

1 Аналіз математичної моделі сак бортовим прожектором та постановка задач дослідження
Аналіз об’єкта керування
Інтелектуальні методи САК положенням бортового прожектора гелікоптера дуже важко використовувати без інформацій про ОК. Більш того, провести процес фазифікації або скласти навчальну вибірку не можливо без всебічних досліджень на математичній моделі. Таким чином, необхідно отримати ПФ ОК, яка знадобиться для подальших досліджень, а саме для побудування математичної моделі з використанням методів нейронних мереж та нечіткої логіки.
Об’єкт керування – динамічний процес зміни положення бортового прожектора гелікоптера за азимутом та кутом місця. Для забезпечення керування положенням прожектора гелікоптера за азимутом та кутом місця необхідно щоб він конструктивно був закріплений на вилці та приводиться в рух за допомогою двох виконуючих пристроїв. Прикладом аналога такої системи є DBL ZENALPHA K400, зовнішній вигляд якої наведено на рисунку 1.1 [1].

Рисунок 1.1 – Зовнішній вигляд DBL ZENALPHA K400
Для отримання ПФ ОК необхідно побудувати кінематичну схему вилки з урахування двигунів і прожектора та використовуючи кінематичну схему скласти математичну модель для кожного з каналів керування. Отримана кінематична схема системи наведена на рисунку 1.2.
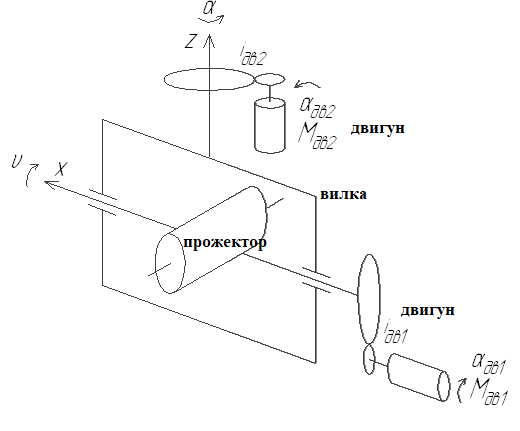
Рисунок 1.2 – Кінематичне схема системи
Відомо, що для отримання математичної моделі, котра описує кінематику систем використовуються рівняння Лагранжа (1.1) [2].
![]() (1.1)
(1.1)
де
![]() –
кінетична енергія усіх об’єктів системи;
–
кінетична енергія усіх об’єктів системи;
![]() –
сила інерції відносно узагальненої
координати;
–
сила інерції відносно узагальненої
координати;
![]() –
швидкість відносно узагальненої
координати;
–
швидкість відносно узагальненої
координати;
![]() –
узагальнена координата.
–
узагальнена координата.
Використовуючи (1.1) та кінематичну схему системи (див. рис. 1.2) отримано математичну модель ОК згідно до (1.2) – (1.3).
![]() .
(1.2)
.
(1.2)
де α – кутова швидкість руху навколо Z (див. рис 1.2);
![]() –
передавальне відношення виконуючого
приладу;
–
передавальне відношення виконуючого
приладу;
![]() –
момент інерції виконуючого приладу;
–
момент інерції виконуючого приладу;
![]() –
маса виконуючого приладу;
–
маса виконуючого приладу;
![]() –
відстань від центру мас першого
виконуючого пристрою до осі
Z;
–
відстань від центру мас першого
виконуючого пристрою до осі
Z;
![]() – радіус прожектора;
– радіус прожектора;
![]() –
довжина прожектора;
–
довжина прожектора;
![]() –
маса прожектора;
–
маса прожектора;
∆Mдв – крутний момент виконуючого пристрою.
 . (1.3)
. (1.3)
де – передавальне відношення виконуючого приладу;
![]() –
загальна кутова швидкість
навколо
осі x
(див. рис 2.1);
–
загальна кутова швидкість
навколо
осі x
(див. рис 2.1);
– момент інерції виконуючого приладу;
– радіус прожектора;
– довжина прожектора;
– маса прожектора;
∆Mдв – крутний момент виконуючого пристрою.
Для подальшого використання у системах моделювання отримані диференціальні рівняння (1.2) – (1.3) необхідно перевести в операторну форму. Найпоширенішим методом перетворення диференційних рівнянь в операторну форму є перетворення Лапласа (1.4) [3].
![]() . (1.4)
. (1.4)
Застосувавши формулу перетворення Лапласа (1.4) до диференціального рівняння (1.2) отримаємо ПФ двигуна вилки за азимутом (1.5), та запишемо (1.5) відносно кута повороту за азимутом згідно до (1.6).
![]() .
(1.5)
.
(1.5)
![]() .
(1.6)
.
(1.6)
Аналогічним чином, переведемо (1.3) до операторної форми згідно до (1.7), та запишемо (1.7) відносно кута повороту за кутом місця згідно до (1.8).
![]() (1.7)
(1.7)
![]() .
(1.8)
.
(1.8)
Використовуючи (1.6) та (1.8) отримано загальну структурну схему ОК (див рис. 1.3). Слід зауважити, що для обох каналів керування структурна схема буде однаковою.

