

Зачет
.docx1.Электрической машиной
называют электромеханический, как правило, вращающийся преобразователь энергии. Преобразование основывается на взаимодействии индуктора, создающего магнитное поле, с витками обмотки электрической машины. В машинах постоянного тока индуктор (основные полюса) закрепляется на неподвижной части машины, а обмотка наматывается на вращающуюся часть (якорь). В синхронных машинах индуктор представляет собой вращающуюся часть (ротор), а обмотка укладывается в пазы неподвижного статора. При перемещении индуктора относительно обмотки в ней, на основе закона электромагнитной индукции, возникает ЭДС, а если обмотка замкнута, то и ток. С другой стороны, на вращающийся контур с током в магнитном поле действует момент силы. Если обмотка подключена к источнику питания, то в зависимости от соотношения напряжения на источнике и ЭДС индукции, машина может потреблять или производить электрическую энергию. Если машина потребляет электрическую энергию, то момент силы вращает ротор, производя механическую работу - машина работает в режиме двигателя. Если машина производит электрическую энергию из механической, то момент силы действует против вращающего момента первичного двигателя, создающего вращающий момент - машина работает в режиме генератора. Электрическая машина может работать как генератором, так и двигателем, называется принципом обратимости электрической машины.
Классификация по мощности: большой — несколько сотен мегаватт средней — более 10 кВт малой — 0,5 — 10 кВт микромашины — меньше 0,5 кВт
Классификация по частоте вращения: тихоходные - с частотами вращения до 300 об/мин; средней быстроходности - 300-1500 об/мин; быстроходные - 1500 - 6000 об/мин; сверхбыстроходные - свыше 6000 об/мин.
Потери Энергии и КПД: Преобразование энергии происходит вследствие взаимодействия трех физических процессов:
1.Механические
потери (
2.Магнитные
потери (
3.Электрические
потери(
4.Добавочные
(
Полные
потери представляет собой сумму
основных и добавочных. Величина этих
потерь определяет КПД:
Классификация электрических машин:
|
2.Законы, лежащие в основе принципа ЭМ
Закон электромагнитной индукции: е = dψ|dt = -w∙(dФ/ dt), е-мгновенное знач-е эдс, ψ- потокосцепление. Если проводник переем-ся в эл.поле и пересекает магнитно-силовые линии, то в нем наво- дится эдс, величина кот.определ-ся скоростью. Ψ = w∙Ф, е =[v∙B] ۬ ∙l v- вектор скорости, B- вектор магн. индук-и, l- длина проводника.
Закон Ампера: на проводник с током, помещенный в магн.поле действует сила, величина кот. пропорцион-а длине проводника, силе тока протекающ-й ч/з провод- к и индукц-ии магнит-го поля. dФ = [dl∙dB]∙I Правило Максвкла
правило правой руки: для определения напрвления эдс в проводнике, движущемся в магн.поле правую руку распологают таким об-м, чтобы магн.линии входили в ладонь, от- ставленный в сторону большой палец показ-л направление движ-я пр-ка относ-омагн.поля, тогда 4 выпрям-х пальца укажут направ-е эдс.
правило левой руки: чтобы опред-ь напрвл-е силы, действ-й на проводник с током, помещ. в магн. поле, лев.руку распол-т т.обр-м, чтобы магн.силов.линии входили в ладонь, 4 вы- прям-х пальца укажут направ-е тока в пров-е, тогда большой палец, отставленный в сторону покажет напр-е силы, действ-й на пров-к.
По првилу Максвела опред-т направ-е магн-х силовых линий поля.
правило правого винта: если правый винт поворачивать т.о. чтобы он поступат-о перем-я по направ-ю тока, то нарав-е вращения его головки будет совпадать с направ-м силовых ли- ний. |
3.Трансформатор
- это статическое электромагнитное устройство, предназначенное для преобразования переменного тока одного напряжения в переменный ток другого напряжения. С помощью трансформаторов можно изменять число фаз и преобразовывать частоту переменного тока. Трансформаторы широко используются для следующих целей: передачи и распределения электрической энергии (силовые трансформаторы); питания различных цепей теле- и радиоаппаратуры (радиотрансформаторы); включения измерительных приборов (измерительные трансформаторы); питания различных технологических установок (электросварочные, электропечные и т. д.). В данной главе будем ориентироваться на силовые трансформаторы, наиболее распространенный тип трансформаторов. Принцип действия трансформаторов, физику процессов в них и их схемы замещения рассмотрим на примере однофазных трансформаторов. Полученные при этом выводы будут справедливы и для трехфазных трансформаторов, а их специфические особенности отметим в конце главы. |
3.1. Электромагнитная схема однофазного двухобмоточного трансформатора.
Рассматриваемый
трансформатор, как видно из рис. 2.1,
состоит из двух обмоток, размещенных
на замкнутом ферромагнитном
магнитопроводе (сердечнике), позволяющем
усилить электромагнитную связь между
обмотками. Часть магнитопровода, на
которой расположена обмотка, называется
стержнем, а свободная от обмотки или
соединяющая два стержня - ярмом. Для
снижения потерь от вихревых токов,
обусловленных переменным потоком,
сердечник набирается из лакированных
листовэлектротехнической стали
толщиной 0,35-0,5 мм. Применение
электротехнических сталей с низкими
удельными потерями на перемагничивание
позволяет снизить потери на гистерезис,
второй вид потерь в магнитопроводе.
Где
Из
выражения (2.3) следует, что ЭДС, наведенная
синусоидальным потоком, отстает от
него по фазе на
Аналогичным
образом можно получить выражение для
действующего значения ЭДС, наведенной
основным потоком во вторичной обмотке:
Кроме
основного потока, намагничивающие
силы
Подводя итог вышесказанному, электромагнитное преобразование в трансформаторах можно изобразить следующей схемой:
ЭДС
рассеяния
Еще
раз следует подчеркнуть, что трансформатор
- это устройство переменного тока.
Если первичную обмотку подключить к
сети постоянного напряжения, то поток
в магнитопроводе будет постоянен и
по величине, и по направлению
|
 )-
обусловлены
силами трения в подшипниках,
вентиляционных потерь (потери на
трение частей машины о воздух и другие
потери, связанные с вентиляцией
машины).
)-
обусловлены
силами трения в подшипниках,
вентиляционных потерь (потери на
трение частей машины о воздух и другие
потери, связанные с вентиляцией
машины). )-
включают в себя потери на гистерезис
и вихревые токи, вызванные перемагничиванием
сердечников активной стали. Значение
этих потерь определяется качеством
(маркой) стали магнитопровода, толщиной
листов, способом шихтовки.
)-
включают в себя потери на гистерезис
и вихревые токи, вызванные перемагничиванием
сердечников активной стали. Значение
этих потерь определяется качеством
(маркой) стали магнитопровода, толщиной
листов, способом шихтовки. )
–
потери от токов, протекающих в обмотках.
На них влияет температура обмотки.
)
–
потери от токов, протекающих в обмотках.
На них влияет температура обмотки. )
– потери
обусловленные добавочными явлениями
при нагрузке.
)
– потери
обусловленные добавочными явлениями
при нагрузке.

 На
рис. 2.2 представлена наиболее
распространенная в силовых трансформаторах
шихтованная конструкция сердечника.
Для этой конструкции, с целью снижения
расхода стали, листы штампуются не
целиковыми по профилю магнитопровода,
а отдельными разновеликими прямоугольными
полосками, из которых собираются в
переплет стержни и ярма. При сборке
трансформатора, для насадки обмоток
на стержни необходимо расшихтовать
верхнее ярмо, а после насадки обмотки
- вновь его зашихтовать. Обмотка,
подключенная к питающей сети переменного
тока, называется первичной. Все
параметры первичной обмотки будем
обозначать с индексом 1, например,
число витков
На
рис. 2.2 представлена наиболее
распространенная в силовых трансформаторах
шихтованная конструкция сердечника.
Для этой конструкции, с целью снижения
расхода стали, листы штампуются не
целиковыми по профилю магнитопровода,
а отдельными разновеликими прямоугольными
полосками, из которых собираются в
переплет стержни и ярма. При сборке
трансформатора, для насадки обмоток
на стержни необходимо расшихтовать
верхнее ярмо, а после насадки обмотки
- вновь его зашихтовать. Обмотка,
подключенная к питающей сети переменного
тока, называется первичной. Все
параметры первичной обмотки будем
обозначать с индексом 1, например,
число витков
 .
Обмотка, к которой подключается
нагрузка (потребитель электрической
энергии) называется вторичной, и ее
параметры будут с индексом 2. При этом
числа витков и
в
обмотках разные. Предположим, что
вторичная обмотка трансформатора
разомкнута (не подключена нагрузка),
а первичная обмотка включена на сеть
синусоидального напряжения
.
Обмотка, к которой подключается
нагрузка (потребитель электрической
энергии) называется вторичной, и ее
параметры будут с индексом 2. При этом
числа витков и
в
обмотках разные. Предположим, что
вторичная обмотка трансформатора
разомкнута (не подключена нагрузка),
а первичная обмотка включена на сеть
синусоидального напряжения
 .
В первичной обмотке появится
синусоидальный ток
.
В первичной обмотке появится
синусоидальный ток
 который
создает в магнитопроводе переменный
поток Ф. Этот поток, замыкаясь в
магнитопроводе, сцеплен с обеими
обмотками и наводит ЭДС самоиндукции
в первичной обмотке
который
создает в магнитопроводе переменный
поток Ф. Этот поток, замыкаясь в
магнитопроводе, сцеплен с обеими
обмотками и наводит ЭДС самоиндукции
в первичной обмотке
 и
ЭДС взаимоиндукции во вторичной
обмотке
и
ЭДС взаимоиндукции во вторичной
обмотке
 .
Если вторичную обмотку замкнуть на
нагрузку
.
Если вторичную обмотку замкнуть на
нагрузку
 (см. рис. 2.1), то под действием ЭДС е2
в ней появится ток
.
Токи
(см. рис. 2.1), то под действием ЭДС е2
в ней появится ток
.
Токи
 и
и
 создают
свои намагничивающие силы
создают
свои намагничивающие силы
 и
и
 .
Согласно второму закону Кирхгофа для
магнитной цепи
.
Согласно второму закону Кирхгофа для
магнитной цепи
 или
или

 намагничивающая
составляющая, необходимая для создания
в сердечнике потока Ф, сцепленного со
всеми витками как первичной, так и
вторичной обмоток. Поток Ф называется
основным. Ток
намагничивающая
составляющая, необходимая для создания
в сердечнике потока Ф, сцепленного со
всеми витками как первичной, так и
вторичной обмоток. Поток Ф называется
основным. Ток
 - ток холостого хода первичной обмотки,
или намагничивающий ток. Пусть магнитный
поток Ф является синусоидальной
функцией времени
- ток холостого хода первичной обмотки,
или намагничивающий ток. Пусть магнитный
поток Ф является синусоидальной
функцией времени
 ,
где
,
где
 - амплитудное значение. Тогда ЭДС,
наведенная этим потоком в первичной
обмотке, равна:
- амплитудное значение. Тогда ЭДС,
наведенная этим потоком в первичной
обмотке, равна: (2.3)
(2.3) ,
а ее действующее значение равно
,
а ее действующее значение равно


