

18.Принцип действия и особенности синхронных гистерезисных двигателей.
Их роторы изготовлены из магнитотвердого сплава с широкой гистерезисной петлей, и их намагничивает вращающееся магнитное поле статора. Они могут действовать как синхронным, так и асинхронным способом.
Для них характерны:
очень высокий пусковой момент;
токовая конфигурация порядка 20-30% при переходе с холостого хода в режим КЗ;
плавный вход в режим синхронизма.
Двигатели этого типа выгодно отличаются от реактивных простотой конструкции, надежностью и маломощностью в работе, а также небольшим размерам и весом. Их выпускают и на 50 герц, и на другие частоты. Обладая мощностью не более 400Вт, они бывают одно- и двухскоростными.
19. Математическая модель МП ЭМ на основе метода удельной проводимости зазора.
20.Принцип редукции частоты вращения двигателя с использованием зубцовых гармоник МП.
21.Выражения магнитодвижущих (намагничивающих) сил (МРС) и удельной проводимости рабочего зазора и способы обеспечения взаимодействия гармоник МП асинхронного редукторного двигателя.
22.Выражения МРС и удельной проводимости рабочего зазора и способы обеспечения взаимодействия гармоник МП синхронного редукторного двигателя.
23.Разновидности и особенности синхронных редукторных двигателей с катковым и волновым ротором.
Синхронные электрические двигатели с катящимся ротором (ДКР) применяют для систем автоматики в качестве безредукторных тихоходных малоинерционных исполнительных двигателей.
24.Обоснование принципа действия и коэффициента редукции частоты вращения двигателей с катковым и волновым роторами.
Принципиальной особенностью двигателей с катящимся ротором (ДКР), отличающей их от других машин, является эксцентричное расположение ротора в расточке статора. Вращающий момент здесь создается за счет сил одностороннего магнитного притяжения.
Достоинства двигателей с катящимся ротором 1) возможность получения очень малых скоростей (коэффициент редукции достигает 1500); 2) хорошее быстродействие (время разгона не превышает 0,01 с); 3) большие пусковые моменты; 4) небольшая кратность пускового тока
5) отсутствие подшипников, что обеспечивает работу машины практически без смазки. Недостатки двигателей с катящимся ротором 1) сложность конструкции звена, обеспечивающего передачу несоосного вращения на вал машины. Требуются механизмы типа кардана, альстома, сешерона; 2) вибрации и шум, обусловленные действием центробежных и аксиальных сил, вызванных несоосным вращением больших масс; 3) неизбежный технологический разброс размеров обкатываемых поверхностей, а следовательно, и разброс выходных скоростей вращения ДКР; 4) сравнительно небольшой срок службы вследствие износа поверхностей катков.
Двигатели с волновым ротором Волновые двигатели (ВД) представляют собой конструктивное объединение электрической машины и волновой передачи. Особенностью таких двигателей является гибкий, деформирующийся в радиальном направлении ротор.
Достоинства волновых двигателей похожи на достоинства двигателей с катящимся ротором: 1) большие вращающие моменты при относительно малой массе; 2) высокие значения момента самоторможения и практически отсутствие выбега; 3) способность к частым пускам и реверсам. Недостатком ВД следует считать сложность конструкции и технологии изготовления эластичного ротора.
25.Разновидности, особенности, принципы действия и упрощенная электрическая схема вентильного двигателя постоянного тока.
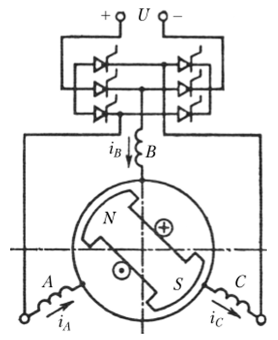 Схема
трехфазного вентильного двигателя
Схема
трехфазного вентильного двигателя
26. ЭММ, характеристики и показатели вентильных двигателей.
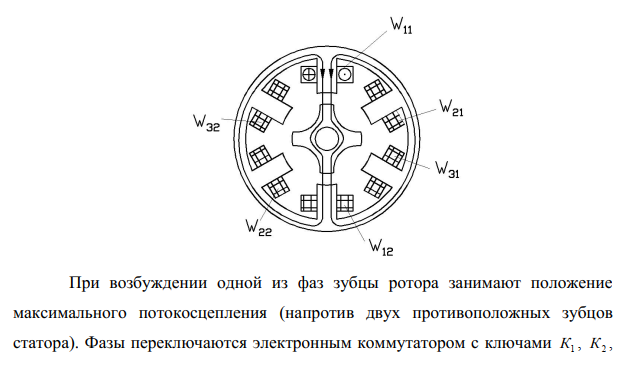
27.Разновидности, особенности, принцип действия, схемотехнические решения и показатели шаговых двигателей.
Содержательный модуль 3. Индукционные информационные ЭМ.
28.Назначение, разновидности и особенности конструкций сельсинов и электромеханических систем синхронной связи.
29. Особенности работы и обоснование уравнений сельсинов в индикаторном режиме.