Рисунок 1.3 – Загальна структурна схема ОК
Останнім етапом розробки САК є вибір виконуючих пристроїв та врахування їх параметрів у загальній структурній схемі моделі адаптивної системи.
Відомо, що на кожному літальному апараті є постійне джерело струму, через це є доцільним використовувати у якості виконуючих пристроїв двигуни постійного струму [4]. Більш того, двигуни постійного струму мають необхідні переваги для САК бортовим прожектором порівнюючи з іншими виконуючими пристроями, а саме:
– менші габаритні розміри;
– більш швидкий пуск;
– плавне керування швидкості обертання.
Виходячи з вищезазначеного, обрали наступні виконуючи пристрої:
– ДПМ-25-Н1-04 для каналу керування за азимутом [5];
– ДПМ-25-Н1-07 для каналу керування за кутом місця [6].
Використовуючи технічну документацію на ДПМ-25-Н1-04, ДПМ-25-Н1-07 та структурну схему (див. рис. 1.3) отримали ПФ каналів керування за азимутом та кутом місяця відповідно (див. рис. 1.4 – 1.5).
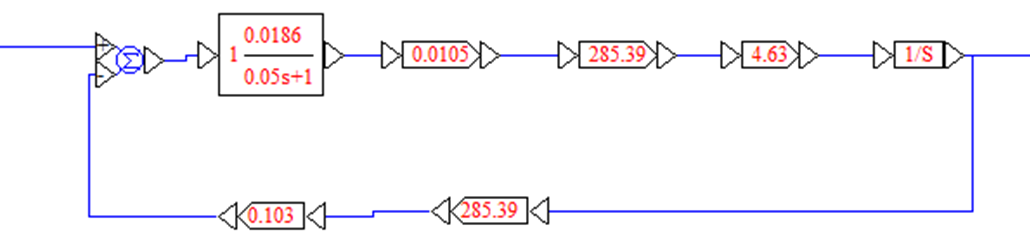
Рисунок 1.4 – Математична модель каналу керування за азимутом
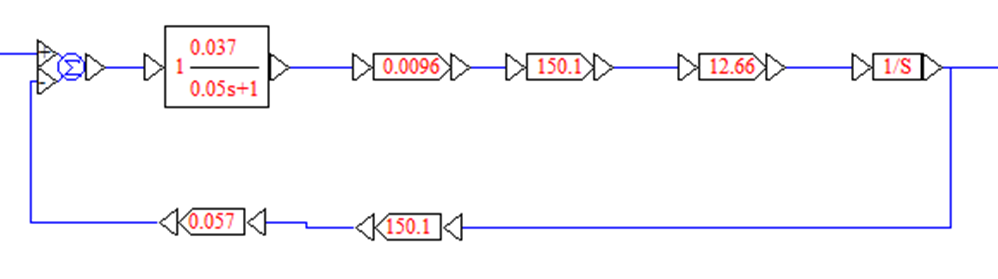
Рисунок 1.5 – Математична модель каналу керування за кутом місця
Слід зазначити, що більш детальне обґрунтування вибору виконуючих пристроїв та отримання диференціальних рівнянь (1.2) – (1.3) наведено у моєї атестаційній роботі бакалавра.
1.2 Аналіз математичної моделі САК положенням бортового прожектора з жорстким (неадаптивним) законом керування
Отримавши ПФ ОК, наступним етапом є побудова загальної структурної схеми САК. У нашому випадку основними блоками структурної схеми САК є:
– ПФ регулятора;
– ПФ двигуна вилки;
– ПФ датчика кута.
Слід зауважити, що для САК бортовим прожектором гелікоптера необхідно два канали керування за азимутом та кутом місця відповідно. Загальна структурна схема САК бортовим прожектором наведена на рисунку 1.6.
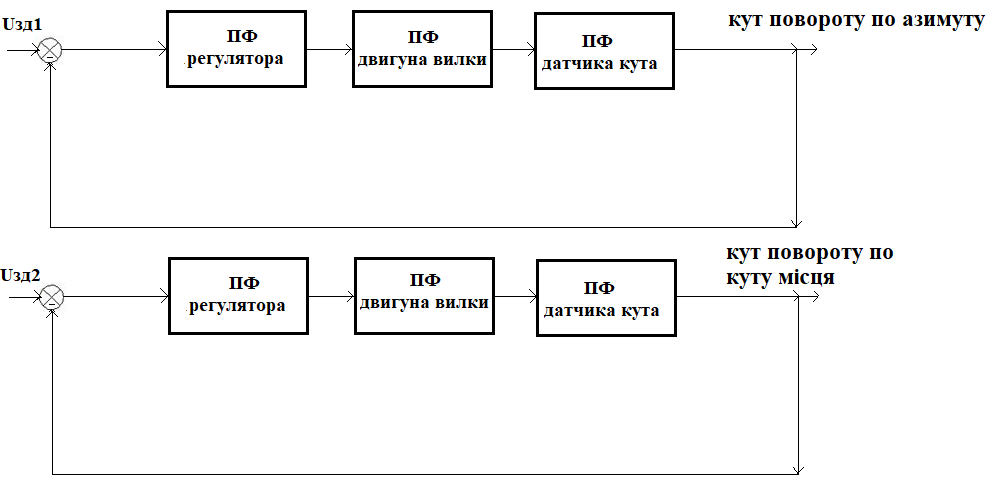
Рисунок 1.6 – Загальна структурна схема САК бортовим прожектором
Після визначення загальної структурної схеми (див. рис 1.6) необхідно визначите ПФ кожного елемента структурної схеми. ПФ двигуна вилки, для кожного каналу, була визначена при аналізі ОК у підрозділі 1.1. Для визначення ПФ датчика кута обрали потенціометричний датчик Bogus 1400, через те що йому притаманні такі переваги, як дуже низька нелінійність та міцний стопорний механізм [7]. З технічної документації на Bogus 1400 отримали ПФ датчика кута згідно до (1.9). Важливо підкреслити, що для обох каналів керування обрано однаковий датчик.
![]() (1.9)
(1.9)
Підставивши ПФ датчика кута та ПФ двигуна вилки в загальну структурну схему (див. рис 1.6) отримано математичку модель САК без регуляторів для кожного з каналів керування. Математична модель каналів керування за азимутом та кутом місця без регуляторів наведена на рисунку 1.7.
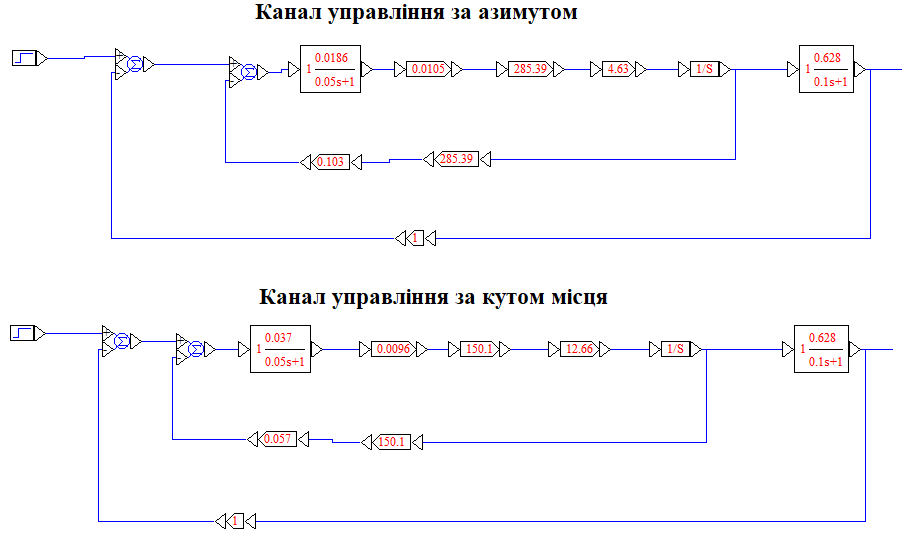
Рисунок 1.7 – Математична модель каналів керування за азимутом та кутом місця без регуляторів
Отриману математичну модель (див. рис .1.7) доцільно спростити використовуючи правила перетворення структурних схем САК, які наведено на рисунку 1.8 [6]. Спрощена математична модель наведена на рисунку 1.9.
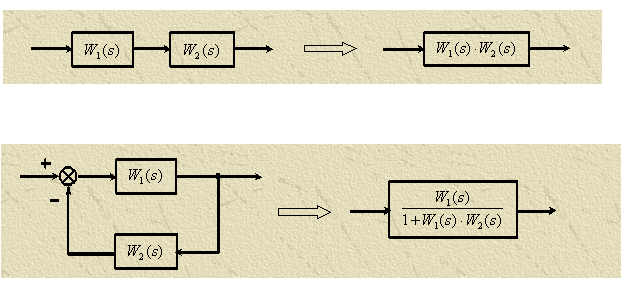
Рисунок 1.8 – Правила перетворення структурних схем САК
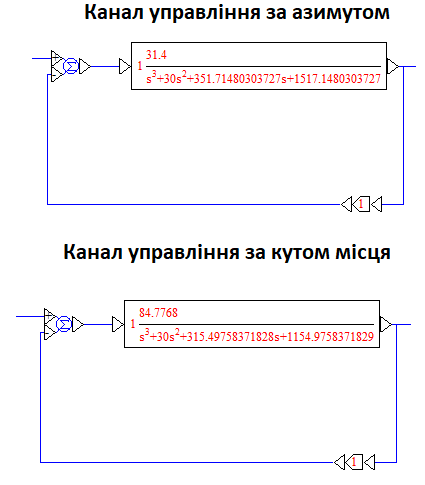
Рисунок 1.9 – Спрощена математична модель САК без регуляторів
Аналіз якості керування отриманої математичної моделі показав незадовільні результати, а саме те, що похибка в сталому режимі у каналі керування за кутом місця становить 92%, а у каналі керування за азимутом 97%. Це означає, що таке система потребує регулятор для корегування перехідної характеристики САК. Оцінена якість керування каналу керування за азимутом наведена у таблиці 1.1, перехідна характеристика (ПХ), нулі та полюса, ЛАЧХ та ЛФЧХ наведені на рисунках 1.10 – 1.12. Показник стійкості та коливальності розраховано згідно до (1.10) – (1.11).
![]() (1.10)
(1.10)
![]() (1.11)
(1.11)
Таблиця 1.1 – Якість керування каналу регулювання за азимутом
-
№
п/п
Параметр якості керування
Значення
1.
Похибка в сталому режимі, %
97
2.
Показник стійкості
9.7
3.
Показник коливальності
0.75
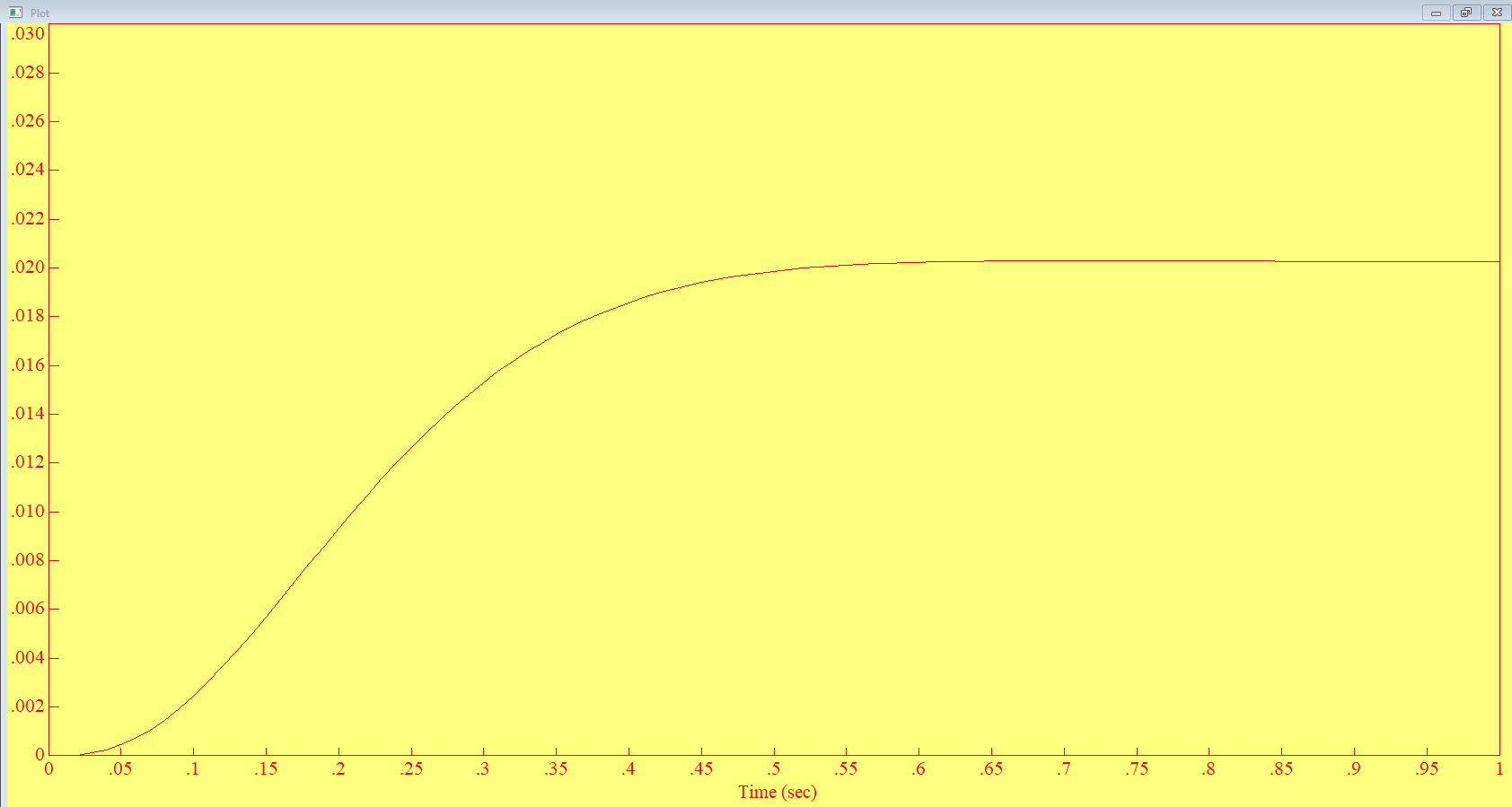
Рисунок 1.10 – ПХ каналу керування за азимутом бортового прозектора