 и
и
 создают потоки рассеяния
создают потоки рассеяния
 и
и
 соответственно
первичной и вторичной обмоток (см.
рис. 2.1). Потоком рассеяния будем
называть поток, созданный током
какой-то обмотки и сцепленный только
с этой же обмоткой. Так как потоки
рассеяния распределяются в немагнитной
среде, имеющей постоянную магнитную
проницаемость (
соответственно
первичной и вторичной обмоток (см.
рис. 2.1). Потоком рассеяния будем
называть поток, созданный током
какой-то обмотки и сцепленный только
с этой же обмоткой. Так как потоки
рассеяния распределяются в немагнитной
среде, имеющей постоянную магнитную
проницаемость ( ),
то можно считать индуктивности
),
то можно считать индуктивности
 .
Поэтому ЭДС рассеяния, наведенные
потоками
и
в своих обмотках, можно представить
как
.
Поэтому ЭДС рассеяния, наведенные
потоками
и
в своих обмотках, можно представить
как и
и
 (2.6)
(2.6)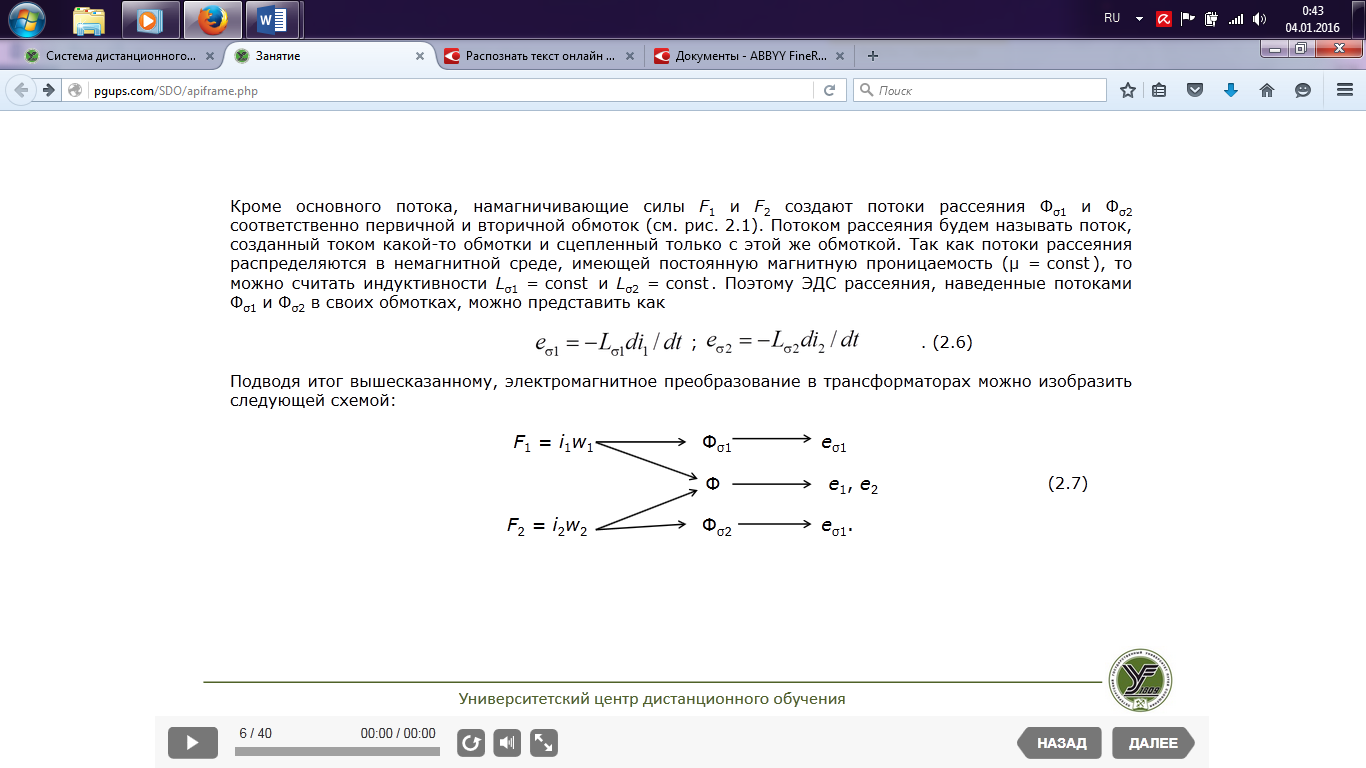
 <<
<<
 и
и
 <<
<<
 ,
а падение напряжения на полных
сопротивлениях
,
а падение напряжения на полных
сопротивлениях
 и
и
 обеих обмоток не превышают 2-3 % от
соответствующих напряжений
и
.
Иначе говоря,
~
и
~
обеих обмоток не превышают 2-3 % от
соответствующих напряжений
и
.
Иначе говоря,
~
и
~
 -
Но сами ЭДС
и
отличаются
друг от друга лишь за счет разного
числа витков
и
-
Но сами ЭДС
и
отличаются
друг от друга лишь за счет разного
числа витков
и
 в
обмотках. Следовательно, применяя
обмотки с требуемым соотношением
витков или с нужным коэффициентом
трансформации, можно изготовить
трансформатор на любое отношение
напряжений. Под коэффициентом
трансформации k понимают отношение
ЭДС, наводимых в первичной и вторичной
обмотках трансформатора основным
магнитным потоком
в
обмотках. Следовательно, применяя
обмотки с требуемым соотношением
витков или с нужным коэффициентом
трансформации, можно изготовить
трансформатор на любое отношение
напряжений. Под коэффициентом
трансформации k понимают отношение
ЭДС, наводимых в первичной и вторичной
обмотках трансформатора основным
магнитным потоком (2.8)
(2.8) .
ЭДС в обмотках наводиться не будет и
электроэнергия из первичной цепи не
будет передаваться во вторичную.
.
ЭДС в обмотках наводиться не будет и
электроэнергия из первичной цепи не
будет передаваться во вторичную.
3.2. Уравнения напряжений и намагничивающих сил трансформатора.
Выяснив, какие ЭДС наводятся в обмотках трансформатора (см. схему (2.7)), не составляет труда записать уравнения напряжений в мгновенных значениях для первичной и вторичной обмоток.
Для
первичной цепи трансформатора
уравнение напряжения в соответствии
со вторым законом Кирхгофа имеет
вид:
где
Для
вторичной цепи трансформатора,
замкнутой на нагрузку с сопротивлением
,
уравнение напряжений с учетом падения
напряжения на активном сопротивлении
Обычно силовые трансформаторы, а также ряд видов специальных трансформаторов работают с синусоидальными напряжениями и токами. Поэтому, вместо рассмотренных дифференциальных уравнений, удобнее пользоваться алгебраическими уравнениями, в которых действующие значения напряжений ЭДС и токов изображены комплексными числами. Тогда уравнения намагничивающих сил и напряжений, принимают вид:
где
Тогда уравнения намагничивающих сил и напряжений примут вид:
|
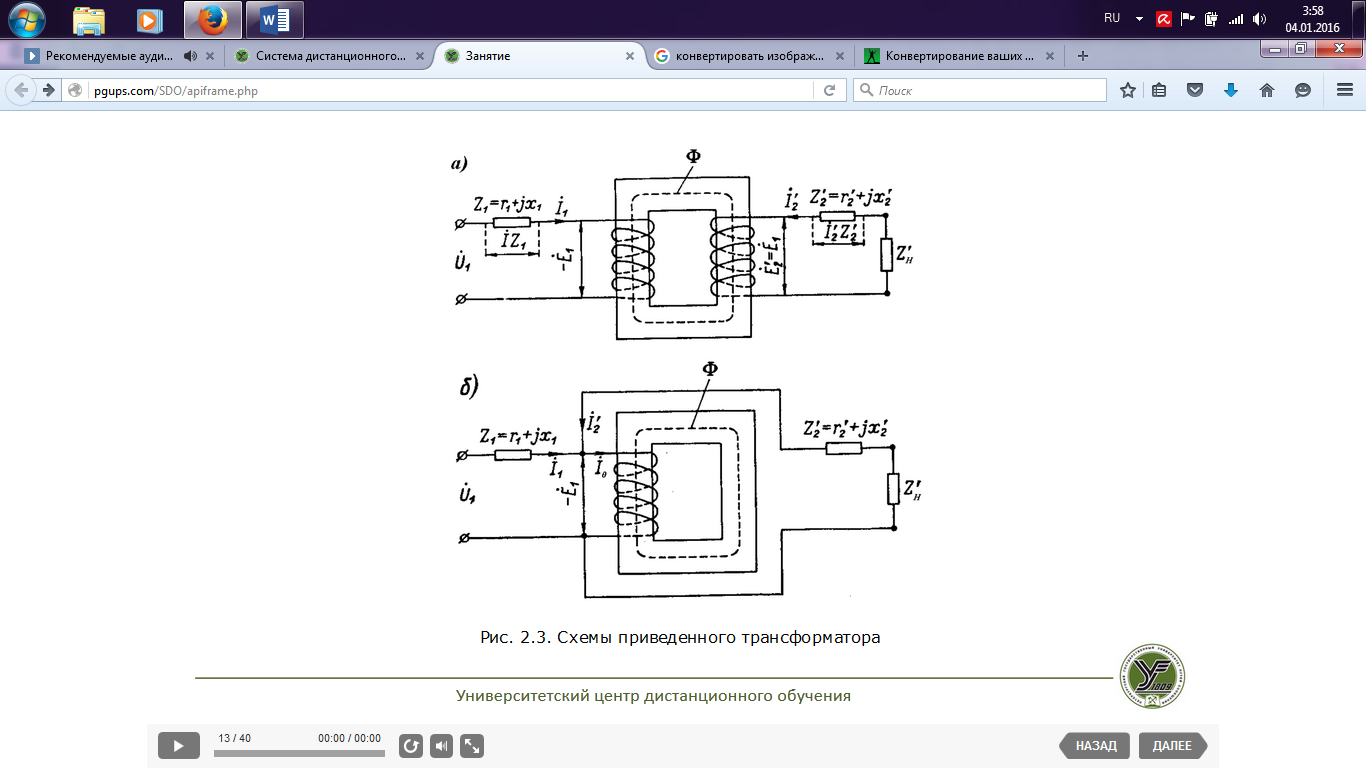
3.3. Приведенный трансформатор.
При
больших коэффициентах трансформации
значительно отличаются не только ЭДС
и токи обмоток, но и их активные и
индуктивные параметры. Это затрудняет
количественный учет процессов в
трансформаторе и построение векторных
диаграмм. Чтобы избежать указанных
затруднений, приводят обе обмотки к
одному числу витков. Обычно приводят
вторичную обмотку к первичной, т. е.
виртуально заменяют реальную вторичную
обмотку на приведенную с числом витков
.
В приведенном трансформаторе, по
сравнению с реальным, не должно бьгть
изменений в энергетических процессах
и, следовательно, в режиме работы
первичной обмотки. Параметры,
относящиеся к приведенной вторичной
обмотке, будем обозначать теми же
символами, что и в реальном, но со
штрихом сверху, например
При
приведении вторичной обмотки ее
полная мощность должна остаться
неизменной, т. е.
Отсюда
Из
условий равенства в реальной и
приведенной вторичной обмотке потерь
в меди
Приведенное
полное сопротивление вторичной
обмотки и сопротивления нагрузки
равны:
Если
подставить значения параметров
приведенной вторичной цепи, то получим
уравнение намагничивающих сил и
напряжений приведенного трансформатора:
Эти уравнения устанавливают, аналитическую связь между параметрами трансформатора во всем диапазоне нагрузок от режима холостого хода до номинальной нагрузки и нагрузок сверх номинала. |
3.4.Схема замещения трансформатора.
В реальном трансформаторе обмотки имеют электромагнитную связь (см. рис. 2.1). Это не очень удобно для количественного анализа процессов в трансформаторе.
Поэтому
желательно иметь схему замещения, в
которой все элементы связаны между
собой электрически и возможность
этого возникла только благодаря
приведенному трансформатору.
Электромагнитная схема замещения,
соответствующая системе уравнений
(2.20) приведенного трансформатора,
представлена на рис. 2.3, а. Так как в
приведенном трансформаторе,
Где
Зависимость
тока
Где
сопротивление
Т – образная схема замещения позволяет достаточно точно исследовать свойства трансформатора в любом режиме, причем расчетные исследования. Параметры
схемы замещения можно определит либо
рачетным путем, либо опытом хх или
кз.
|
3.5.Режим холостого хода трансформатора.
ХХ
трансформатора называется режим
работы трансформатора при разомкнутой
вторичной обмотке (
С
Ток
ХХ
Потери в меди первичной обмотки малы и ими пренебрегают (1-2)% от суммарных потерь в режиме ХХ.
Поскольку
Следовательно,
потери ХХ
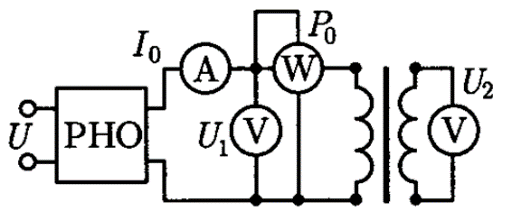
Опыт
ХХ однофазного трансформатора
проводится по схеме , где РНО –
однофазный регулятор напряжения.
Ваттметром измеряется мощность
(потери)
,
амперметром
и вольтметрами напряжение
Эти
величины помогают определить
коэффициент трансформации
Согласно
схеме замещения
В
силовых трансформаторах сопротивления
Таким образом, в опыте ХХ можно определить :
Коэффициент
трансформации Потери в стали сердечника трансформатора , Намагничивающийся ток при
|
|
|
||||||||||||
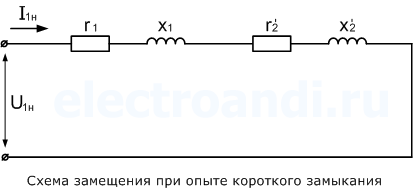
3.6. Режим короткого замыкания трансформатора.
КЗ
– такой режим, когда вторичная обмотка
замкнута накоротко ( Такое КЗ может произойти при эксплуатации трансформатора и называется аварийным.
При
испытании к трансформатору подводят
пониженное
Для
силовых трансформаторов
Тогда
из схемы замещения можно исключить
намагничивающий контур, а уравнение
намагничивающихся сил
Для
этой схемы замещения можно записать
уравнение напряжений
Где
По уравнению напряжения и схеме замещения построена векторная диаграмма трансформатора в режиме КЗ.
Вертикально
расположен вектор
,
и начиная от точки 0, откладываем
векторы падений напряжений Для практических целей треугольники КЗ строят для тока и выражают его стороны в процентном отношении от :
Величины
Т
к а режиме КЗ поток очень мал, то
потерями в стали можно пренебречь и
потери
|
3.7. Опыт короткого замыкания трансформатора.
В опыте короткого замыкания однофазного трансформатора вторичная обмотка закорачивается накоротко, то есть Zн=0, а напряжение вторичной обмотки U2=0. При этом напряжение первичной обмотки подводится пониженным, для того чтобы, не повредить трансформатор.
В опыте короткого замыкания определяют следующие параметры:
1
– Номинальное
напряжение короткого замыкания Uk.
Это напряжение первичной обмотки,
при котором значения токов короткого
замыкания в обмотках равны номинальным.
Выражается в процентном соотношении
от номинального напряжения U1н. 2 – Параметры схемы замещения. Так как ветви намагничивания при опыте короткого замыкания нет, то ток в первичной обмотке, равен току во вторичной.
Следовательно, полное сопротивление короткого замыкания можно определить как
3 – Сопротивления вторичной обмотки
4 – Полное падение напряжения короткого замыкания Uk в обмотках и его активную и реактивную составляющую в %
5 – Потери короткого замыкания Pk. Так как, в опыте короткого замыкания на первичную обмотку подается пониженное напряжение, то магнитный поток имеет малую величину и им можно пренебречь. Следовательно, мощность потребляемая трансформатором расходуется на электрические потери в обмотках.
|
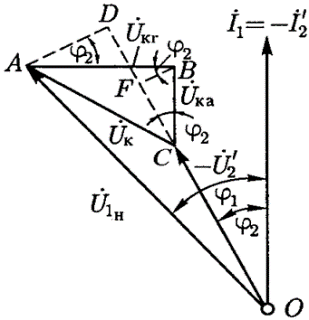
3.8. Векторная диаграмма при активно – индуктивной нагрузке.
Проанализируем аналитически работу трансформатора под нагрузкой по Т – образной схеме замещения.
При
этом можно рассчитать потребляемую
Более наглядно проанализировать работу трансформатора позволяют векторные диаграммы, построенные по уравнениям (1)
На рис изображена векторная диаграмма для активно – индуктивной нагрузки. при номинальном напряжении в трансформаторе мал и составляет не более (5-10)% Потери в меди первичной обмотки малы и ими пренебрегают (1-2)% от суммарных потерь в режиме ХХ. Поскольку , то при и поток Ф в сердечнике будет номинальным, а потери на гистерезис и вихревые токи в стали магнитопровода будут такими же, как при номинальной нагрузке.
А
это значит при
Векторную
диаграмму начнем строить
с вектора
Для создания этого потока необходим намагничивающий ток , вектор которого опережает вектор потока.
Создаваемые
потоком
ЭДС
Ток
Согласно
уравнению намагничивающих сил вектор
тока
Векторы
Потребляемую и отдаваемую активную мощность можно найти:
|
3.9. Упрощенная векторная диаграмма трансформатора.
В силовых трансформаторах, работающих в режимах, близких к номинальной нагрузке, пренебрегают током , т е считают ., так как токи - суммируются геометрически при определении , то ошибка от принятого значительно уменьшается.
Кроме
того, она возникает только в отношении
падения напряжения
Т
Если
считать заданным
и
Следовательно,
вторичное напряжение
можно рассматривать как результат
наложения на режим ХХ, определяемый
вектором
Рис Треугольник КЗ |
|
|
||||||||||||
3.10. КПД трансформатора
Это
отношение полезной (отдаваемой)
трансформатором активной мощности
Так как КПД силовых трансформаторов довольно высок (в крупных трансформаторах превышает 99 %), то метод прямого определения КПД путем измерения мощностей и неприменим, поскольку погрешности измерений приведут к грубой ошибке в расчете КПД. Этого можно избежать, используя методы косвенного определения КПД, когда измеряют одну из мощностей, а вторую выражают через потери и измеренную мощность.
В
трансформаторе, как уже отмечалось,
основными потерям являются потери в
стали
и потери в меди обмоток
Тогда
Как
было выяснено выше, потери в стали
Потери
в меди зависят от квадрата тока,
поэтому, определив в опыте К3 потери
Зная
номинальные ток
Следовательно,
КПД
достигает максимума
Для
силовых трансформаторов КПД достигает
максимального значения при
Последнее
выражение можно представить в виде
Из формулы (1) видно, чем выше , т е чем выше удельный вес активной составляющей нагрузки, тем выше КПД.
|
3.11. Внешняя характеристика трансформатора
При изменении нагрузки в процессе работы трансформатора будет изменяться и напряжение
Одной
из важнейших эксплуатационных
характеристик трансформатора является
изменение вторичного напряжения
За номинальное вторичное напряжение принимается напряжение в режиме ХХ при
Так
как при ХХ практически отсутствуют
падения напряжения в обмотках
трансформатора, то
Изменение
вторичного напряжения можно представить
в следующем виде:
Для получения аналитического выражения, воспользуемся векторной диаграммой, сделав в ней дополнительные построения.
И Построим отрезок BF, перпендикулярный CD.
С
учетом незначительной погрешности
примем, что отрезок OA=OD.
Тогда
Подставив
в (1) значение
Чтобы
рассчитать изменение вторичного
напряжения
Внешней
характеристикой трансформатора
называют зависимость
На
рисунке представлена зависимость
внешней активной
характеристики (
Эти
характеристики легко рассчитать по
выражению:
Относительно
численных значений
можно привести пример: для тр ров при
|
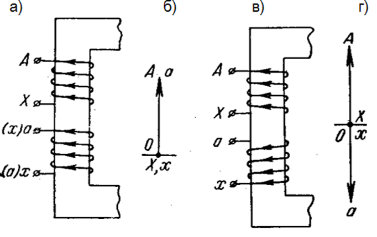
3.12. Группы соединения обмоток трансформатора
Для
включения трансформатора на параллельную
работу С другими трансформаторами
необходимо знать, к какой группе
соединений он относится. Группа
соединений характеризуется углом
сдвига
Группа соединения, или угол , зависит от направления намотки обмотки, маркировки зажимов и способа соединения обмоток.
Рассмотрим вначале влияние первых двух факторов с помощью рис.
Пусть обе обмотки намотаны в одном направлении и у них одинакова маркировка выводов, т. е. верхние выводы обмоток обозначены А и а, а нижние - Х и х (см. рис. а). Поскольку обмотки сидят на одном стержне и сцеплены с одним потоком, то во всех витках наводятся одинаковые ЭДС, направление которых для какого-то момента времени указаны стрелками. Суммарная ЭДС первичной обмотки направлена от конца Х к началу А. Такое же направление, а именно от х к а, будет и у полной ЭДС приведенной вторичной обмотки.
Соответственно
этому напряжения
и