Работа сельсинов в индикаторном режиме Схема индикаторной связи приведена на рис. 5.4. Будем считать, что оба сельсина совершенно одинаковы и от одного датчика питается только один приемник
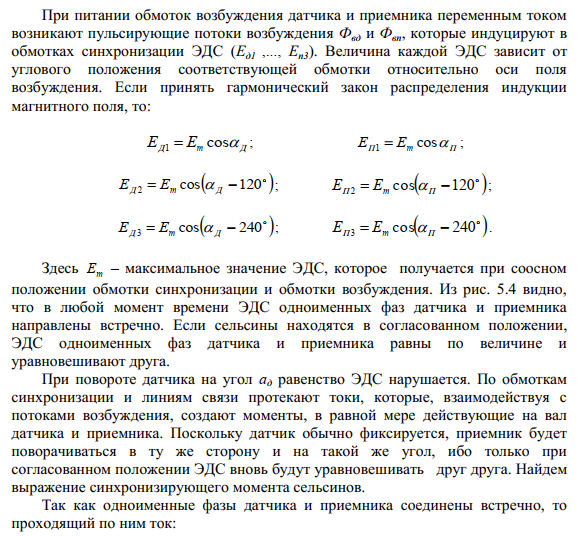
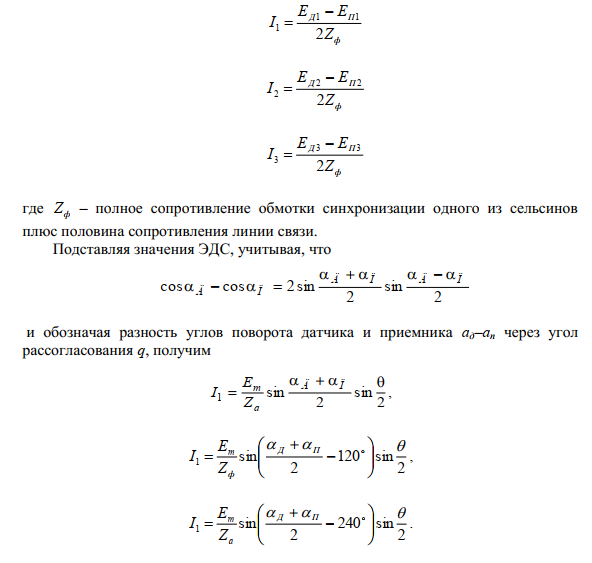


30.Синхронизирующий электромагнитный момент и удельный синхронизирующий момент разновидностей сельсинов.
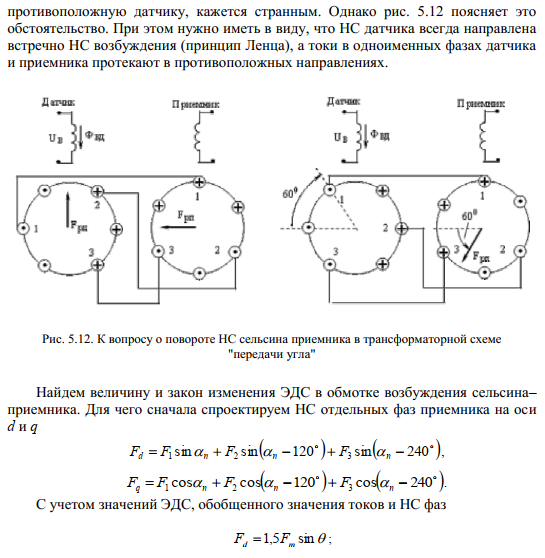
31. Особенности работы и обоснование уравнений сельсинов в трансформаторном режиме.
32.Анализ особенностей и обоснование работы дифференциальных и трехфазных сельсинов.
33.Обоснование, работа и особенности сельсин-двигателя и магнесина.
34.Особенности и недостатки синхронных ТГ.
Синхронный тахогенератор (СТГ) является простейшим тахогенератором переменного тока. Конструктивно он подобен однофазному синхронному генератору небольшой мощности с ротором в виде постоянного магнита–звездочки
35.Обоснование принципа действия и исходной характеристики идеального асинхронного ТГ (АТГ).
36.Погрешности реального АТГ, их причины, способы и технические решения понижения. 37.Уравнение и калибровка исходной характеристики, векторная диаграмма исходной ЭДС и преимущества АТГ, асинхронные датчики ускорения.
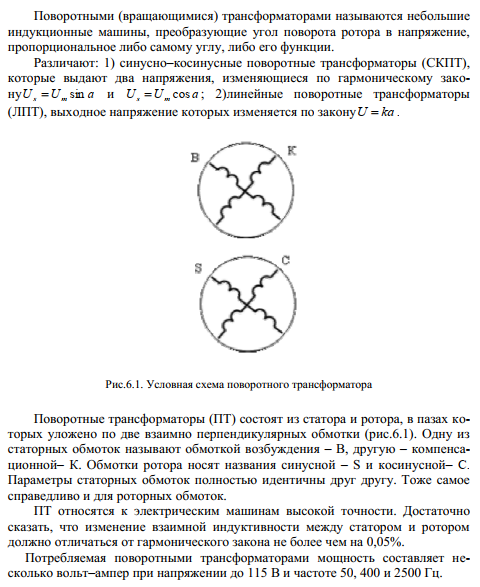
38.Назначение, разновидности конструкции и обоснование принципа действия синусно-косинусного вращающегося трансформатора (ОТ).
39.Причины наличия квадратической погрешности ОТ.
40.Анализ способов снижения погрешностей ОТ на основе вариантов симметрирования.
41.Особенности редуктосинов и индуктосинов.
42.Назначение и обоснование возможностей преобразования сигналов и координат линейным ОТ.
43. Масштабные ОТ и их принципиальные электрические схемы.