Рисунок 1.11 – ЛАЧХ та ЛФЧХ каналу керування за азимутом

Рисунок 1.12 – Нулі та полюса каналу керування за азимутом
Оцінена якість керування каналу керування за кутом місця наведена у таблиці 1.2, перехідна характеристика, нулі та полюса, ЛАЧХ та ЛФЧХ наведені на рисунках 1.13 – 1.15. Показник стійкості та коливальності розраховано відповідно до виразів (1.12) – (1.13).
![]() (1.12)
(1.12)
![]() (1.13)
(1.13)
Таблиця 1.2 – Якість керування каналу регулювання за кутом місця
-
№
п/п
Параметр якості керування
Значення
1.
Похибка в сталому режимі, %
92
2.
Показник стійкості
8.4
3.
Показник коливальності
0.55
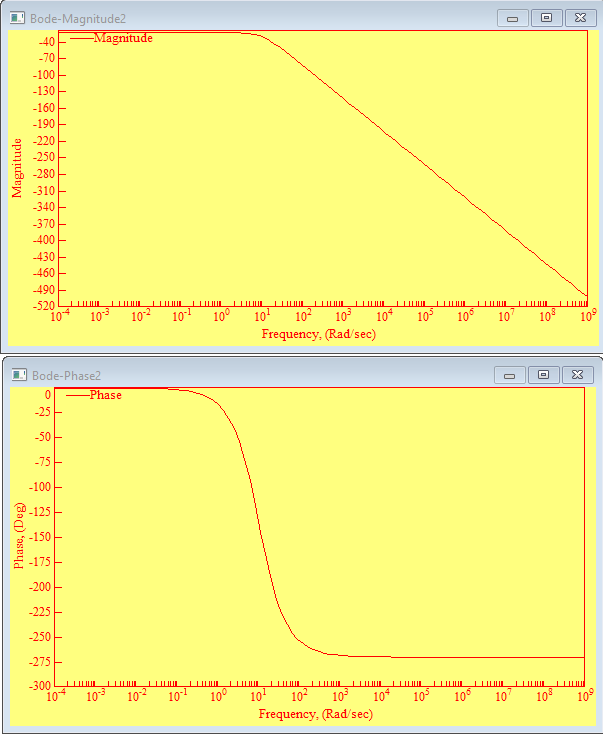
Рисунок 1.13 – ЛАЧХ та ЛФЧХ каналу керування за кутом місця