Если первичная и вторичная обмотки намотаны в разные стороны (рис в), но сохраняют те же обозначения выводов, что и на рис., а, то, как видно из рис. 2.15, г, напряжения и относительно выводов первичной и вторичной обмоток направлены в разные стороны. В этом варианте угол равен 180°. Такой же результат ( α = 180°) можно получить и для случая на рис. а, если поменять маркировку зажимов, например, вторичной обмотки (обозначения в скобках). Вместо того чтобы выражать угол сдвига между напряжениями в градусах, удобнее пользоваться часовым способом обозначения угла. Для этого вектор принимают за большую стрелку часов и устанавливают постоянно на цифре 12 часового циферблата, а вектор принимают за малую стрелку часов и устанавливают на циферблате соответственно положению вектора относительно вектора . Цифра циферблата, на которую укажет маленькая стрелка (вектор ), обозначает номер группы. Например, на рис. 2.15, а трансформатор принадлежит к группе О (напомним, что цифру 12 на циферблате можно считать также и 0), а на рис. б — к группе 6. Как следует из анализа рис. В однофазном трансформаторе возможны лишь две группы, а именно 0 и 6. Из этих групп ГОСТ предусматривает лишь нулевую группу.
У трехфазных трансформаторов группа соединения, кроме рассмотренных выше двух факторов, еще зависит и от способа соединений «в звезду» или «в треугольник» первичной и вторичной обмоток
Рассмотрим вначале способ соединения У/У. Если обе обмотки намотаны в одном направлении и одинакова маркировка выводов соответствующих обмоток, то получим группу 0. Она обозначается У/У —0.
Если одновременно на всех фазах вторичной обмотки поменять маркировку выводов, то образуется группа 6 соединения. Меняя по кругу маркировку выводов на одной стороне трансформатора при каждой из групп, 0 и 6, получим остальные четные группы соединений, а именно 2, 4, 8 и 10.
Все
четные группы соединений, естественно,
можно образовать и при соединении
обмоток в
Способом, описанным выше, нетрудно установить, что соединению У/ соответствуют и все остальные нечетные группы: 1, 3, 7, 9. Для облегчения включения трансформатора на параллельную работу при их эксплуатации трехфазные силовые трансформаторы в нашей стране выпускаются только двух групп: нулевой и одиннадцатой.
|
3.13. Условия включения на параллельную работу трансформатора
Параллельной работой двух или нескольких трансформаторов называется работа при параллельном соединении их обмоток как на первичной, так и на вторичной сторонах.
На практике энергоснабжение потребителя осуществляется не от одного трансформатора необходимой мощности, а от нескольких параллельно включенных трансформаторов с наименьшей суммарной мощностью.
Это позволяет уменьшить потери электроэнергии при снижении нагрузок путем отключения ряда трансформаторов и обеспечить резервирование в энергоснабжении потребителей в случае аварии или ремонта трансформаторов.
Для создания благоприятных условий эксплуатации все включаемые на параллельную работу трансформаторы должны:
1) принадлежать к одной группе соединения; 2) иметь равные коэффициенты трансформации; 3) иметь равные напряжения короткого замыкания.
Самым жестким является первое условие. Действительно, если даже включим на параллельную работу два трансформатора соседних групп, 11 и 0, со сдвигом фаз 30° между вторичными напряжениями, то, как показано в [1-4], в замкнутом контуре вторичных обмоток появится разность этих напряжений 0‚518 ‚ под действием которой возникает уравнительный ток, превышающий в несколько раз номинальный.
Иными словами, трансформатор фактически будет работать в режиме К3. Поэтому не допускают включение на параллельную работу трансформаторов с различными группами соединения обмоток.
Второе
и третье условия
менее жесткие, чем первое. Так, ГОСТ
допускает включение на параллельную
работу трансформаторов с различными
коэффициентами трансформации, если
разница коэффициентов не превышает
Отклонение
напряжений короткого замыкания
параллельно работающих трансформаторов
не должно превышать
Если выполнены все три указанные условия включения на параллельную работу, то трансформаторы нагружаются пропорционально их номинальным мощностям, а их упрощенные векторные диаграммы работы под нагрузкой, построенные в относительных единицах, совпадут.
|
|
|
||||||||||||
4. АМ Асинхронные машины (АМ) — это один из основных видов электрических машин переменного тока. АМ используются главным образом в качестве электрических двигателей трехфазного тока. Они благодаря простоте устройства и высокой надежности являются наиболее распространенным в промышленности типом электрических двигателей с диапазоном мощностей от нескольких кВт до сотен кВт. В системах автоматического регулирования широко применяются асинхронные машины малой мощности, так называемые микромашины.
|
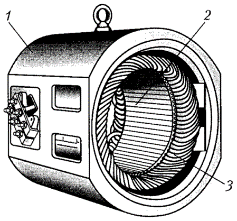
4.1.Конструкция асинхронных машин. Основными элементами АМ, в зоне которых происходит преобразование энергии, являются статор и ротор. Статор — неподвижная часть машины, которая конструктивно одинакова как для асинхронных, так и синхронных машин (рис.3.1). Сердечник статора 2 представляет из себя цилиндр, набранный из листов электротехнической стали, на внутренней поверхности которого имеется z1 пазов (или z1 зубцов). В эти пазы укладывается трехфазная обмотка 3, которая подключается к сети и называется статорной или по аналогии с трансформаторами, первичной. Сердечник статора крепится в корпусе 1.
Рис.3.1 Конструкция статора машин переменного тока
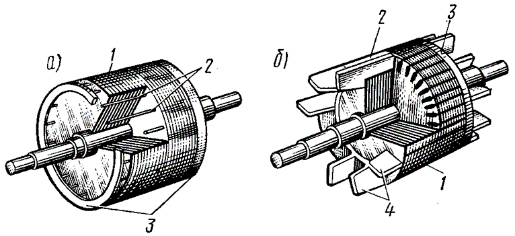
В зависимости от конструкции ротора асинхронные машины бывают двух видов: с фазным ротором или с контактными кольцами (рис.3.2)‚ с короткозамкнутым ротором (рис.3.3). Сердечники ротора 1 в обоих случаях набираются из листов электротехнической стали и на их внешних цилиндрических поверхностях имеются пазы для размещения роторных (или вторичных) обмоток. Фазный ротор имеет трехфазную обмотку 2 (см. рис.3.2), выполненную изолированным проводом и обычно соединенную в "звезду”. Начала обмоток выводятся на контактные кольца 3 с наложенными на них щетками 4. Через контактные пары кольца-щетки в цепь обмотки ротора включают пусковой реостат (вводят добавочные сопротивления). Как правило, АМ изготавливаются с фазным ротором для мощностей более 10 кВт.
Рис.3.2 Конструкция фазного ротора АМ Короткозамкнутый ротор по конструкции проще, чем фазный. Обмотка ротора выполнена в виде “беличьей клетки", то есть состоит из медных или алюминиевых стержней 2, замкнутых накоротко с торцов сердечника ротора 1 двумя кольцами 3 (рис.3.З‚ а). Стержни этой обмотки не изолируются. В АМ малой мощности вместе со стержнями “беличьей клетки” отливают из алюминия короткозамыкающие кольца и торцевые лопасти 4, осуществляющие вентиляцию машины (рис.3.З‚ б). В электрическом отношении “беличья клетка” представляет собой многофазную обмотку, соединенную в "звезду” и замкнутую накоротко. Число фаз обмотки m2 равно числу пазов ротора z2 Сердечник ротора крепится к валу (рис.3.2 и 3.3) и заводится в статор. Воздушный зазор между статором и ротором выполняют как можно меньшим по условиям надёжности работы. В АМ мощностью несколько кВт величина зазора составляет (0‚4 ÷ 0,5) мм, а в машинах большой мощности — несколько миллиметров. Вал ротора вращается в подшипниках, которые помещаются в подшипниковых щитах 5 (рис.3.2), прикрепленных к корпусу статора (рис. 3.1).
Рис.3.3 Конструкция короткозамкнутого ротора АМ
|
4.2. Вращающееся магнитное поле. В основе принципа действия асинхронных и синхронных машин лежит явление образования вращающегося магнитного поля при питании трехфазных статорных обмоток системой трехфазного тока. Для упрощения рассмотрения этого, условимся представлять каждую из фаз статорной обмотки одним витком (рис.3.4). При этом, проводники одного витка, например А и Х, расположены диаметрально противоположно на расточке статора, а начала фаз (витков) сдвинуты в пространстве, естественно, на 120°. На рис.3.4‚ а показана кривая синусоидального распределения токов вдоль развернутого статора и линии магнитного поля, созданного статорными токами для момента времени, когда токи в фазах равны При изменении фазы питающего тока на 30° (рис.3.4‚ б), кривая распределения токов и магнитный поток Ф повернутся в направлении следования фаз также на угол 30°. Вполне ясно, что если фаза токов изменится, например, на 120° и ‚ то магнитный поток будет направлен по оси фазы В, то есть повернется на угол 120° и так далее.
Рис.3.4 Простейшая обмотка статора с 2р=2 и ее магнитное поле Таким образом, статорная обмотка при питании трехфазным током создает круговое вращающееся магнитное поле. В рассматриваемом случае частота вращения поля
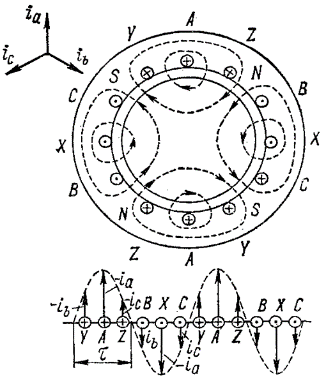
Рис.3.5 Простейшая обмотка статора с 2р=4 Как было определено выше, магнитное поле вращается в направлении чередования фаз А, В и С обмотки статора. Для изменения направления вращения поля на обратное достаточно поменять местами на зажимах статора концы двух питающих проводов.
|
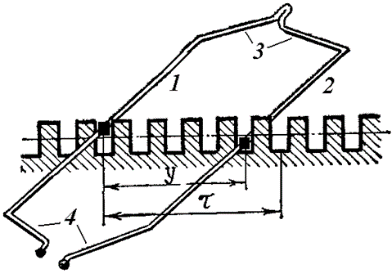
4.3. ЭДС обмоток машин переменного тока. Рассматривая в данном разделе обмотки, будем иметь в виду статорные обмотки асинхронных и синхронных машин, а также роторные обмотки АМ с контактными кольцами. В настоящее время в машинах переменного тока мощностью более 10 кВт применяют двухслойные петлевые обмотки. На рис.3.6 представлен простейший элемент такой обмотки — виток, состоящий из двух проводников 1 и 2, размещенных в разных слоях двух пазов, находящихся ДРУГ от друга на расстоянии ‚ называемым шагом обмотки. Пазовые части витка соединяются с помощью лобовых частей 3 и 4, расположенных в неактивной зоне машины. Двухслойная обмотка, по сравнению с однослойной, применяемой в АМ мощностью от 0,6 до 10 кВт, позволяет сократить лобовые части обмоток, выполнить любое сокращение шага обмотки и сделать обмотку шаблонной. Но однослойная обмотка, выполняемая из мягкого провода, позволяет автоматизировать процесс намотки и укладки обмоток и поэтому широко используется в АМ малой мощности.
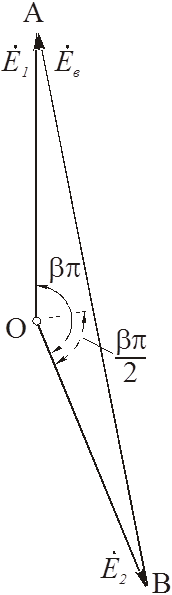
Рис.3.6 Виток двухслойной петлевой обмотки АМ Для наведения максимальной ЭДС виток должен быть сцеплен с потоком всего полюса, то есть иметь шаг y=Ʈ. Но в реальных машинах магнитный поток не является чисто синусоидальным и, кроме основной гармоники v=1‚ cодержит высшие нечетные гармоники (v = 3, 5‚ 7‚ 9,...)‚ которые наводят в обмотке свои ЭДС. Поэтому для получения синусоидальной ЭДС основной частоты или подавления высших гармоник, шаг обмотки выбирается с сокращением у < Ʈ. Отношение шага обмотки к полюсному делению называют относительным шагом обмотки или укорочением β=y/Ʈ. Обычно укорочение принимается равным (0,8 ÷ 0,856), что обеспечивает значительное ослабление высших гармоник. Представим, что проводник 1 на рис.3.6 находится на оси полюса и в нем наводится в этот момент времени максимальная ЭДС
К определению Ев При амплитудном значении индукции Рис.3.8 ЭДС катушечной группы (q=4) Величина ЭДС катушечной группы может быть определена по выражению:
|
||||||||||||||
5. АМ Асинхронные машины (АМ) — это один из основных видов электрических машин переменного тока. АМ используются главным образом в качестве электрических двигателей трехфазного тока. Они благодаря простоте устройства и высокой надежности являются наиболее распространенным в промышленности типом электрических двигателей с диапазоном мощностей от нескольких кВт до сотен кВт. В системах автоматического регулирования широко применяются асинхронные машины малой мощности, так называемые микромашины.
|
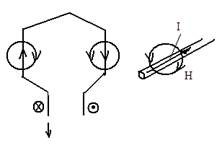
5.1.Принцип действия АМ. Работа АМ основывается на электромагнитном взаимодействии вращающегося магнитного поля, созданного системой трехфазного тока статорной обмотки и токов, наводимых в обмотке ротора при пересечении её проводников вращающимся полем. Разобраться в этом поможет рис.3.9‚ на котором изображены части расточки статора и поверхности ротора с одним проводником роторной обмотки. Рассмотрение принципа действия АМ начнем с режима двигателя. При включении статорной обмотки в сеть, она создает магнитное поле, вращающееся относительно неподвижного ротора с частотой n1‚ и индуктирует в обмотке ротора ЭДС E2, направление которой из — за плоскости рисунка к нам определяем по правилу правой руки (рис.3.9‚ а). Так как цепь обмотки ротора замкнута, то по ней будет протекать ток I2, активная составляющая которой совпадает по направлению с E2. На проводник с током в магнитном поле действует электромагнитная сила F0,направление которой определено на рис.3.9‚ а по правилу левой руки. Сила F0 создает на валу момент, который стремится повернуть ротор в направлении вращения потока, то есть является вращающим. Совокупность моментов, созданных отдельными проводниками, образуют результирующий момент машины М. Если этот момент больше тормозного момента на валу, то ротор придет во вращение со скоростью n. Таким образом, электрическая энергия, подводимая к статору из сети, преобразовывается в механическую энергию на валу, иначе говоря, машина работает двигателем. Частота вращения n в двигательном режиме может изменяться от n = 0 до n1‚ но не может достигать последней, так как при n = n1, в роторной обмотке не будет наводиться E2 и, в конечном итоге, не будет создаваться вращающий момент М.
