаем величины RA2 + RC2 :
Первый случай: R2 |
+ R2 |
= 4,825 кН2. |
A |
C |
|
Второй случай: R2 |
+ R2 |
= 5,09 кН2. |
A |
C |
|
Таким образом, во втором случае нагружения валу передаются боль- шие нагрузки, поэтому первый случай нагружения вала предпочтительнее.
РГР-2
Выполнение этой работы вырабатывает навыки и умения определять кинематические характеристики точек и тел при различных случаях его движения. Расчетно-графическая работа содержит 4 задачи.
Задача 1. Кинематика простейших движений твердого тела.
Порядок выполнения
1.Выполняем анализ движения звеньев передаточного механизма.
2.По заданным параметрам вращательного движения определяем угловую скорость и угловое ускорение и показываем их направления на рисунке в соответствии с полученными знаками.
3.Определяем радиус вращения точки.
4.Находим скорость точки и показываем ее вектор на рисунке пер- пендикулярно к радиусу вращения в сторону ω.
5.Вычисляем нормальную и касательную составляющие ускорения
точки и показываем их направления на рисунке из условия: a τ перпенди-
кулярно к радиусу вращения в сторону ε , a n – по радиусу вращения к оси вращения.
6. Находим ускорение точки.
239
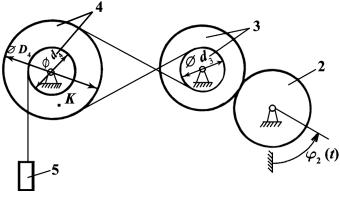
Пример 9. Вычислить модули и указать направления кинематических параметров, характеризующих движение тел и точек системы в момент време- ни t1 = 2 c, если дано уравнение вращения тела 2:
ϕ2 = 40 e– t – t2 (рад).
При вычислениях принять:
−количество зубьев колес зубчатой передачи z2 = 20, z3 = 40;
−диаметры шкивов ременной передачи d3 = 20 см, D4 = 60 см;
−диаметр барабана d4 = 20 см;
−удаление точки К от оси вращения тела 4 hk = 20 см (рис. 30).
Решение. Выполняем черновой рисунок (здесь он не приводится), показывающий картину движения механизма в положительном направлении, т.е. колесо 2 вращается против хода часовой стрелки (в сторо-
Рис. 30 ну увеличения угла ϕ2, пока- занного на черновом рисунке).
Последовательно переходя от тела 2 к телу 3, а от него к телу 4, получаем, что колесо 4 вращается тоже против хода часовой стрелки и груз 5 опус- кается вниз. Это – картина движения механизма в положительном на- правлении.
По заданному уравнению вращения тела 2 находим его дуговую ко-
ординату ϕ2(t1), угловую скорость ω2(t1) и угловое ускорение ε2(t1) в мо- мент времени t1:
|
|
|
|
|
dϕ2 |
|
|
|
∙ |
(t) = −40 e−t − 2t рад/с; |
|||||
|
|
ω (t ) = |
|
|
= ϕ |
2 |
|||||||||
|
|
|
|
|
|
||||||||||
|
|
2 |
1 |
|
dt |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
dω2 |
|
|
d |
2 |
ϕ2 |
|
|
∙∙ |
|
(t) = +40 e−t |
|
|
ε |
2 |
(t) = |
|
= |
|
|
= ϕ |
2 |
− 2 рад/с2. |
||||||
|
|
|
|
|
|||||||||||
|
|
dt |
|
dt 2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||
При t1 = 2 c: ϕ2(t1) = 1,41 рад; ω2(t1) = – 9,41 рад/с; ε2(t1) = 3,41 рад/с2.
Выполняем новый рисунок (рис. 31) – схему механической передачи,
показав на нем истинные направления ω2 = 9,41 рад/с (по часовой стрелке),
ε2 = 3,41 рад/с2 (против часовой стрелки) и координату ϕ2 = 1,41 рад.
240