Рисунок 1.14 – ПХ каналу керування за кутом місця
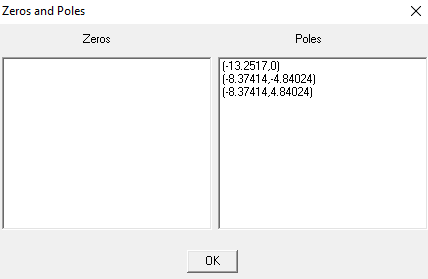
Рисунок 1.15 – Нулі та полюса каналу керування за кутом місця
Для корегування перехідної характеристики САК застосовано жорсткий закон керування, а саме ПІД закон керування (1.14). Такий регулятор складається з трьох складових: пропорційної, інтегральної та диференціальної. Керуючий сигнал формується, як сума трьох значень, помножених кожна на відповідний коефіцієнт [8]. Структурна схема ПІД регулятора наведена на рисунку 1.16.
![]() (1.14)
(1.14)
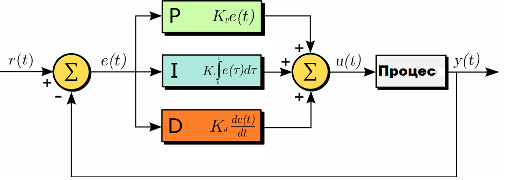
Рисунок 1.16 – Структурна схема моделі ПІД регулятора
Пропорційна складова залежить лише від різниці між вхідним сигналом та вихідним відгуком. Така різниця називається сигналом помилки. Пропорційний коефіцієнт підсилення визначає відношення вихідного відгуку до сигналу помилки. Наприклад, якщо сигнал помилки має величину 10, пропорційний коефіцієнт 5 дасть пропорційну відповідь 50. В цілому, збільшення пропорційного посилення збільшить швидкість реакції САК. Однак, якщо пропорційне посилення занадто велике, вихідний відгук почне коливатися. Більш того, якщо додатково збільшити пропорційну складову, то коливання стануть більшими, а система стане нестабільною і навіть може перейти у режим автоколивань.
Інтегральна складова підсумовує сигнал помилки з плином часу. Результатом є те, що навіть невеликий сигнал помилки призведе до повільного збільшення інтегральної складової. Інтегральна відповідь буде постійно збільшуватися з плином часу (якщо помилка не дорівнює нулю), тому ефект регулювання полягає в тому, щоб зменшити стаціонарну помилку до нуля.
Диференціальна складова являє собою різницю поточного і попереднього значення сигналу помилки, поділену на час між вимірами, тобто на dt. Інакше кажучи – це похідна від помилки за часом. Збільшення параметра диференціальної складової призведе до того, що система керування реагуватиме сильніше на зміни сигналу помилки та збільшить швидкість загальної реакції САК. Більшість САК використовують дуже малий час похідної, оскільки похідна відповідь дуже чутлива до шуму в сигналі помилки. Якщо сигнал зворотного зв'язку датчика зашумлений або якщо швидкість контуру керування занадто повільна, відповідь похідної може зробити систему керування нестабільною, та призвести систему до режиму автоколивання.
Відомо, що для налаштуванням ПІД-регулятора (визначення коефіцієнтів) використовують методи чисельної оптимізації з критерієм оптимізації – мінімальна площа похибки [9]. Функцією ціни можуть бути наступними:
– інтеграл модуля від сигналу помилки (1.15);
– інтеграл від сигналу помилки у квадраті (1.16).
![]() (1.15)
(1.15)
![]() (1.16)
(1.16)
Модель для проведення оптимізації наведена на рисунку 1.17. Слід зазначити, що модель для проведення оптимізації однакова для обох каналів керування. Реалізації функції ціни (1.15) – (1.16) наведені на рисунках 1.18 – 1.19 відповідно.

Рисунок 1.17 – Схема моделі для проведення оптимізації

Рисунок 1.18 – Схема реалізація функції ціни за формулою (1.15)