Рис.3.9. Принцип действия АМ Если приводным двигателем ускорить ротор АМ так, чтобы n стало больше n1, то, как видно из рис.3.9‚ б, изменится направление ЭДС Е2 и тока в проводнике, знак силы F0 и момента М. Следовательно, момент развиваемый АМ становится тормозным по отношению к вращающему моменту приводного двигателя. В этих условиях асинхронная машина будет работать генератором, преобразовывая механическую энергию, подводимую с вала, в электрическую, которую она отдает в сеть. В сеть отдается активная мощность, а для создания вращающегося поля статорная обмотка из сети потребляет реактивную мощность, что является недостатком асинхронных генераторов, который лишает их широкого применения. Кроме двигательного и генераторного режимов АМ может работать в режиме электромагнитного тормоза, например, при опускании груза подъёмным краном. В этом режиме ротор вращается в сторону противоположную вращению поля. Режим начинается при n = 0 и может продолжаться теоретически до n = ∞. При этом к АМ энергия подводится с двух сторон — электрическая из сети и механическая со стороны вала. Вся подводимая энергия идет на нагрев ротора, поэтому этот режим очень тяжел для АМ и его стараются избегать. Во всех трех рассмотренных режимах работы АМ n≠n1, то есть ротор вращается асинхронно с магнитным полем, что и предопределило название этого типа электрических машин. В АМ вводится понятие скольжения s, относительного отставания (или опережения) частоты вращения ротора n относительно частоты вращения магнитного поля n1 S=(n1-n)/n1 (3.9) Диапазон изменения скольжения для трех режимов работы АМ составляет 0 ˂ s ≤ 1- в двигательном; 0 < s ˂ -∞ - в генераторном; 1 ≤ s < +∞ — в режиме электромагнитного тормоза.
|
5.2.Работа АМ с неподвижным ротором. |
5.3.Приведение режима работы АМ при вращающемся роторе к режиму работы при неподвижном роторе. Рассмотрим асинхронную машину с заторможенным ротором (n=0, s=1) и имеющую трехфазные обмотки на статоре и на роторе. Обмотка ротора замкнута на нагрузку, первичная – запитана симметричной системой трехфазного тока частотой f1. Очевидно, что в данном случае АМ работает как трансформатор. Магнитный поток Ф1‚ созданный обмоткой статора, при вращении пересекает проводники обмотки ротора, наводя в них ЭДС Е2. Так как обмотка ротора замкнута на нагрузку, по ней начинает протекать ток I2‚ частота которого f2 при n=0 равна f1. Трехфазная роторная обмотка создает свой вращающийся поток Ф2 ‚число пар полюсов 2р ‚ направление и частота вращения которого n2 при n=0 такие же, как и у потока статора (n2=f2/p=f1/p=n1). Поэтому, потоки Ф1 и Ф2 вращаются синхронно и образуют общий поток Ф. Этот поток наводит в обмотках статора и ротора ЭДС соответственно
|
||||||||||||||
5.4. Уравнения намагничивающих сил и ЭДС, схемы замещения асинхронной машины. Уравнения НС и ЭДС приведенной АМ (роторная обмотка приводится к статорной аналогично приведению вторичной обмотки трансформатора к первичной [6]) имеют вид
|
5.5. Векторная диаграмма асинхронного двигателя Используя принципы построения векторной диаграммы для трансформатора, построим ее для асинхронного двигателя. Вначале во втором основном уравнении величину r2' представим в виде:
что математически не противоречит друг другу. Тогда само уравнение можно переписать:
Используя три основных уравнения двигателя, построим векторную диаграмму, которая, будет несколько напоминать диаграмму трансформатора (рис. 5.7.1).
Вторичное напряжение определяется вектором:
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке. Мощность, отдаваемая вторичной обмоткой данного трансформатора
|
5.6. Энергетическая диаграмма асинхронного двигателя. Процесс передачи и преобразования активной мощности по Т-образной схеме замещения на рис.3.10‚ а происходит слева направо и отражен на энергетической диаграмме (рис.3.11). Асинхронный двигатель потребляет из сети активную мощность
Рис.3.11 Энергетическая диаграмма АД Часть этой мощности теряется в виде электрических потерь в обмотке ротора
|
5.7. Механическая характеристика асинхронного двигателя. Эксплуатационные требования к ней. Электромагнитный момент АД создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Он зависит от величины электромагнитной мощности, определяемой по выражению (3.19) и угловой скорости вращения магнитного поля
Рис.3.12 Механическая характеристика АМ Характерной особенностью асинхронного двигателя (АД), наиболее распространенного типа АМ, является пропорциональность развиваемого им момента от квадрата напряжения сети |
|
|||||||||||||
|
5.8. Регулирование частоты вращения асинхронных двигателей. Напомним, что частота вращения АД определяется как n=n1*(1-s)=(f1/p)*(1-s). Отсюда следует, что регулировать частоту вращения n АД можно изменением какой либо из трех величин: частоты f1 питающего тока, числа пар полюсов р обмотки статора и скольжения s. Частотное регулирование позволяет применять наиболее надежные и дешевые АД с короткозамкнутым ротором. Для изменения частоты f1 можно применять полупроводниковый преобразователь частоты (ПЧ)или использовать синхронный генератор с переменной частотой вращения. Если пренебречь в уравнении напряжения первичной обмотки (3.17) небольшим падением напряжения
Рис.3.16 Изменение основных параметров АД при частотном регулировании его скорости Регулирование частоты вращения n изменением числа пар полюсов р на статоре применяют только для АД с короткозамкнутым ротором, которые в этом случае называются многоскоростными. Они выпускаются на 2,3 или 4 скорости. Двухскоростной двигатель имеет одну обмотку на статоре с переключением числа пар полюсов в отношении р1:р2 = 2:1, трёхскоростной двигатель - две обмотки на статоре, одна из которых с переключением р1:р2 = 2:1 четырехскоростной двигатель -две обмотки на статоре и обе с переключением р1:р2 = 2:1. Каждая фаза обмотки с переключением числа пар полюсов состоит из двух частей (полуфаз)с одинаковым числом катушечных групп в каждой. Смысл двукратного изменения числа полюсов ясен из рис. 3.17, на котором представлены две полуфазы А-Х и А’-Х’ фазы А статорной обмотки. Переключение полуфаз с последовательного (рис.3.17а) на параллельное (рис. 3.176) соединение и позволяет осуществить изменение числа пар полюсов в соотношении 2:1.
Рис. 3.17 Последовательное(а) и параллельное(б) включение полуфаз простейшей обмотки Наиболее употребляемыми способами соединения статорных обмоток в многоскоростных АД являются «звезда»/ «двойная звезда» (Y/YY) и «треугольник»/ «двойная звезда»(Δ/YY). На рис. 3.18 представлен способ соединения обмотки Y/YY, где Iф- ток полуфазы обмотки. Так как при соединении в Y полуфазы соединены последовательно ‚ а в YY - параллельно, то очевидно, что nYY = 2nY. Найдём мощности на валу АД для двух способов соединения обмотки ‚положив, что при одинаковых значениях IФ практически одинаковыми будут η и
|
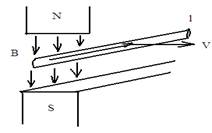
6. Синхронные Машины Конструкция ротора. Как уже отмечалось выше, все машины переменного тока имеют одинаковую конструкцию неподвижной части, именуемой статором, но отличаются устройством вращающейся части, именуемой ротором. Явнополюсная синхронная машина (СМ) имеет на роторе явно выраженные сердечники полюсов (рис.4.1.а) с полюсными наконечниками и сосредоточенной обмоткой возбуждения, выполненной в виде катушки, надетой на сердечник полюса. В этом случае магнитная проводимость воздушного зазора в зоне полюсного наконечника намного выше, чем в зоне межполюсного пространства. Неявнополюсная СМ (рис.4.1.б) имеет неявно выраженные полюсные зоны на сердечнике ротора в виде беспазовых участков (до 1/3 полюсного деления), именуемые главным зубом, и зубцовый слой (до 2/3 полюсного деления), в пазах которого размещается распределенная обмотка возбуждения. Воздушный зазор в этом случае по всей окружности остается неизменным, а магнитная проводимость зазора по всем радиальным направлениям - практически одинаковой. Питание обмотки возбуждения в обоих случаях может быть либо независимым, осуществляемым через контактные кольца от постороннего источника постоянного тока, либо организовано по системе косвенного самовозбуждения, когда на валу синхронной машины устанавливается возбудитель (генератор постоянного тока небольшой мощности). Организация прямого самовозбуждения предполагает питание обмотки возбуждения от обмотки якоря (статора) через выпрямитель и контактные кольца. Мощность, расходуемая на возбуждение, не превышает (3
|
6.1. Принцип действия. В режиме генератора ротор синхронной машины приводится во вращение внешним приводным двигателем (турбина, дизель, эл. двигатель), при этом стремятся поддерживать постоянной номинальную частоту вращения
|
6.2. Виды реакции якоря СГ. Магнитное поле синхронной машины при нагрузке. Режим нагрузки характеризуется появлением тока
|
|
||||||||||||
|
6.3. Уравнение напряжения синхронного явнополюсного генератора. 6.4. Векторная диаграмма явнополюсного СГ. Уравнения электродвижущих и намагничивающих сил синхронной машины. Уравнение напряжений обмотки статора СМ можно записать следующим образом
|
6.5. Внешняя и регулировочная характеристика СГ. Эксплуатационные характеристики. Внешняя характеристика (зависимость (
|
6.6. Угловые характеристики СМ.
Важным
параметром, определяющим работу СМ,
является угол сдвига между вектором
ЭДС от поля возбуждения
,
и вектором напряжения обмотки статора
‚
именуемый углом нагрузки
. Угол
весьма близок в силу малости параметров
и
к
углу сдвига
между векторами
и
Тогда, проведя несложные преобразования, получим выражение для мощности синхронной машины
Электромагнитный
момент, развиваемый синхронной
машиной, равен
Первая
составляющая момента называется
основной и обусловлена процессами
взаимодействия поля возбуждения
ротора (посредством ЭДС
)
и результирующего поля в зазоре
(посредством напряжения
).
Вторая составляющая называется
параметрической и обусловлена
различной магнитной проводимостью
воздушного зазора по продольной и
поперечной осям. Параметрический
момент возникает только в явнополюсных
машинах и не зависит от наличия тока
в обмотке возбуждения. Синхронные
явнополюсные машины без обмотки
возбуждения на роторе получили
название синхронные реактивные
двигатели. На рис.4.5 представлены
зависимости
Угловые характеристики: 1. Основной, 2.Параметрический, 3.Результирующие моменты.
|
|
|
||||||||||||
|
|
7.1. Конструкция машины постоянного тока (МПТ). Неподвижная часть МПТ (рис. 1.1) называется индуктором и состоит из стального корпуса 1, именуемого станиной или остовом и выполняющего обычно роль магнитопровода, главных 2 и добавочных 3 полюсов, траверсы 4 со щеткодержателями и подшипниковых щитов 5. Сердечники главных и добавочных полюсов могут быть выполнены из массивной стали или набраны из отдельных неизолированных стальных листов, так как по ним проходит постоянный магнитный поток. В случае интенсивного регулирования магнитного потока, а также при наличии в этом потоке переменной составляющей (тиристорное или импульсное питание) целесообразно внутреннюю часть корпуса и сердечники главных и добавочных полюсов изготавливать из тонких изолированных друг от друга листов электротехнической стали. На главных и добавочных полюсах расположены обмотки возбуждения главных 6 и добавочных 7 полюсов, выполненные в виде сосредоточенных катушек. Обмотка возбуждения главных полюсов предназначена для создания основного магнитного потока в воздушном зазоре, а обмотка возбуждения добавочных полюсов — для создания коммутирующего поля (см. коммутация МПТ). В машинах небольшой мощности добавочные полюса могут отсутствовать. МПТ средней и большой мощности могут иметь компенсационную обмотку 8, расположенную в пазах наконечника главного полюса.
|
7.2.-7.3 Принцип действия МПТ. Уравнения напряжений генератора и двигателя постоянного тока. На рис. 1.2 изображена простейшая физическая модель МПТ, где в зазоре между двух полюсов 1 может свободно вращаться рамка 2, концы которой подпаяны к двум пластинам 3, соприкасающимся с неподвижными щетками 4.
|
7.4-7.5 ?Регулирование частоты вращения двигателей постоянного тока. Двигатели постоянного тока получили широкое распространение и часто являются незаменимыми благодаря ценному свойству - возможности плавно и экономично регулировать частоту вращения в широких пределах. Частота вращения якоря двигателя при любой схеме возбуждения определяется следующим выражением:n = (U - I(Rя - Rc))/СФ, где Rc — сопротивление последовательной обмотки возбуждения (для двигателя параллельного возбуждения Rс = 0). Это выражение показывает, что частота вращения двигателя зависит от напряжения сети, сопротивления цепи якоря и магнитного потока. Частоту вращения регулируют путем изменения напряжения сети в том случае, когда источником электрической энергии двигателя является какой-либо генератор. Для регулирования частоты вращения двигателя изменением сопротивления цепи якоря используют регулировочный реостат, включенный последовательно с якорем. В отличие от пускового регулировочный реостат должен быть рассчитан на длительное прохождение тока. В сопротивлении регулировочного реостата происходит большая потеря энергии, вследствие чего резко уменьшается кпд двигателя. Регулируют частоту вращения якоря двигателя изменением магнитного потока, который зависит от тока в обмотке возбуждения. В двигателях параллельного и смешанного возбуждения для изменения тока включают регулировочный реостат, а в двигателях последовательного возбуждения для этой цели шунтируют обмотку возбуждения каким-либо регулируемым сопротивлением. Последний способ регулирования частоты практически не создает дополнительных потерь и экономичен.
|
|
|
|
||||||||||

