

Виды коллекторных двигателей
В зависимости от источника тока, к которому подключается мотор, коллекторные установки делят на два вида:
Работающий от источника постоянного тока. Используются в автомобилях, самоходной технике, детских игрушках и т.д. Отличаются простотой конструкции. Подключаются только к источнику постоянного тока;
Универсальный коллекторный двигатель. Работает как от постоянного, так и от переменного тока. Применяется в бытовых электрических приборах.
СПРАВКА: Универсальный коллекторный силовой агрегат отличается простотой конструкции и небольшими габаритно массовыми параметрами. Благодаря этому может быть использован в качестве силовой установки ручного инструмента.
В зависимости от максимальной мощности силовые установки делятся на три типа:
Небольшой мощности. Используются в детских игрушках, аудио – видеотехнике и т.д. Напряжение питания таких установок составляет от 1.5 до 9 Вольт. Оси якоря устанавливаются на специализированные втулки. Они играют роль подшипников скольжения. Токопроводящие щетки выполнены в виде двух пластин;
Средней мощности. Якорь устанавливается на втулках или подшипниках. Применяются на автомобильной и самоходной технике. Напряжение питания составляет от 12 до 24 вольта;
Высокой мощности. Отличаются высокими показателями мощности и наличием электрических магнитов.
Устройство коллекторного двигателя
Для того чтобы понять как работает коллекторный двигатель, необходимо разобраться в его конструкции. Независимо от вида силового агрегата он состоит из следующих основных элементов:
Якорь. Состоит из металлического вала, на который установлены обмотки. Вал устанавливается на подшипниках скольжения или качения в корпусе мотора. Якорь является движущейся частью мотора, которая передаёт крутящий момент к необходимому оборудованию;
Коммутатор (коллектор). Необходим для определения положения якоря. Располагается на роторе. Выполнен в виде медных контактов трапециевидного сечения;

Щётки. Изготовлены из графита. Щетки используются для подачи напряжения к обмоткам ротора;
Держатели щёток. Изготавливаются из металла или пластика. Держатели щёток устанавливаются на корпус мотора при помощи не проводящих ток прокладок. Такая конструкция исключает подачу напряжения на корпус мотора;
ВАЖНО: Щётки или держатели оснащаются пружинами. Они необходимы для прижимания щетки к коллектору во время работы силовой установки.
Подшипники. На небольших моторах используются пластиковые или металлические втулки. Мотор оборудован двумя подшипниками. Они необходимы для нормального вращения вала якоря;
Сердечник статора. Изготавливается из большого количества металлических пластин;
Обмотки. Необходимы для создания магнитного поля.
Содержательный модуль 2. Индукционные исполнительные, редукторные и электромеханотронные ЭМ.
9.Принцип действия и анализ особенностей электромагнитного процесса однофазного асинхронного двигателя (ад) методом двух вращающихся магнитных полей (мп).
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s - это
величина, которая показывает, насколько
синхронная частота n1 магнитного
поля статора больше, чем частота вращения
ротора n2,
в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр - критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме - 1 - 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
10.Заместительные схемы прямой и обратной последовательностей МП и тока однофазного АД.
11.Зависимость механической характеристики однофазного АД от сопротивления цепи ротора и электрической схемы статора.
12.Разновидности и особенности рабочего процесса однофазных АД со сплоченной обмоткой.
13.Анализ разновидностей асинхронных ИД и способов управления ими.


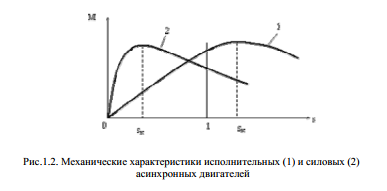
Большие сопротивления ротора приводят к увеличению потерь и снижению механической мощности. Поэтому асинхронные исполнительные двигатели имеют полезную мощность в 2¸ 3 раза меньшую, чем силовые двигатели такого же габарита
14.Анализ причин и обоснование способов устранения самохода исполнительных АД, сравнительный анализ электромеханических характеристик асинхронных ВД.
15.Показатели качества и способы обеспечения быстродействия исполнительных АД.
16.Работа трехфазного АД в однофазном режиме.

17.Разновидности и особенности синхронных микроэлектродвигателей.
Синхронные двигатели малой мощности (микродвигатели)
В чем основное отличие синхронных двигателей малой мощности (микродвигателей) от асинхронных моторов?
Их ротор является магнитом или электромагнитом малой мощности, а у маломощных агрегатов он не имеет обмотки возбуждения и щеток.
Токовая фаза может заметно опережать фазу напряжения.
Частота вращения постоянна и не зависит от нагрузки.
В целом на ротор из твердых магнитных материалов однократно воздействуют сильным импульсным полем, намагничивая его. Намагниченность полюсов сохраняется надолго. Если магнит изготовлен из мягкого материала, ротору придается соответствующая форма для того, чтобы магнитопровод обладал разным радиальным магнитным сопротивлением. Двигатели с постоянным магнитом имеют цилиндрический ротор из твердого магнитного материала. Их стартовая обмотка коротко замкнута.
Принципы работы синхронных двигателей малой мощности (микродвигателей)
При запуске такой двигатель действует по принципу асинхронного, возбуждаясь от поля постоянных магнитов в крутящемся роторе. Из-за этого в обмотке статора возникает эдс с непостоянной частотой. Она создает токи, вызывающие тормозящий момент. Достигнув скорости синхронизма, двигатель перестает быть в асинхронном состоянии, после чего входит в свой обычный режим синхронизма с соответствующей скоростью. Такие синхронные двигатели малой мощности (микродвигатели) используются в фототехнике, бытовых устройствах, часовых механизмах, в автоматике и т.д.
Синхронный реактивный мотор
Он оснащен равнополюсным ротором. Имеет стартовую обмотку и изготавливается из особой листовой стали. Короткозамкнутой обмоткой является заливка алюминиевым или другим диамагнетиком.
Мощность этих моторов обычно не превышает 100Вт, в целом, она в 2-3 раза ниже мощности двигателей с неизменными магнитами (хотя они проще в исполнении и дешевле). КПД от 0,35 до 0,4, а максимальный мощностной коэффициент – 0,5.
Какими достоинствами обладают синхронные микроэлектродвигатели?
Синхронные микродвигатели имеют множество различных исполнений:
– по типу полюсов (явнополюсные и неявнополюсные);
– по способу возбуждения (электромагнитное, с постоянными магнитами, гистерезисные, реактивные);
–по способу пуска (асинхронный, гистерезисный, частотный); по расположению магнитов (аксиальные, радиальные