Рисунок 1.19 – Схема реалізація функції ціни за формулою (1.16)
Аналізуючи отримані перехідні характеристики після оптимізації можна зробити висновок, що функція ціни (1.16) не є оптимальною і показує незадовільну якість керування (див рис. 1.20), через це була використана функція ціни (1.15). Отримані коефіцієнти методом чисельної оптимізації при функції ціни (1.15) наведені у таблиці 1.3.
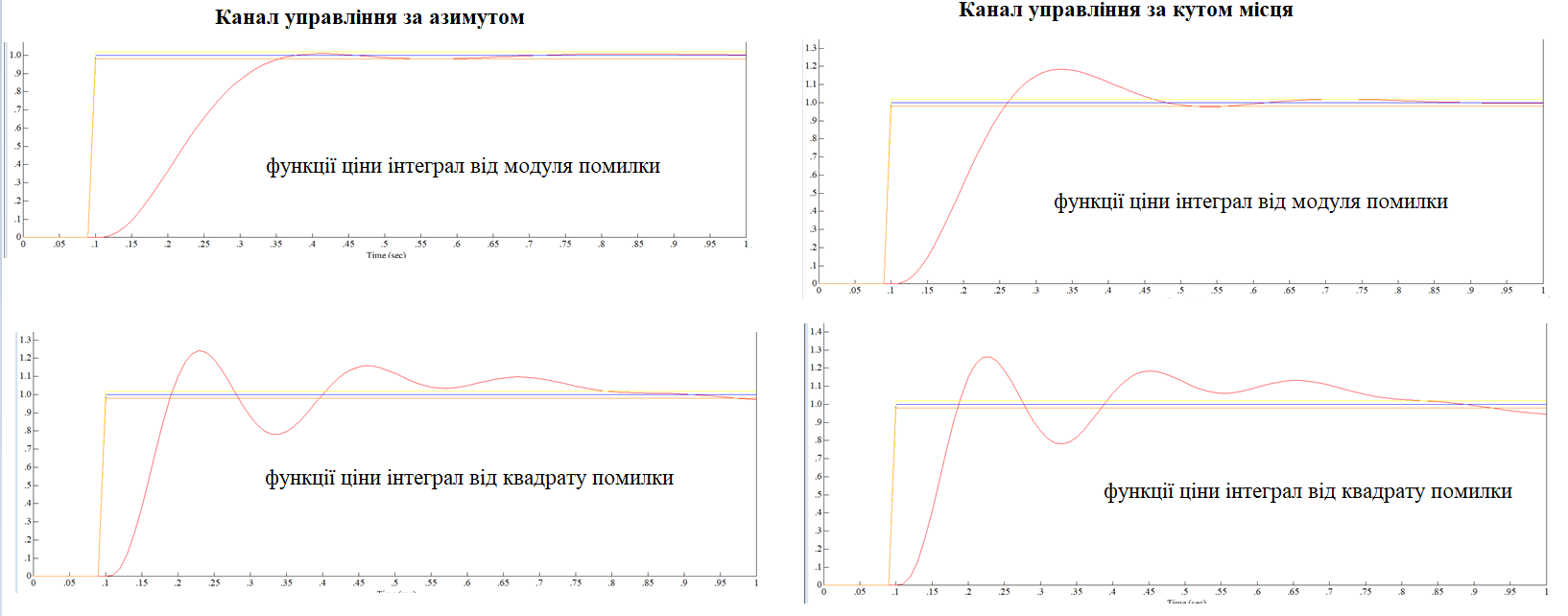
Рисунок 1.20 – ПХ обох каналів керування після оптимального налаштування ПІД-регуляторів САК
Таблиця 1.3 – Коефіцієнти ПІД регулятора для обох каналів керування
-
№
п/п
Коефіцієнт
ПІД регулятора
Канал керування за азимутом
Канал керування за кутом місця
1.
Пропорційний
67.6
35.3
2.
Інтегральний
363.7
185
3.
Дифернціальний
2.2
1.3
Оцінена якість керування каналу керування за азимутом з ПІД регулятором наведена у таблиці 1.4, перехідна характеристика, нулі та полюса, ЛАЧХ та ЛФЧХ наведені на рисунках 1.21 – 1.23.. Показник стійкості та коливальності розраховано згідно до (1.17) – (1.18).
![]() (1.17)
(1.17)
![]() (1.18)
(1.18)
Таблиця 1.4 – Якість керування каналу регулювання за азимутом з ПІД-регулятором
№ п/п |
Параметр |
Значення |
1. |
Запас стійкості по амплітуді, dB |
17 |
2. |
Запас стійкості по фазі,° |
21 |
3. |
Час регулювання, сек |
0.65 |
4. |
Перерегулювання, % |
28.2 |
5. |
Похибка у сталому режимі, % |
0.0002 |
6. |
Показник стійкості системи |
4.9 |
7. |
Показник коливальності |
2.7 |
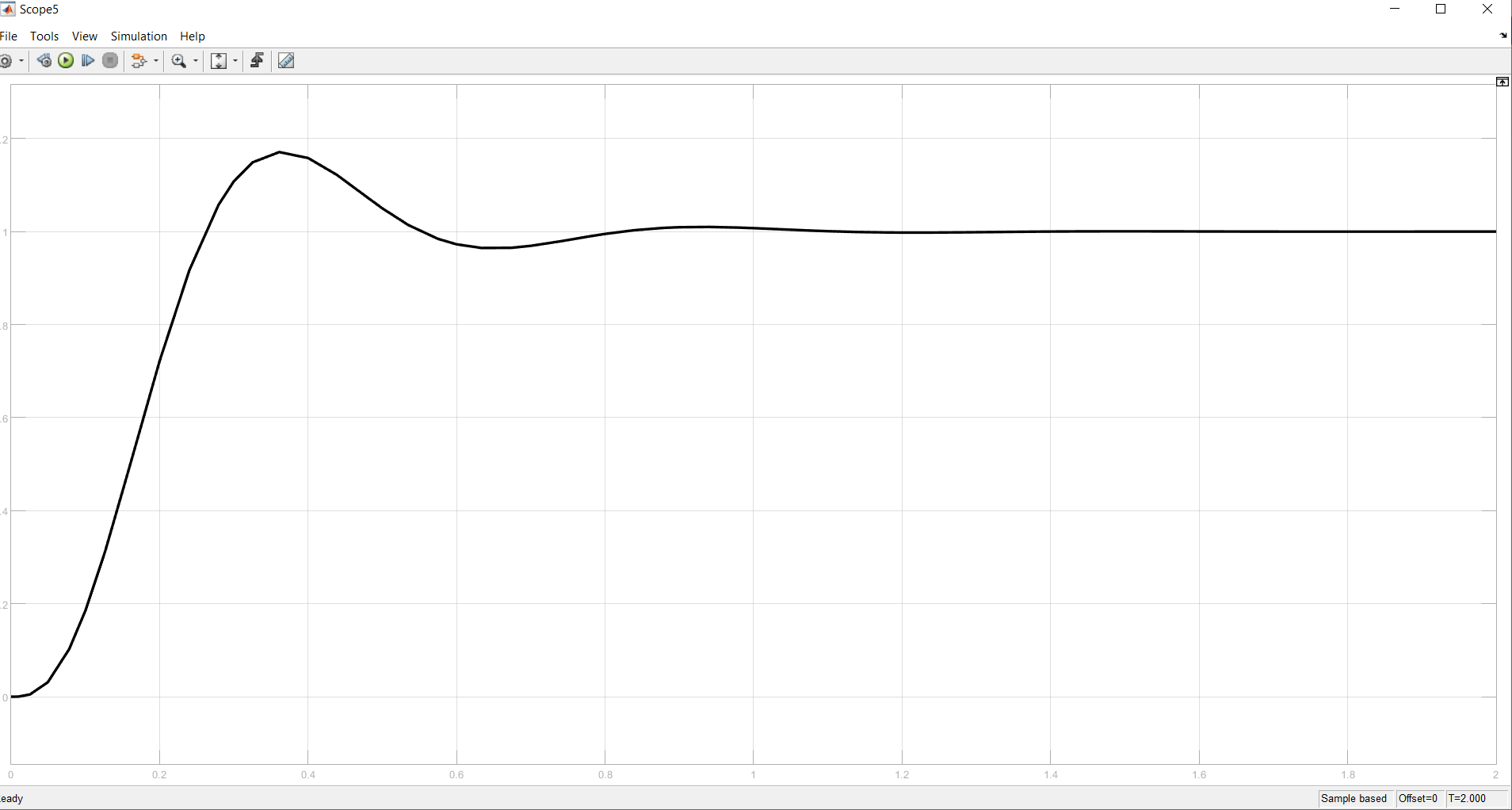
Рисунок 1.21 – Перехідна характеристика каналу керування
за азимутом САК з ПІД-регулятором

Рисунок 1.22 – ЛАЧХ&ЛФЧХ каналу регулювання за азимутом
САК з ПІД-регулятором
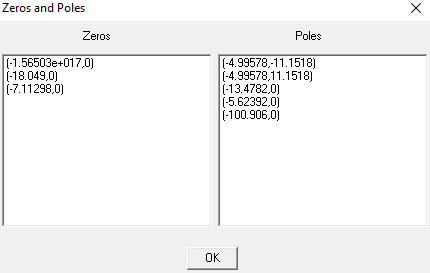
Рисунок 1.23 – Нулі та полюси ПФ каналу регулювання за азимутом
САК з ПІД-регулятором
Оцінена якість керування каналу керування за кутом місця з ПІД регулятором наведена у таблиці 1.5, перехідна характеристика, нулі та полюса, ЛАЧХ та ЛФЧХ наведені на рисунках 1.24 – 1.26. Показник стійкості та коливальності розраховано згідно до (1.19) – (1.20).
![]() (1.19)
(1.19)
![]() (1.20)
(1.20)
Таблиця 1.5 – Якість керування каналу регулювання за кутом місця з ПІД-регулятором
№ п/п |
Параметр |
Значення |
1. |
Запас стійкості по амплітуді, dB |
19 |
2. |
Запас стійкості по фазі, ° |
19 |
3. |
Час регулювання, сек |
0.68 |
4. |
Перерегулювання, % |
22 |
5. |
Похибка у сталому режимі, % |
0.0002 |
6. |
Показник стійкості системи |
4.0 |
7. |
Показник коливальності |
3.0 |