 - активное сопротивление первичной
обмотки.
- активное сопротивление первичной
обмотки. вторичной обмотки можно записать:
вторичной обмотки можно записать:



 - действующие значения ЭДС рассеяния,
- действующие значения ЭДС рассеяния,

 -
индуктивные сопротивления рассеяния
первичной и вторичной обмоток
соответственно. Орт
-
индуктивные сопротивления рассеяния
первичной и вторичной обмоток
соответственно. Орт
 показывает, что ЭДС рассеяния отстает
от вызвавшего ее тока на 90°, т. е. этим
подчеркивается реактивный характер
ЭДС рассеяния. Подставим в систему
(2.11) вместо ЭДС
их выражения по (2.12) и преобразуем ее,
учитывая, что
показывает, что ЭДС рассеяния отстает
от вызвавшего ее тока на 90°, т. е. этим
подчеркивается реактивный характер
ЭДС рассеяния. Подставим в систему
(2.11) вместо ЭДС
их выражения по (2.12) и преобразуем ее,
учитывая, что

 -
полные сопротивления первичной и
вторичной обмоток соответственно.
-
полные сопротивления первичной и
вторичной обмоток соответственно.
 Рассмотрим, как изменятся параметры
вторичной цепи в приведенном
трансформаторе. Естественно, что
Рассмотрим, как изменятся параметры
вторичной цепи в приведенном
трансформаторе. Естественно, что (2-14)
(2-14)

 реактивных
мощностей
реактивных
мощностей
 найдем
значения
найдем
значения
 и
и
 :
:



 или
или
 ‚
то обе обмотки можно соединить в одну
(рис. 2.3, б), по которой протекает
намагничивающий ток
‚
то обе обмотки можно соединить в одну
(рис. 2.3, б), по которой протекает
намагничивающий ток
 .
Объединенная обмотка играет роль
намагничивающего контура, который
создает основной магнитный поток Ф.
Зависимость между
.
Объединенная обмотка играет роль
намагничивающего контура, который
создает основной магнитный поток Ф.
Зависимость между на зажимах намагничивающего контура
и током
в контуре определяется уравнением:
на зажимах намагничивающего контура
и током
в контуре определяется уравнением:
 – полное сопротивление намагничивающего
контура;
– полное сопротивление намагничивающего
контура; – фиктивное
сопротивление, электрические потери
в котором при протекании тока
равны потерям
– фиктивное
сопротивление, электрические потери
в котором при протекании тока
равны потерям
 в сердечнике трансформатора;
в сердечнике трансформатора; ,
а М – взаимоиндуктивная связь между
обмотками по основному потоку.
,
а М – взаимоиндуктивная связь между
обмотками по основному потоку.

 -
эквивалентное сопротивление схемы
замещения трансформатора.
-
эквивалентное сопротивление схемы
замещения трансформатора.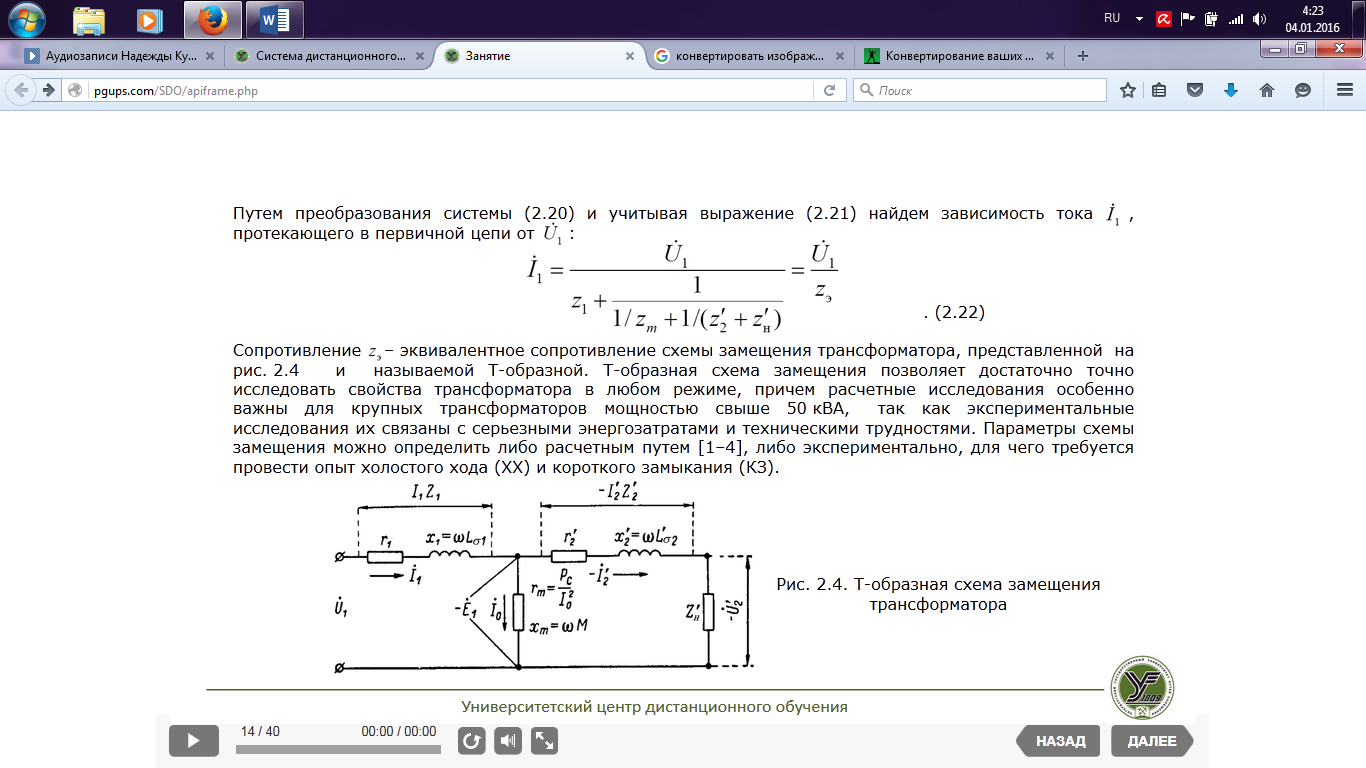
 ).
В этом случае уравнения U
и НС можно записать:
).
В этом случае уравнения U
и НС можно записать:


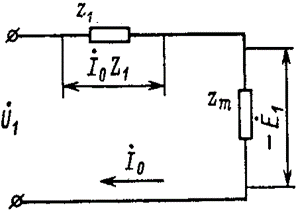 хема
замещения трансформатора в режиме
ХХ упростится и примет вид
хема
замещения трансформатора в режиме
ХХ упростится и примет вид при номинальном напряжении
при номинальном напряжении
 в трансформаторе мал и составляет не
более (5-10)%
в трансформаторе мал и составляет не
более (5-10)%
 ,
то при
и поток Ф в сердечнике будет номинальным,
а потери на гистерезис и вихревые
токи в стали магнитопровода будут
такими же, как при номинальной нагрузке.
,
то при
и поток Ф в сердечнике будет номинальным,
а потери на гистерезис и вихревые
токи в стали магнитопровода будут
такими же, как при номинальной нагрузке. трансформатора – это потери в стали
магнитопровода.
трансформатора – это потери в стали
магнитопровода.

 и параметры схемы замещения
и параметры схемы замещения

 ,
,
 называются параметрами
ХХ.
называются параметрами
ХХ. в десятки и сотни раз меньше
в десятки и сотни раз меньше
 .
Поэтому с большей точностью можно
считать параметры ХХ равны параметрам
намагничивающей цепи:
.
Поэтому с большей точностью можно
считать параметры ХХ равны параметрам
намагничивающей цепи:
 ;
;


 ,
, ),
при этом вторичное напряжение
),
при этом вторичное напряжение
 .
Если в этом режиме к первичной обмотке
подвести номинальное напряжение, то
токи КЗ в обмотках трансформатора,
будут превышать в 10-20 раз их номинальное
значения.
.
Если в этом режиме к первичной обмотке
подвести номинальное напряжение, то
токи КЗ в обмотках трансформатора,
будут превышать в 10-20 раз их номинальное
значения.
 .
Напряжение, при котором токи в обмотках
трансформатора равны номинальным
значениям, называют номинальным
напряжением КЗ и
обычно выражают его в % от номинального:
.
Напряжение, при котором токи в обмотках
трансформатора равны номинальным
значениям, называют номинальным
напряжением КЗ и
обычно выражают его в % от номинального:
 При этом основной поток в сердечнике
трансформатора Ф и необходимая для
его создания намагничивающая сила
При этом основной поток в сердечнике
трансформатора Ф и необходимая для
его создания намагничивающая сила
 настолько невелики, что ими можно
пренебречь.
настолько невелики, что ими можно
пренебречь.
 или
или



 ,
,

 – параметры
КЗ.
– параметры
КЗ.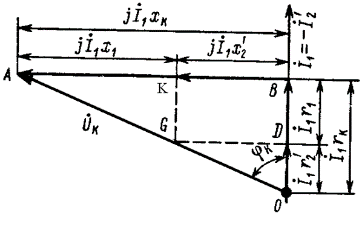
 . Треугольник 0ВА называют треугольником
КЗ.
. Треугольник 0ВА называют треугольником
КЗ.
 и
и
 называется активной и реактивной
составляющими КЗ напряжения
называется активной и реактивной
составляющими КЗ напряжения
 .
. в этом режиме будут в основном потерями
в меди обмоток:
в этом режиме будут в основном потерями
в меди обмоток:




 и отдаваемую
и отдаваемую
 активные мощности, токи в обмотках
активные мощности, токи в обмотках
 ,
напряжение на нагрузке
,
напряжение на нагрузке
 и другие величины.
и другие величины. основной поток Ф будет постоянен.
основной поток Ф будет постоянен. , проведем его в положительном
направлении оси.
, проведем его в положительном
направлении оси. и
и
 отстают от него на угол 90
отстают от него на угол 90 .
. при активно – индуктивной нагрузке
отстает на
при активно – индуктивной нагрузке
отстает на
 на угол
на угол
 (
( )
) находим
как геометрическую сумму токов
находим
как геометрическую сумму токов
 -
.
-
. .
строятся по уравнению (1) соответственно
первичной и вторичной обмоток,
записанные в виде:
.
строятся по уравнению (1) соответственно
первичной и вторичной обмоток,
записанные в виде:


 и
и
 на первичной обмотке (из билета 3.8
диаграмма), суммарное значение которых
не превышает в пределах номинальных
нагрузок 3-5% от
.
При сделанном допущении схема замещения
приобретает вид
на первичной обмотке (из билета 3.8
диаграмма), суммарное значение которых
не превышает в пределах номинальных
нагрузок 3-5% от
.
При сделанном допущении схема замещения
приобретает вид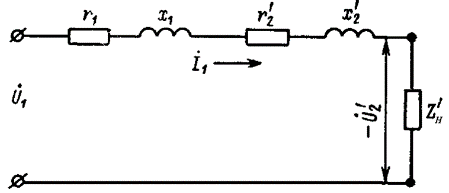
 акой
схеме замещения соответствует
диаграмма, где треугольник АВС
представляет собой треугольник КЗ
(треугольник находится в билете 3.6).
акой
схеме замещения соответствует
диаграмма, где треугольник АВС
представляет собой треугольник КЗ
(треугольник находится в билете 3.6). ,
то род нагрузки (угол
,
то род нагрузки (угол
 )
, то из упрощенной диаграммы видно,
что вторичное напряжение получается
путем пристраивания к вектору
напряжения
)
, то из упрощенной диаграммы видно,
что вторичное напряжение получается
путем пристраивания к вектору
напряжения
 треугольника КЗ АВС.
треугольника КЗ АВС. ,
режима КЗ, определяемого треугольником
КЗ АВС.
,
режима КЗ, определяемого треугольником
КЗ АВС. к потребляемой активной мощности
к потребляемой активной мощности
 :
:

 .
.