Рисунок 1.24 – Перехідна характеристика каналу керування
за кутом місця САК з ПІД-регулятором

Рисунок 1.25 – ЛАЧХ та ЛФЧХ каналу регулювання за кутом місця
САК з ПІД-регулятором

Рисунок 1.26 – Нулі та полюси ПФ другого каналу регулювання за кутом місця САК з ПІД-регулятором
Таким чином, отримана математична модель САК положенням (за азимутом та кутом місця) бортового прожектора з жорстким ПІД-законом керування. Таку модель можна використовувати у якості основи для побудови моделей з використанням інтелектуальних методів у якості адаптера для налаштування жорсткого ПІД-закону керування.
1.3 Загальний аналіз існуючих інтелектуальних методів адаптивного автоматичного керування
Інтерес до інтелектуальних систем керування обумовлюється цілим рядом причин. Перша з них полягає в тому, що традиційні технології вже не в змозі забезпечити необхідного підвищення якості керування, оскільки не враховують всіх невизначеностей, які впливають на систему. Спроба вдосконалення відомих алгоритмів адаптивного керування не завжди дає бажаний результат. Це пояснюється як складністю самих алгоритмів, так і складністю їх реалізації на цифрову техніку з урахуванням умови забезпечення стійкості дискретної системи керування [10].
До інтелектуального керування відносять:
– методи нечіткої логіки;
– генетичні алгоритми та ШНМ.
Область застосування методів ШНМ та нечіткої логіки наведено на рисунку 1.27.

Рисунок 1.27 – Область застосування інтелектуальних САК
У статті [11] розглядається застосування нечіткої логіки у якості адаптера для ПІД регулятора. Відзначається здатність нечіткого регулятора враховувати обмеження і правила, що важко формалізуються.
У статті [12] розглядається застосування нечіткої логіки у якості регулятора. Відзначається важкість формулювання бази правил та проведення процесу фазифікації. Більш того, автор наголошує, що доцільніше використовувати методи нечіткої логіки у якості адаптера.
У статті [13] описано застосування ШНМ у якості адаптера ПІД регулятора для керування насосною станцією. Завданням керування є мінімізація сумарного енергоспоживання станції. Відзначається здатність нейронного регулятора враховувати обмеження і правила, що важко формалізуються, а також значне підвищення якості перехідних процесів.
У статті [14] розглянуто застування ШНМ у якості регулятора для керування двигуном постійного струму. У розглянутій системі нейронна мережу задає коефіцієнт швидкості адаптації. Відзначається значне підвищення якості перехідних процесів. Автор наголошує на важкість отримання навчальної вибірки.
Виходячи з вищезазначеного, можна зробити висновок щодо доцільності використання інтелектуальних методів в адаптивній САК положенням бортового прожектора гелікоптера. Так, недоцільно використовувати методи нечіткої логіки або нейронних мереж у якості регулятора (прямі методи) через складність їх налаштування, тобто складність процесу фазифікації, складання бази правил для методу нечіткої логіки та складність отримання навчальної вибірки для методу нейронних мереж, але є доцільним використовувати у якості адаптера для ПІД закона керування, через наявність детальних досліджень впливання кожного коефіцієнта (дає можливість скласти базу правил), наявності реалізації методів чисельної оптимізації коефіцієнтів ПІД регулятора у таких пакетах моделювання, як MatLab Simulink, VisSim (дає можливість легко отримати навчальну вибірку).
1.3.1 Аналіз методу нечіткої логіки в адаптивному автоматичному керування
Теорія нечітких множин має справу з "людськими знаннями", які прийнято називати експертною інформацією. Характерним для нечіткого керування є безпосереднє застосування експертних знань для генерування керуючих впливів на ОК, тобто знань експерта про взаємодію регулятора з ОК (процесом), котрі подаються у формі правил виду: ЯКЩО (початкова ситуація), ТО (відповідна реакція). Слід зазначити, що таку систему прийнято називати системою нечіткого висновку [15].
Поняття нечіткого висновку займає центральне місце у нечіткій логікі та теорії нечіткого керування. Система нечіткого висновку - це процес отримання нечітких висновків про необхідні вихідні реакції регулятора на об’єкт керування на основі нечітких умов або передумов.
Розробка та застосування систем нечіткого висновку включає ряд етапів, реалізація яких виконується на основі положень нечіткої логіки (див. рис 1.28).
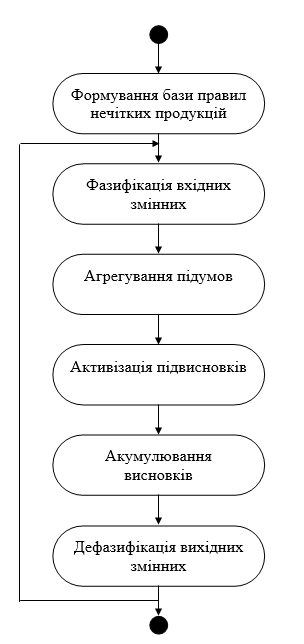
Рисунок 1.28 – Загальний алгоритм нечіткого висновку
База правил системи нечіткого висновку призначена для формального подання емпіричних знань експертів в тій чи іншій проблемній області та являє собою кінцеву сукупність нечітких правил продукції, узгоджену щодо лінгвістичних змінних. Таким чином, для формування бази правил потрібен експерт, а краще група експертів, яка на основі власного досвіду визначить правила для керування системою на основі аналізу вхідних та вихідних даних [16].
Мета фазифікації є встановлення відповідності між конкретним, зазвичай чисельним, значенням окремої вхідної змінної системи нечіткого виведення і значенням функції приналежності відповідного їй терма вхідної лінгвістичної змінної. Після завершення цього етапу для всіх вхідних змінних повинні бути визначені конкретні значення функцій приналежності по кожному з лінгвістичних термів, які використовуються в умові бази правил системи нечіткого виведення.
Мета агрегування полягає в об'єднанні всіх ступенів істинності підвисновків для отримання функції належності кожної з вихідних змінних. Результат агрегування для кожної вихідної лінгвістичної змінної визначається як об'єднання нечітких множин всіх підвисновків нечіткої бази правил щодо відповідної лінгвістичної змінної.
Мета активізації є знаходження ступеня істинності кожного з підвисновків правил нечітких продукцій.
Мета акумуляції полягає в тому, щоб об'єднати або акумулювати всі ступені істинності висновків (підвисновків) для отримання функції належності кожної вихідних змінних. Причина необхідності виконання цього етапу полягає в тому, що одна й таж вихідна лінгвістичної змінна, належать різним правилам системи нечіткого висновку
Мета дефаззифікації полягає в тому, щоб, використовуючи результати акумуляції всіх вихідних лінгвістичних змінних, отримати кількісні значення для кожної вихідної змінної, яке використовується зовнішніми по відношенню до системи нечіткого виведення пристроями (виконавчими механізмами інтелектуальної САК).
Перехід від отриманої в результаті акумуляції функції приналежності вихідний лінгвістичної змінної до чисельним значенням y вихідної змінної проводиться одним з наступних методів [17]:
– метод центру максимуму, при якому вихідна величина є середнім значенням величини, отриманої через обчислені ступеня приналежності;
– метод найбільшого значення, при якому вибирається найбільше значення з отриманих;
– метод центроїда, при якому значення вихідної величини є координатою центра ваги фігури, одержуваної урізанням характеристичних функцій вихідної величини та отриманими значеннями їх ступенів належності.
У статті [18] проведено порівняння різних алгоритмів нечіткого висновку, таких як алгоритм Мамдані, Сугено, Ларсона. Відзначається, що для САК, котрі потребують адаптації у реальному часі має сенс використовувати алгоритм Мамдані. Приклад роботи алгоритма Мамдані наведено на рисунку 1.29.
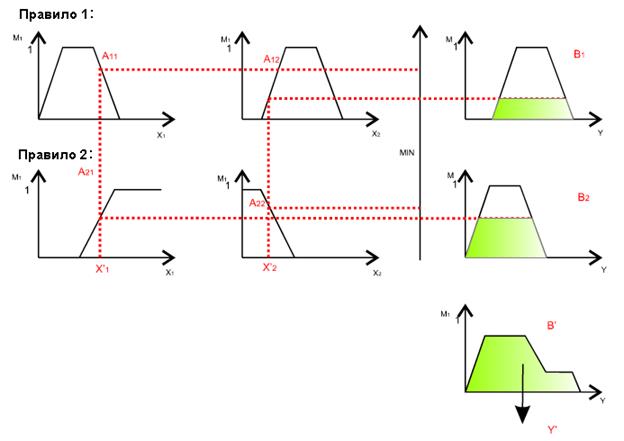
Рисунок 1.29 – Приклад роботи алгоритму Мамдані
Стосовно функцій належності. У цій роботі для розробки системи на основі нечіткої логіки обрані T (1.21) та S функції (1.22) належності, через те що, вони більш поширені та загальноприйняті, що дозволяє проводити дослідження нечітких систем різних програмних засобах. Графік функцій належності T та S наведено на рисунках (1.30) – (1.31) відповідно [19].
 (1.21)
(1.21)
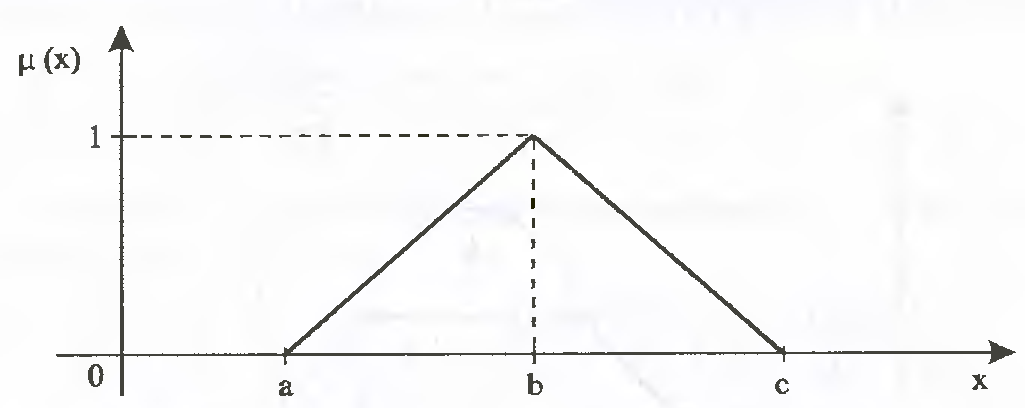
Рисунок 1.30 – Функція належності класу Т
 (1.22)
(1.22)

Рисунок 1.31 – Функція належності класу S
Таким чином, для використання нечіткого висновку у якості інтелектуального регулятора САК необхідно:
– отримати лінгвістичні вхідні та вихідні лінгвістичні змінні;
– провести фазифікацію лінгвістичних змінних;
– скласти базу правил продукції;
– використати алгоритм нечіткого висновку (Мамдані, Сугено);
1.3.2 Аналіз методу нейромереж в адаптивному автоматичному керування
Штучні нейроні мережі (ШНМ) використовують для моделювання процесів, котрі відповідають процесам у біологічних нейромежах (живих клітинах), а також для вирішення широкого спектру задач, таких як: класифікація, розпізнавання образів, апроксимація функцій а також ШНМ використовують у якості інтелектуального регулятора у САК.
Застосування ШНМ у якості інтелектуального регулятора є доцільним, коли важко зробити математичний опис ОК. У такому випадку ОК розглядається як чорна або сіра скринька, до якої відомі реакції відповіді на обмежену кількість вхідних сигналів (в обмеженому діапазоні). Перевагою нейронних мереж у таких випадках є їх здатність до інтерполяції та екстраполяції та виявлення загальних закономірностей [20].
У загальному вигляді ШНМ складається з послідовності нейронів, поєднаних між собою синапсами. Нейрон є найпростіша структурно-функціональна одиниця нейромережі, яка забезпечує зберігання, обробку та передачу інформацію. Біологічний нейрон складається з соматичної клітини, безлічі коротких розгалужених відростків (дендритів) та одного довгого відростка (аксон). За допомогою дендритів здійснюється прийом сигналів, аксон передає інформацію іншим нейронам чи виконавчим органам. У штучній моделі нейрона (1.23) дендрити представлені входами з ваговими коефіцієнтами. Виходи вхідного шару підсумовуються зі зміщенням нейрона (bias нейрона) і надходять на вхід функції активації, що імітує обурення нейрона [21].
у
= F (b +
![]() ),
(1.23)
),
(1.23)
де F(x) – функція активації
b – початковий зсув;
n – кількість входів;
wi - вага i-го входу.
Як функцію активації, як правило, використовують різні нелінійні і рідше лінійні функції. Види функцій активації наведені на рисунку 1.32.