 трансформатора при работе под нагрузкой
практически равны потерям холостого
хода при одинаковом питающем напряжении,
т е
трансформатора при работе под нагрузкой
практически равны потерям холостого
хода при одинаковом питающем напряжении,
т е

 при
номинальном токе, запишем выражение
для потерь в меди обмоток при любой
нагрузке:
при
номинальном токе, запишем выражение
для потерь в меди обмоток при любой
нагрузке:

 и напряжение
и напряжение
 , т е ее номинальную полную мощность
, т е ее номинальную полную мощность
 ,
а также род нагрузки (
,
а также род нагрузки ( ),
удобнее отдаваемую мощность записать
:
),
удобнее отдаваемую мощность записать
:

 (1)
(1)

 ,
а отсюда следует , что КПД достигает
максимума при такой нагрузке, при
которой потери в меди равны потерям
в стали.
,
а отсюда следует , что КПД достигает
максимума при такой нагрузке, при
которой потери в меди равны потерям
в стали. при увеличении от ХХ до номинальной
и выраженное в процентах от номинального
вторичного напряжения
при увеличении от ХХ до номинальной
и выраженное в процентах от номинального
вторичного напряжения

 (1)
(1) з
точки А опустим перпендикуляр на
продолжение вектора
з
точки А опустим перпендикуляр на
продолжение вектора
 и получим точку D.
и получим точку D.
 (2).
(2). по (2), получим формулу для расчета
изменения вторичного напряжения при
номинальном токе нагрузки:
по (2), получим формулу для расчета
изменения вторичного напряжения при
номинальном токе нагрузки:
 (3)
(3) при любой нагрузке, в (3) следует ввести
коэффициент нагрузки или активной
вторичной мощности
при любой нагрузке, в (3) следует ввести
коэффициент нагрузки или активной
вторичной мощности


 при
при

 ),
активно-индуктивной (
),
активно-индуктивной ( )
и активно-емкостной (
)
нагрузок.
)
и активно-емкостной (
)
нагрузок.
 и
и
 значения
находятся в диапазоне (5-8)%
значения
находятся в диапазоне (5-8)%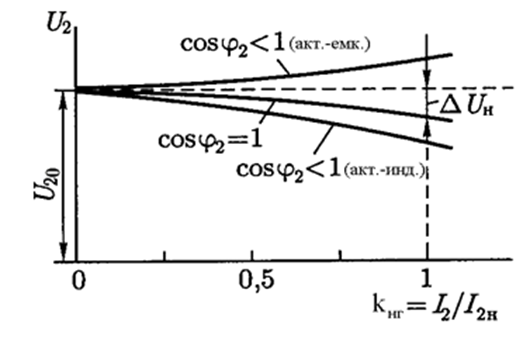
 между соответствующими линейными
напряжениями первичной и вторичной
обмоток в режиме холостого хода.
между соответствующими линейными
напряжениями первичной и вторичной
обмоток в режиме холостого хода.
 .
.
 на зажимах первичной и вторичной
обмоток трансформатора совпадают по
фазе и изображаются двумя векторами
и
на зажимах первичной и вторичной
обмоток трансформатора совпадают по
фазе и изображаются двумя векторами
и
 ‚ равными по величине и одинаково
направленными (рис. б). Угол а в данном
случае равен 0°.
‚ равными по величине и одинаково
направленными (рис. б). Угол а в данном
случае равен 0°.
 .
При соединении обмоток по схеме У/
.
При соединении обмоток по схеме У/ ,
при одинаковой маркировке выводов и
одном направлении намотки обеих
обмоток, получим, как наглядно показано
на рис. 2.16, группу 11, а если поменять
начала и концы фаз одной из обмоток,
то получим группу 5.
,
при одинаковой маркировке выводов и
одном направлении намотки обеих
обмоток, получим, как наглядно показано
на рис. 2.16, группу 11, а если поменять
начала и концы фаз одной из обмоток,
то получим группу 5.
 от
их среднего значения.
от
их среднего значения.
 от
их среднеарифметического значения.
от
их среднеарифметического значения.

 и
и  ‚ что соответствует векторной диаграмме. Для этого момента времени ось результирующего потока Ф статора, направлена по оси фазы А, то есть горизонтально.
Рассматриваемая машина, как видно из рис.3.4‚ а, имеет число полюсов 2р = 2 или число пар полюсов р = 1. Действительно, во всю левую половину статорной расточки входят силовые линии магнитного поля из воздушного зазора, что соответствует полюсу южной полярности S, а правая половина расточки статора - полюсу северной полярности N. Часть окружности расточки статора диаметром Da, приходящаяся на один полюс называется полюсной дугой Ʈ и равна
‚ что соответствует векторной диаграмме. Для этого момента времени ось результирующего потока Ф статора, направлена по оси фазы А, то есть горизонтально.
Рассматриваемая машина, как видно из рис.3.4‚ а, имеет число полюсов 2р = 2 или число пар полюсов р = 1. Действительно, во всю левую половину статорной расточки входят силовые линии магнитного поля из воздушного зазора, что соответствует полюсу южной полярности S, а правая половина расточки статора - полюсу северной полярности N. Часть окружности расточки статора диаметром Da, приходящаяся на один полюс называется полюсной дугой Ʈ и равна  .(3.1)
.(3.1)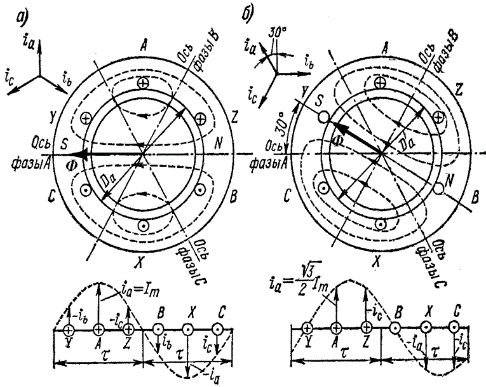
 ‚ где
‚ где  - частота питающего тока.
Если каждую из фаз представить в виде двух витков, сдвинутых друг относительно друга на половину окружности расточки статора (рис.3.5)‚ и соединить их последовательно, то получится четырехполюсная машина (2р=4). Кривая распределения токов вдоль развернутого статора содержит уже две синусоиды.
Чтобы сохранить привычный период синусоиды 2π радиан или 360°, в теории электрических машин переходят к электрическим градусам, при которых окружность содержит р*360° . В дальнейшем будем иметь в виду только электрические градусы.
Очевидно, что в случае на рис.3.5 поле также будет вращающимся, и за один период изменения тока повернется на 2Ʈ или в данном случае на половину окружности. Иначе говоря, частота вращения поля в этом случае
- частота питающего тока.
Если каждую из фаз представить в виде двух витков, сдвинутых друг относительно друга на половину окружности расточки статора (рис.3.5)‚ и соединить их последовательно, то получится четырехполюсная машина (2р=4). Кривая распределения токов вдоль развернутого статора содержит уже две синусоиды.
Чтобы сохранить привычный период синусоиды 2π радиан или 360°, в теории электрических машин переходят к электрическим градусам, при которых окружность содержит р*360° . В дальнейшем будем иметь в виду только электрические градусы.
Очевидно, что в случае на рис.3.5 поле также будет вращающимся, и за один период изменения тока повернется на 2Ʈ или в данном случае на половину окружности. Иначе говоря, частота вращения поля в этом случае  . В общем случае можно выполнить обмотку с любым числом полюсов, которое определяет частоту вращения магнитного поля:
. В общем случае можно выполнить обмотку с любым числом полюсов, которое определяет частоту вращения магнитного поля:

 или
или 

 , основной частоты (рис.3.7). Так как шагу обмотки соответствует угол сдвига βπ, то и ЭДС
, основной частоты (рис.3.7). Так как шагу обмотки соответствует угол сдвига βπ, то и ЭДС  , в проводнике 2 тоже будет сдвинута на угол βπ относительно
, очевидно, что ЭДС витка
, в проводнике 2 тоже будет сдвинута на угол βπ относительно
, очевидно, что ЭДС витка  С учетом равенства действующих значений ЭДС проводников 1 и 2
С учетом равенства действующих значений ЭДС проводников 1 и 2  из ΔOAB найдем
из ΔOAB найдем
 ‚ (3.3)
где
‚ (3.3)
где  — коэффициент укорочения шага обмотки первой гармоники
ЭДС. Для высших гармоник с номером v коэффициент укорочения
— коэффициент укорочения шага обмотки первой гармоники
ЭДС. Для высших гармоник с номером v коэффициент укорочения 
 магнитного поля и среднем её значении
магнитного поля и среднем её значении  , действующее значение ЭДС проводника
, действующее значение ЭДС проводника  где
где  — поток одного полюса, l — длина статора (или ротора). Подставив полученное значение Eпр в (3.3) найдем
— поток одного полюса, l — длина статора (или ротора). Подставив полученное значение Eпр в (3.3) найдем
 (3.4)
Группа последовательно соединенных витков, уложенных в одни и те же пазы и имеющие общую пазовую изоляцию, называется катушкой. Если катушка содержит их витков, то ее ЭДС равна
(3.4)
Группа последовательно соединенных витков, уложенных в одни и те же пазы и имеющие общую пазовую изоляцию, называется катушкой. Если катушка содержит их витков, то ее ЭДС равна
 (3.5)
Совокупность последовательно соединенных катушек q, лежащих в соседних пазах и принадлежащих одной фазe, называется катушечной группой. Величину q еще называют числом пазов на полюс и фазу
(3.5)
Совокупность последовательно соединенных катушек q, лежащих в соседних пазах и принадлежащих одной фазe, называется катушечной группой. Величину q еще называют числом пазов на полюс и фазу  Угол сдвига y между соседними пазами равен
Угол сдвига y между соседними пазами равен  , при этом катушечная группа из q
катушек занимает по расточке статора (или по поверхности ротора) угол
, при этом катушечная группа из q
катушек занимает по расточке статора (или по поверхности ротора) угол , который называется углом фазной зоны. Симметричную трехфазную обмотку можно выполнить с фазными зонами α=60° и α = 120°. Предпочтение отдается обмотке с фазной зоной α=60°, при которой требуется на 15 % меньше витков (или меди) обмотки, чем при α = 120°, для получения одинаковой ЭДС.
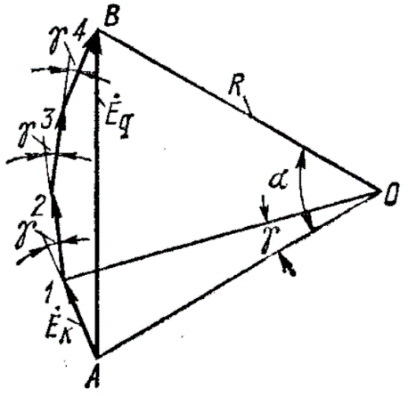
ЭДС катушечной группы Еq равна геометрической сумме ЭДС отдельных катушек группы (рис.3.8.) и меньше арифметической суммы ЭДС этих катушек qEK . Отношение
, который называется углом фазной зоны. Симметричную трехфазную обмотку можно выполнить с фазными зонами α=60° и α = 120°. Предпочтение отдается обмотке с фазной зоной α=60°, при которой требуется на 15 % меньше витков (или меди) обмотки, чем при α = 120°, для получения одинаковой ЭДС.
ЭДС катушечной группы Еq равна геометрической сумме ЭДС отдельных катушек группы (рис.3.8.) и меньше арифметической суммы ЭДС этих катушек qEK . Отношение  называется коэффициентом распределения обмотки. Вокруг фигуры (рис.3.8)‚ образованной векторами
называется коэффициентом распределения обмотки. Вокруг фигуры (рис.3.8)‚ образованной векторами  можно описать окружность радиусом R. На основании этого рисунка можно записать
можно описать окружность радиусом R. На основании этого рисунка можно записать  Тогда коэффициент распределения обмотки равен:
Тогда коэффициент распределения обмотки равен:
 (3.6)
(3.6)
 (3.7)
В фазе может содержаться n последовательно соединенных катушечных групп. В наиболее распространенном случае все группы содержат одинаковое число катушек и соединены так, что ЭДС групп будут складываться арифметически. Следовательно, ЭДС фазы рассчитывается как
(3.7)
В фазе может содержаться n последовательно соединенных катушечных групп. В наиболее распространенном случае все группы содержат одинаковое число катушек и соединены так, что ЭДС групп будут складываться арифметически. Следовательно, ЭДС фазы рассчитывается как
 (3.8)
где
(3.8)
где  - обмоточный коэффициент, а
- обмоточный коэффициент, а  - число витков фазы.
- число витков фазы.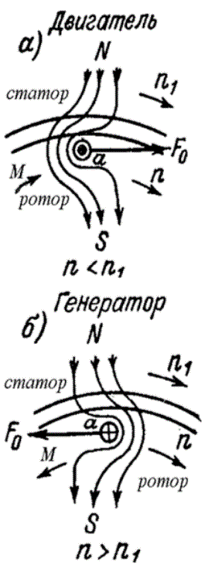
 и
и  .
Условимся, что взаимная индукция между статором и ротором обуславливается только основной гармоникой магнитного поля в воздушном зазоре, а высшие гармоники этого поля относятся к рассеянию и учитываются в индуктивных сопротивлениях рассеяния.
Таким образом, при n=0 АМ представляет собой по сути трансформатор с воздушным зазором в магнитопроводе. В такой АМ происходит преобразование электрической энергии одного напряжения в электрическую энергию другого напряжения с коэффициентом трансформации kU (или коэффициентом приведения напряжения)
.
Условимся, что взаимная индукция между статором и ротором обуславливается только основной гармоникой магнитного поля в воздушном зазоре, а высшие гармоники этого поля относятся к рассеянию и учитываются в индуктивных сопротивлениях рассеяния.
Таким образом, при n=0 АМ представляет собой по сути трансформатор с воздушным зазором в магнитопроводе. В такой АМ происходит преобразование электрической энергии одного напряжения в электрическую энергию другого напряжения с коэффициентом трансформации kU (или коэффициентом приведения напряжения) (3.10)
При вращающемся роторе (n≠0, s≠1) частота пересечения магнитным полем проводников ротора пропорциональна разности скоростей n1-n‚ и, следовательно, частота роторных токов будет
(3.10)
При вращающемся роторе (n≠0, s≠1) частота пересечения магнитным полем проводников ротора пропорциональна разности скоростей n1-n‚ и, следовательно, частота роторных токов будет  Учитывая следующее из (3.9) равенство n=n1(1-s)‚ найдем
Учитывая следующее из (3.9) равенство n=n1(1-s)‚ найдем
 (3.11)
Итак, при вращающемся роторе АМ частоты статорных и роторных токов разные (f2=sf1) ‚что осложняет анализ работы АМ, например делает невозможным построение векторных диаграмм.
Магнитное поле, созданное роторной обмоткой, вращается относительно статора с частотой
(3.11)
Итак, при вращающемся роторе АМ частоты статорных и роторных токов разные (f2=sf1) ‚что осложняет анализ работы АМ, например делает невозможным построение векторных диаграмм.
Магнитное поле, созданное роторной обмоткой, вращается относительно статора с частотой  . Значит магнитные поля статора и ротора как при вращающемся, так и неподвижном роторе, вращаются синхронно и образуют общее вращающееся поле. А это обстоятельство позволяет привести режим работы АМ при вращающемся роторе к режиму работы с неподвижным ротором, то есть по сути к трансформатору и использовать механизм анализа работы
Трансформатора.
Условимся обозначать ЭДС во вторичной обмотке при неподвижном роторе
‚ а величину ЭДС при том же потоке, но при любом n=0
. Значит магнитные поля статора и ротора как при вращающемся, так и неподвижном роторе, вращаются синхронно и образуют общее вращающееся поле. А это обстоятельство позволяет привести режим работы АМ при вращающемся роторе к режиму работы с неподвижным ротором, то есть по сути к трансформатору и использовать механизм анализа работы
Трансформатора.
Условимся обозначать ЭДС во вторичной обмотке при неподвижном роторе
‚ а величину ЭДС при том же потоке, но при любом n=0  . Очевидно, что E2s=sE2 . Предположим, что
активное сопротивление роторной обмотки r2=const и индуктивность, обусловленная вторичными потоками рассеяния
. Очевидно, что E2s=sE2 . Предположим, что
активное сопротивление роторной обмотки r2=const и индуктивность, обусловленная вторичными потоками рассеяния  . Тогда, индуктивное сопротивление рассеяния роторной обмотки при любом s равно
. Тогда, индуктивное сопротивление рассеяния роторной обмотки при любом s равно  . Величина полного сопротивления роторной обмотки при
неподвижном роторе равна
‚ а при вращающемся
. Величина полного сопротивления роторной обмотки при
неподвижном роторе равна
‚ а при вращающемся  .
Уравнение ЭДС для вторичной цепи при любом скольжении имеет вид
.
Уравнение ЭДС для вторичной цепи при любом скольжении имеет вид
 (3.12)
откуда величина вторичного тока определяется
(3.12)
откуда величина вторичного тока определяется
 (3.13)
В левой части равенства (3.13) стоит комплекс вторичного тока при вращающемся роторе, который и при переходе к эквивалентному режиму с неподвижным ротором остается неизменным. В правой части равенства (3.13) находятся величины
и х2 при неподвижном роторе, но вместо активного сопротивления r2 при n = 0 вторичная цепь при переходе имеет сопротивление r2/s. Таким образом для эквивалентного перехода от режима при вращающемся роторе к режиму с неподвижным ротором достаточно увеличить активное сопротивление фазы на величину r2q, равную
(3.13)
В левой части равенства (3.13) стоит комплекс вторичного тока при вращающемся роторе, который и при переходе к эквивалентному режиму с неподвижным ротором остается неизменным. В правой части равенства (3.13) находятся величины
и х2 при неподвижном роторе, но вместо активного сопротивления r2 при n = 0 вторичная цепь при переходе имеет сопротивление r2/s. Таким образом для эквивалентного перехода от режима при вращающемся роторе к режиму с неподвижным ротором достаточно увеличить активное сопротивление фазы на величину r2q, равную
 (3.14)
Ток I2 при переходе не изменится по величине и по фазе, поэтому и ток I1 остается тем же по величине и фазе, то есть остается неизменной мощность, потребляемая из сети. Так как электрические потери в первичной и вторичной обмотках останутся прежними, то мощность развиваемая АМ на роторе при её вращении будет равна электрической мощности на сопротивлении r2q,
(3.14)
Ток I2 при переходе не изменится по величине и по фазе, поэтому и ток I1 остается тем же по величине и фазе, то есть остается неизменной мощность, потребляемая из сети. Так как электрические потери в первичной и вторичной обмотках останутся прежними, то мощность развиваемая АМ на роторе при её вращении будет равна электрической мощности на сопротивлении r2q,
 (3.15)
Оценим очень важную особенность работы асинхронной машины в генераторном режиме на базе выражения (3.13) роторного тока
(3.15)
Оценим очень важную особенность работы асинхронной машины в генераторном режиме на базе выражения (3.13) роторного тока  . Для этого умножим числитель и знаменатель правой части выражения (3.13) на сопряжённый комплекс знаменателя и получим
. Для этого умножим числитель и знаменатель правой части выражения (3.13) на сопряжённый комплекс знаменателя и получим
 (3.16)
где
(3.16)
где  и
и  - соответственно активная и реактивная составляющие роторного тока
- соответственно активная и реактивная составляющие роторного тока  .
В генераторном режиме скольжение s < О и
, как видно из (3.16)‚ изменит знак на противоположный относительно двигательного режима, что приведет к изменению направления действия момента, развиваемого на роторе, то есть превращению его из вращающего, в режиме двигателя, в тормозной, в режиме генератора.
Реактивная составляющая роторного тока
, как следует из (3.16)‚ не меняет свой знак при любом скольжении, так как зависит от s2 . Следовательно, асинхронная машина потребляет реактивную мощность как в двигательном, так и в генераторном режимах. А это, как уже отмечалось выше, являясь существенным недостатком, ограничивает возможность широкого использования асинхронных генераторов.
.
В генераторном режиме скольжение s < О и
, как видно из (3.16)‚ изменит знак на противоположный относительно двигательного режима, что приведет к изменению направления действия момента, развиваемого на роторе, то есть превращению его из вращающего, в режиме двигателя, в тормозной, в режиме генератора.
Реактивная составляющая роторного тока
, как следует из (3.16)‚ не меняет свой знак при любом скольжении, так как зависит от s2 . Следовательно, асинхронная машина потребляет реактивную мощность как в двигательном, так и в генераторном режимах. А это, как уже отмечалось выше, являясь существенным недостатком, ограничивает возможность широкого использования асинхронных генераторов.  где
где  - намагничивающий ток. В АМ из — за наличия воздушного зазора
=(40÷60)%I1н при U1н‚ а не (5÷10)% I1н как I0 у трансформатора. В АМ число фаз обмоток статора m1 и ротора m2 может быть разным, поэтому и коэффициент приведения по току ki отличается от ku по (3.1О) и равен
- намагничивающий ток. В АМ из — за наличия воздушного зазора
=(40÷60)%I1н при U1н‚ а не (5÷10)% I1н как I0 у трансформатора. В АМ число фаз обмоток статора m1 и ротора m2 может быть разным, поэтому и коэффициент приведения по току ki отличается от ku по (3.1О) и равен
 (З.18)
Соответственно из-за этой особенности приведенные активное и индуктивное сопротивления приведенной роторной обмотки, в отличии от выражений (2.16) и (2.17) по [6] ‚ определяются как
(З.18)
Соответственно из-за этой особенности приведенные активное и индуктивное сопротивления приведенной роторной обмотки, в отличии от выражений (2.16) и (2.17) по [6] ‚ определяются как  и
и  Системе уравнений (3.17) соответствует Т-образная схема замещения АМ, представленная на рис.3.10, а. Также как и у трансформаторов эта схема имеет четкий физический смысл, но для проведения численных исследований асинхронных машин более удобна Г-образная схема, у которой намагничивающий контур вынесен на входные зажимы схемы замещения (рис.3.10, б). Удобство Г-образной схемы замещения для практических расчетов состоит в том, что, так как сопротивления ее намагничивающего контура z1+zm зависят от скольжения s, то при U1 = const и f1 = const также I00=const. Ток намагничивающего контура I00 еще называют током идеального холостого хода (s = 0).
Системе уравнений (3.17) соответствует Т-образная схема замещения АМ, представленная на рис.3.10, а. Также как и у трансформаторов эта схема имеет четкий физический смысл, но для проведения численных исследований асинхронных машин более удобна Г-образная схема, у которой намагничивающий контур вынесен на входные зажимы схемы замещения (рис.3.10, б). Удобство Г-образной схемы замещения для практических расчетов состоит в том, что, так как сопротивления ее намагничивающего контура z1+zm зависят от скольжения s, то при U1 = const и f1 = const также I00=const. Ток намагничивающего контура I00 еще называют током идеального холостого хода (s = 0).
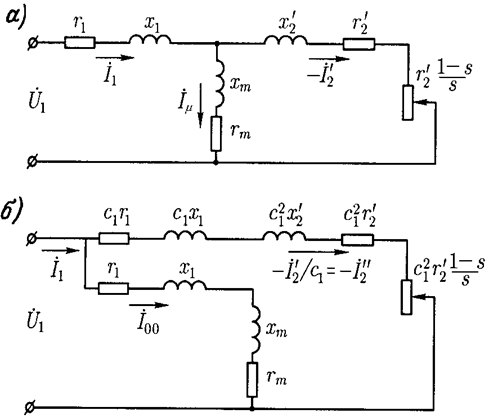 Рис.3.10. Т-образная(а) и Г-образная(б) схемы замещения АМ
Г-образная схема замещения получается из Т-образной путем перехода от тока вторичной обмотки
Рис.3.10. Т-образная(а) и Г-образная(б) схемы замещения АМ
Г-образная схема замещения получается из Т-образной путем перехода от тока вторичной обмотки  к новому току
к новому току  по равенству
по равенству  . Комплекс
. Комплекс  его модуль равен отношению U1 ЭДС Е1 при идеальном холостом ходе, а аргумент — углу между векторами
его модуль равен отношению U1 ЭДС Е1 при идеальном холостом ходе, а аргумент — углу между векторами  и
и  . Для асинхронных машин мощностью выше киловатта модуль комплекса
. Для асинхронных машин мощностью выше киловатта модуль комплекса  мало отличается от единицы и лежит в диапазоне 1.02÷1.06 [1-5],поэтому без внесения существенной погрешности, будем пользоваться не комплексом
мало отличается от единицы и лежит в диапазоне 1.02÷1.06 [1-5],поэтому без внесения существенной погрешности, будем пользоваться не комплексом  ‚ а его модулем с1.
‚ а его модулем с1.


 представляет
собой полную механическую мощность,
развиваемую двигателем.
представляет
собой полную механическую мощность,
развиваемую двигателем. . Часть этой мощности теряется на покрытие электрических потерь в обмотке статора
. Часть этой мощности теряется на покрытие электрических потерь в обмотке статора  и магнитные потери в сердечнике статора
и магнитные потери в сердечнике статора  . Оставшаяся часть представляет собой
электромагнитную мощность, передаваемую магнитным полем статора на ротор. На схеме замещения – это мощность на полном активном сопротивлении
. Оставшаяся часть представляет собой
электромагнитную мощность, передаваемую магнитным полем статора на ротор. На схеме замещения – это мощность на полном активном сопротивлении  вторичной цепи.
вторичной цепи.
 (З.19)
(З.19)
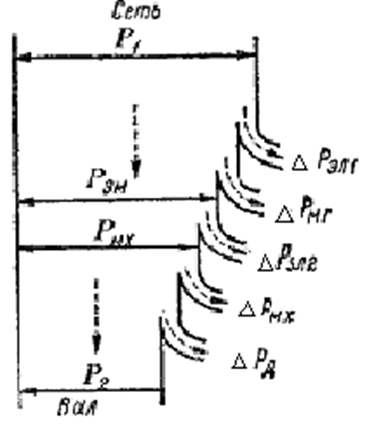
 . Сопоставляя последнее выражение с выражением (3.19)‚ нетрудно установить, что
. Сопоставляя последнее выражение с выражением (3.19)‚ нетрудно установить, что  ‚то есть чем меньше скольжение или выше частота вращения ротора, тем меньше потери в роторной обмотке.
Остальная часть электромагнитной мощности превращается в механическую мощность
‚то есть чем меньше скольжение или выше частота вращения ротора, тем меньше потери в роторной обмотке.
Остальная часть электромагнитной мощности превращается в механическую мощность  , развиваемую на роторе:
, развиваемую на роторе:
 (3.20)
Магнитные потери в стали ротора очень малы, поэтому, как правило, ими пренебрегают. Часть механической мощности
теряется в виде механических потерь в самой машине
(3.20)
Магнитные потери в стали ротора очень малы, поэтому, как правило, ими пренебрегают. Часть механической мощности
теряется в виде механических потерь в самой машине  (на вентиляцию, трение в подшипниках и щетках в АМ с фазным ротором) и добавочных потерь pд, обусловленных в основном высшими гармониками магнитного поля. Наконец, полезная мощность на валу двигателя равна
(на вентиляцию, трение в подшипниках и щетках в АМ с фазным ротором) и добавочных потерь pд, обусловленных в основном высшими гармониками магнитного поля. Наконец, полезная мощность на валу двигателя равна . Сумма потерь в асинхронном двигателе составляет‚
. Сумма потерь в асинхронном двигателе составляет‚ ‚а коэффициент полезного действия равен
‚а коэффициент полезного действия равен
 (3.21)
КПД трехфазных асинхронных двигателей мощностью от 1 до 1000 кВт находится в диапазоне (72 ÷ 95) %.
(3.21)
КПД трехфазных асинхронных двигателей мощностью от 1 до 1000 кВт находится в диапазоне (72 ÷ 95) %.