Рисунок 1.32 – Види функцій активації
Найпоширенішою функціє є сигмоїдальна (див. рис. 1.32). Така функція має вибіркову чутливість до вхідних сигналів різної інтенсивності, що відповідає реальній поведінці біологічного нейрона. Найбільша чутливість до зміни входу спостерігається поблизу порога. Недоліком сигмоїди є те, що при крайніх і малих значення входу функція не чутлива, так як похідна такої функції прагне до нуля.
Щоб подолати цей недолік, використовується багатошаровий перцептор Розенблатта. На нижчих рівнях такої нейронної мережі вхідні сигнали перетворюються таким чином, щоб сформувалися лінійно розділені множини, які будуть оброблені наступними шарами мережі [22]. Схематичне зображення багатошарового перцептрона Розенблатта наведено на рисунку 1.33.
Слід зауважити, що існує безліч інших видів нейронних мереж, наприклад таких як мережі Кохонена або згорткові мережі, але вони застосовуються для класифікації або кластеризації і не доцільно використовувати такі ШНМ у якості інтелектуального регулятора.
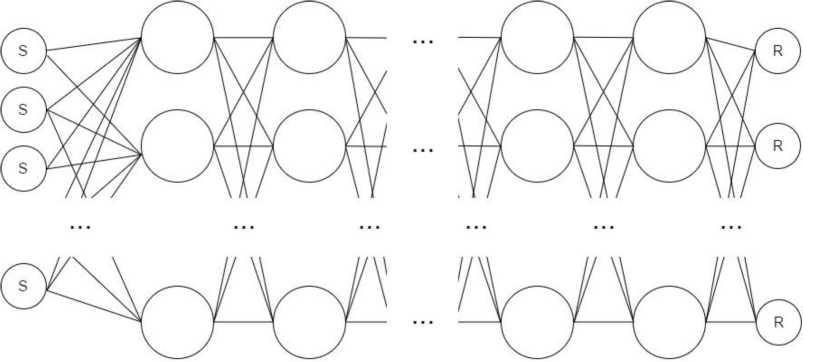
Рисунок 1.33 – Багатошаровий перцептор Розенблатта
Відомо, що процес навчання ШНМ полягає у підстроюванні вагових коефіцієнтів мережі таким чином, щоб виконувався певний критерій. Алгоритми навчання ШНМ поділяють на навчання з вчителем та без вчителя.
Під час навчання без вчителя навчальна вибірка складається лише з вхідних впливів. Завдання нейронної мережі полягає у формуванні однорідних сигналів на подібні вхідні сигнали тобто, виконується завдання кластеризації. Слід зауважити, що алгоритми навчання без вчителя не використовуються при навчанні нейронної мережі, яка буде використовуватися у якості інтелектуального регулятора.
У навчанні з вчителем передбачається наявність деякої системи вчителя, яка повідомляє нейронну мережу про коректність її реакцій на задані вхідні сигнали, тобто мережі надається навчальна вибірка із вхідними впливами та необхідними реакціями. На основі отриманих даних нейронна мережа коригує свої вагові коефіцієнти.
Одним із найпоширеніших методів навчання багатошарового перцептрона є метод зворотного поширення помилки. Цей метод належить до групи методів навчання з вчителем. Суть методу полягає у вирішенні задачі оптимізації, а саме пошуку глобального мінімуму помилки мережі у просторі всіх вагових коефіцієнтів за допомогою методу градієнтного спуску [23, 24].
Першим кроком алгоритма зворотного поширення помилки є ініціалізація всіх вагових коефіцієнтів деякими малими випадковими значеннями.
Кожен нейрон вхідного шару отримує значення вхідного вектору навчальної вибірки (1.24) і передає його на нейрони прихованого шару, в результаті нейрони формують вихідну реакцію у вигляді зваженої суми і застосовують функцію активації (1.25).
XJ out = Xj (1.24)
Zj
out
= F
(v0j
+ ![]() (1.25)
(1.25)
Кожен вихідний нейрон також формує вихідну реакцію згідно до (1.26).
Yk
out
= F(voj
+![]() (1.26)
(1.26)
Оцінка помилки нейронної мережі для поточної пари вхідного та вихідного векторів розраховується згідно до виразу (1.27):
![]() 2
(1.28)
2
(1.28)
Для мінімізації цієї помилки необхідно вирішити оптимізаційну задачу пошуку мінімуму. Для цього розраховується похідна даної помилки по виходу нейронної мережі згідно до (1.29). Похідна помилки прихованого шару розраховуються згідно (1.30).
![]() (1.29)
(1.29)
![]() 2=
2=
![]() (1.30)
(1.30)
Далі визнається похідна помилки ШНМ відносно ваги зав’язків нейронів вихідного шару згідно до (1.31).
![]() (1.31)
(1.31)
Для мінімізації цільової функції помилки необхідно зробити крок у бік зменшення градієнта цільової функції відносно кожної приватної похідної. Це можна зробити шляхом зміни значень ваги між нейронами згідно до (1.32) – (1.33).
![]() (1.32)
(1.32)
![]() (1.33)
(1.33)
Послідовність кроків (1.24) – (1.33) виконується для кожної пари елементів навчальної вибірки. Одна ітерація навчання з урахуванням всіх елементів навчальної вибірки називається поколінням. Сумарна помилка в поколінні може бути визначена як сумарне середньоквадратичне відхилення згідно до (1.34).
 (1.34)
(1.34)
Навчання перцептрона триває доки не виконається один із критеріїв зупинки, а саме: не вийде час навчання, пройде певна кількість поколінь навчання або помилка за покоління не перевищить мінімально необхідного порогового значення.
Таким чином, під час навчання помилка передається від вихідного шару до зритих шарів, що відображено в назві методу. Недоліками методу є низька швидкість збіжності, небезпека потрапляння в локальний мінімум, а також небезпека появи ситуації, коли у ході навчання вагові коефіцієнти мережі можуть набути дуже великих значень, що фактично паралізує навчання.
Для протидії даним недолікам не виявлено точних методів тому, як правило, під час навчання використовуються наближені евристики, що залежать від завдань, які вирішує ШНМ.
Слід зауважити, що не є доцільним використовувати навчання нейронної мережі, послідовно подаючи пари впливів та вихідної реакції, тому що в такому випадку мережа не зможе визначити тимчасовий взаємозв'язок вхідних значень. Через це для представлення динамічних властивостей ОК використовують модель авторегресії (1.35) [25].
TDL
=  (1.35)
(1.35)
Таким чином, для використання методу ШНМ у якості інтелектуального регулятора САК необхідно:
– отримати навчальну вибірку;
– обрати структуру ШНМ та навчити нейрону мережу.
1.4 Постановка задач дослідження
Мета кваліфікаційної роботи – дослідження інтелектуальних методів адаптивного керування САК положенням (за азимутом та кутом місця) бортового прожектора гелікоптера.
Відповідно до мети кваліфікаційної роботи необхідно:
– проаналізувати конструктивні особливості та математичну модель ОК, а саме бортовий прожектор, котрий закріплено на вилці та приводиться в рух за допомогою виконуючих пристроїв за азимутом та кутом місця;
– проаналізувати математичну модель САК положенням бортовим прожектором гелікоптера з неадаптивним ПІД регулятором;
– проаналізувати інтелектуальні методи керування, а саме методи нечіткої логіки та методи нейронних мереж;
– розробити математичну модель адаптивної системи з використання нечіткої логіки для підлаштування коефіцієнтів ПІД регулятора в автоматичному керуванні положенням бортового прожектору гелікоптера;
– розробити математичну модель адаптивної системи з використанням нейронної мережі для підлаштування коефіцієнтів ПІД-регулятора в автоматичному керуванні положенням бортового прожектору гелікоптера;
– провести експериментальні дослідження моделей адаптивної САК положенням бортового прожектора при вхідному ступінчатому та трапецоїдному сигналі завдання;
– провести експериментальні дослідження щодо швидкодії адаптивної САК положенням бортового прожектора;
– провести експериментальні дослідження моделей адаптивної САК положенням бортового прожектора при випадковому збуренню.