 (3.22)
По Г-образной схеме на рис.3.10, б найдем величину приведенного вторичного тока
(3.22)
По Г-образной схеме на рис.3.10, б найдем величину приведенного вторичного тока  . Подставив это значение тока
. Подставив это значение тока  в (3.22) получим выражение для электромагнитного момента
в (3.22) получим выражение для электромагнитного момента
 (3.23)
Анализ выражения (З.23) указывает на наличие двух точек максимума в зависимости М = f(s)‚ поскольку в точках s=-∞; 0 и +∞ момент М = 0 . Скольжение, при котором момент имеет максимальное значение (критическое скольжение sкр), можно определить взяв производную dM/ds и приняв ее нулю. Решая уравнение dM/ds=0 относительно s найдем
(3.23)
Анализ выражения (З.23) указывает на наличие двух точек максимума в зависимости М = f(s)‚ поскольку в точках s=-∞; 0 и +∞ момент М = 0 . Скольжение, при котором момент имеет максимальное значение (критическое скольжение sкр), можно определить взяв производную dM/ds и приняв ее нулю. Решая уравнение dM/ds=0 относительно s найдем  Подставив значение sкр в выражение (3.23) получим
Подставив значение sкр в выражение (3.23) получим
 (3.24)
Знак плюс в выражениях
(3.24)
Знак плюс в выражениях  и
и  соответствует режиму двигателя АМ, а знак минус — генераторному режиму. Из (3.24) видно, что значение
в генераторном режиме больше, чем в двигательном.
Механической характеристикой АМ, строго говоря, называют зависимость полезного момента М2 на валу от скольжения s (или частоты вращения n) при U1=const и f1=const. Электромагнитный момент M = M2 + M0‚ где М0 - момент, обусловленный потерями ΔpМХ и Δpд. Поскольку М0 значительно меньше М2 и М ‚ то им или пренебрегают, или относят его к Мст — моменту механизма, приводимого во
вращение асинхронным двигателем. Поэтому М практически равен М2, и в качестве механической характеристики будем рассматривать зависимость М = f(s). На рис.3.12 показана механическая характеристика АМ, рассчитанная по (З.23) для всех трех возможных режимов работы. Момент при s =1 ‚ называют пусковым МП. Номинальный момент МН, как отмечалось выше, будет при номинальном скольжении, лежащем в диапазоне (0‚О1 ÷ 0,08).
соответствует режиму двигателя АМ, а знак минус — генераторному режиму. Из (3.24) видно, что значение
в генераторном режиме больше, чем в двигательном.
Механической характеристикой АМ, строго говоря, называют зависимость полезного момента М2 на валу от скольжения s (или частоты вращения n) при U1=const и f1=const. Электромагнитный момент M = M2 + M0‚ где М0 - момент, обусловленный потерями ΔpМХ и Δpд. Поскольку М0 значительно меньше М2 и М ‚ то им или пренебрегают, или относят его к Мст — моменту механизма, приводимого во
вращение асинхронным двигателем. Поэтому М практически равен М2, и в качестве механической характеристики будем рассматривать зависимость М = f(s). На рис.3.12 показана механическая характеристика АМ, рассчитанная по (З.23) для всех трех возможных режимов работы. Момент при s =1 ‚ называют пусковым МП. Номинальный момент МН, как отмечалось выше, будет при номинальном скольжении, лежащем в диапазоне (0‚О1 ÷ 0,08).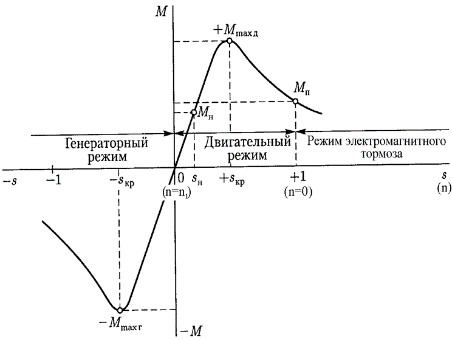
 . Это сказывается на эксплуатационных свойствах АД. Например, как следует из выражения (З.23)‚ при снижении напряжения сети на 10 % (U1=0,9U1H)момент М уменьшится на 19% по сравнению с моментом при U1H
Очень важное практическое значение имеет соотношение M/Mmax для АД, которое можно получить разделив выражение (3.23) на (З.24) и проведя несложное преобразование правых частей
. Это сказывается на эксплуатационных свойствах АД. Например, как следует из выражения (З.23)‚ при снижении напряжения сети на 10 % (U1=0,9U1H)момент М уменьшится на 19% по сравнению с моментом при U1H
Очень важное практическое значение имеет соотношение M/Mmax для АД, которое можно получить разделив выражение (3.23) на (З.24) и проведя несложное преобразование правых частей
 (3.25)
Если пренебречь членами
(3.25)
Если пренебречь членами  ввиду их малости по сравнению с другими, то получим известную формулу Клосса
ввиду их малости по сравнению с другими, то получим известную формулу Клосса
 (3.26)
Формула Клосса позволяет определить Мmax и sкр и построить механическую характеристику АД по известным М и s для каких либо двух режимом работы ‚ например, номинального (МH‚sH) и пускового (МП,s=1).
При sкр = 0,15 ÷ 0,3 погрешность в определении M/MH по формуле Клосса лежит в диапазоне (1О—15)% [1-5]. Более точно механическую характеристику можно построить по (3.25) ‚ даже если неизвестны параметры r1 , r’2 и c1 приняв значение
(3.26)
Формула Клосса позволяет определить Мmax и sкр и построить механическую характеристику АД по известным М и s для каких либо двух режимом работы ‚ например, номинального (МH‚sH) и пускового (МП,s=1).
При sкр = 0,15 ÷ 0,3 погрешность в определении M/MH по формуле Клосса лежит в диапазоне (1О—15)% [1-5]. Более точно механическую характеристику можно построить по (3.25) ‚ даже если неизвестны параметры r1 , r’2 и c1 приняв значение  .
На рис.3.13 представлены механические характеристики АД для трех значений U1 и зависимость Mст=f(s)механизма, приводимого во вращение данным двигателем. Из анализа этого рисунка видно, что изменение питающего напряжения U1 сопровождается изменением пускового МП и максимального Мmax моментов, а также и изменением скольжения s (или частоты вращения ротора) при установившихся режимах работы (точках пересечения кривых Мст и М).
Как видно из рис.3.12 и 3.13, при изменении скольжения в диапазоне 0<s< sкр АД обладает жесткой механической характеристикой, то есть при изменении нагрузки скорость вращения двигателя меняется мало. В этом же диапазоне изменения скольжения, обеспечивается устойчивая работа АД. Например, считаем, что двигатель работает в точке 1 на рис.3.13. Пусть под действием какой то кратковременной причины частота вращения n АД увеличится (или скольжение уменьшится), то есть рабочая точка отклонится от т.1 влево по кривой M=f(s) . Тогда Мст станет больше чем М, на валу АД возникнет тормозной динамический момент, под действием которого частота вращения n начнет уменьшаться и двигатель вернется в т.1. То же самое произойдет и при кратковременном отклонении от т.1 вправо, то есть при увеличении скольжения (или снижении n). В этом случае М станет больше Мст, на валу возникнет положительный динамический момент, частота вращения n начнет увеличиваться и двигатель опять вернется к работе в т.1.
Вполне очевидно, что для всех точек типа 1 механической характеристики в диапазоне 0 < s < sкр выполняется условие dM/dn < dМст/dn, что и является признаком устойчивой работы. При s>sкр для любой точки механической характеристики АД dM/dn > dМст/dn и работа машины будет неустойчивой.
Например, если при работе в каком-то режиме со скольжением s>sкр под воздействием кратковременного возмущения АД увеличит частоту вращения n, то прежняя скорость уже никогда не восстановится, а двигатель будет разгоняться до тех пор ‚пока не придёт в точку типа 1.
.
На рис.3.13 представлены механические характеристики АД для трех значений U1 и зависимость Mст=f(s)механизма, приводимого во вращение данным двигателем. Из анализа этого рисунка видно, что изменение питающего напряжения U1 сопровождается изменением пускового МП и максимального Мmax моментов, а также и изменением скольжения s (или частоты вращения ротора) при установившихся режимах работы (точках пересечения кривых Мст и М).
Как видно из рис.3.12 и 3.13, при изменении скольжения в диапазоне 0<s< sкр АД обладает жесткой механической характеристикой, то есть при изменении нагрузки скорость вращения двигателя меняется мало. В этом же диапазоне изменения скольжения, обеспечивается устойчивая работа АД. Например, считаем, что двигатель работает в точке 1 на рис.3.13. Пусть под действием какой то кратковременной причины частота вращения n АД увеличится (или скольжение уменьшится), то есть рабочая точка отклонится от т.1 влево по кривой M=f(s) . Тогда Мст станет больше чем М, на валу АД возникнет тормозной динамический момент, под действием которого частота вращения n начнет уменьшаться и двигатель вернется в т.1. То же самое произойдет и при кратковременном отклонении от т.1 вправо, то есть при увеличении скольжения (или снижении n). В этом случае М станет больше Мст, на валу возникнет положительный динамический момент, частота вращения n начнет увеличиваться и двигатель опять вернется к работе в т.1.
Вполне очевидно, что для всех точек типа 1 механической характеристики в диапазоне 0 < s < sкр выполняется условие dM/dn < dМст/dn, что и является признаком устойчивой работы. При s>sкр для любой точки механической характеристики АД dM/dn > dМст/dn и работа машины будет неустойчивой.
Например, если при работе в каком-то режиме со скольжением s>sкр под воздействием кратковременного возмущения АД увеличит частоту вращения n, то прежняя скорость уже никогда не восстановится, а двигатель будет разгоняться до тех пор ‚пока не придёт в точку типа 1.
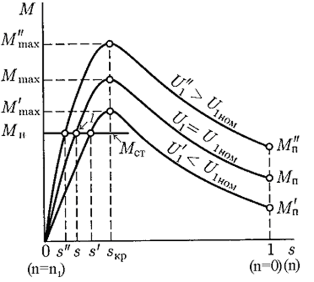 Рис.3.13 Механическая характеристика АД при разных U1
На рис.3.14 представлены механические характеристики АД с фазным ротором при увеличении активного сопротивления ротора (
Рис.3.13 Механическая характеристика АД при разных U1
На рис.3.14 представлены механические характеристики АД с фазным ротором при увеличении активного сопротивления ротора ( ). Введение добавочного сопротивления в цепь ротора не изменяет величину Мmax соответствии с (3.24)‚ но увеличивает значение sкр и пусковой момент. Увеличится также и скольжение в рабочих режимах (sI < sII < sIII < sIV), а с учетом связи Δpэл2 =sPэм потери в роторной обмотке увеличиваются и КПД понизится.
Отношение максимального момента Мmax при номинальном питающем напряжении U1H к номинальному моменту МH определяет перегрузочную способность АД и называется кратностью максимального момента
). Введение добавочного сопротивления в цепь ротора не изменяет величину Мmax соответствии с (3.24)‚ но увеличивает значение sкр и пусковой момент. Увеличится также и скольжение в рабочих режимах (sI < sII < sIII < sIV), а с учетом связи Δpэл2 =sPэм потери в роторной обмотке увеличиваются и КПД понизится.
Отношение максимального момента Мmax при номинальном питающем напряжении U1H к номинальному моменту МH определяет перегрузочную способность АД и называется кратностью максимального момента  Для асинхронных двигателей разных мощностей и частот вращения
Для асинхронных двигателей разных мощностей и частот вращения  лежит в диапазоне (1,7÷2,5)
лежит в диапазоне (1,7÷2,5)
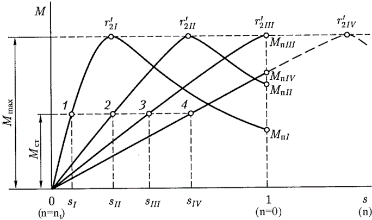 Рис.3.14 Механические характеристики АД при изменении r’2
АД с фазным ротором можно пускать в ход с помощью реостата, включаемого во вторичную цепь. При этом увеличивается пусковой момент (рис.3.14) и уменьшается пусковой ток I1П,поэтому, не регламентируются для АД с фазным ротором кратности пускового момента
Рис.3.14 Механические характеристики АД при изменении r’2
АД с фазным ротором можно пускать в ход с помощью реостата, включаемого во вторичную цепь. При этом увеличивается пусковой момент (рис.3.14) и уменьшается пусковой ток I1П,поэтому, не регламентируются для АД с фазным ротором кратности пускового момента  и пускового тока
и пускового тока  Для АД с короткозамкнутым ротором
Для АД с короткозамкнутым ротором  = (0,7÷1,8) и
= (0,7÷1,8) и  = (5,5÷7) Основным способом пуска этих двигателей является прямой пуск. Если по условиям падения напряжения в сети прямой пуск невозможен, то применяются различные способы пуска двигателя при пониженном напряжении:
-переключением обмоток статора по схеме “звезда—треугольник”‚ что позволяет уменьшить в 3 раза пусковой ток в сети;
-автотрансформаторный пуск;
-реакторный пуск. [1-4].
= (5,5÷7) Основным способом пуска этих двигателей является прямой пуск. Если по условиям падения напряжения в сети прямой пуск невозможен, то применяются различные способы пуска двигателя при пониженном напряжении:
-переключением обмоток статора по схеме “звезда—треугольник”‚ что позволяет уменьшить в 3 раза пусковой ток в сети;
-автотрансформаторный пуск;
-реакторный пуск. [1-4]. то получим
то получим
 (3.27)
При регулировании частоты вращения n АД изменением f1 нежелательно изменять поток Ф, так как увеличение Ф выше номинального приведёт к насыщению магнитной системы и сильно увеличит намагничивающий ток, а уменьшение Ф снизит степень использования машины, перегрузочную способность и так далее. Поэтому целесообразно поддерживать Ф постоянным, для чего, как следует из (3.27), изменяя f1 следует также пропорционально менять и напряжение, то есть соблюдать условие U1/f1=const. Если при этом поддерживать постоянным и ток I1‚ то получим закон частотного регулирования при обеспечении М = const . Как правило данный закон используется при регулировании частоты вращения от 0 до nH. Повышение n > nH осуществляется, как правило, при U1 = U1H увеличении f1, следовательно при снижении потока, что аналогично ослаблению поля в двигателях постоянного тока. Изменение основных параметров АД при регулировании скорости n представлено на рис 3.16.
Следует отметить, что при значениях f1 близких к 0, сопротивление х1 практически равно нулю, но величина I1r1 будет сопоставима с напряжением U1 что приведёт к необходимости более медленного снижения U1 ‚ чем по закону U1/f1=const. Современные ПЧ выполняются с учётом этого явления, с так называемой (I˟R) компенсацией и зависимость U1 = f(n) на рис 3.16, также как и f1=f(n), можно строить от 0.
Частотное регулирование позволяет плавно изменять частоту вращения n в широком диапазоне, что даёт возможность применения АД в регулируемом электроприводе, например, в электрической тяге.
(3.27)
При регулировании частоты вращения n АД изменением f1 нежелательно изменять поток Ф, так как увеличение Ф выше номинального приведёт к насыщению магнитной системы и сильно увеличит намагничивающий ток, а уменьшение Ф снизит степень использования машины, перегрузочную способность и так далее. Поэтому целесообразно поддерживать Ф постоянным, для чего, как следует из (3.27), изменяя f1 следует также пропорционально менять и напряжение, то есть соблюдать условие U1/f1=const. Если при этом поддерживать постоянным и ток I1‚ то получим закон частотного регулирования при обеспечении М = const . Как правило данный закон используется при регулировании частоты вращения от 0 до nH. Повышение n > nH осуществляется, как правило, при U1 = U1H увеличении f1, следовательно при снижении потока, что аналогично ослаблению поля в двигателях постоянного тока. Изменение основных параметров АД при регулировании скорости n представлено на рис 3.16.
Следует отметить, что при значениях f1 близких к 0, сопротивление х1 практически равно нулю, но величина I1r1 будет сопоставима с напряжением U1 что приведёт к необходимости более медленного снижения U1 ‚ чем по закону U1/f1=const. Современные ПЧ выполняются с учётом этого явления, с так называемой (I˟R) компенсацией и зависимость U1 = f(n) на рис 3.16, также как и f1=f(n), можно строить от 0.
Частотное регулирование позволяет плавно изменять частоту вращения n в широком диапазоне, что даёт возможность применения АД в регулируемом электроприводе, например, в электрической тяге.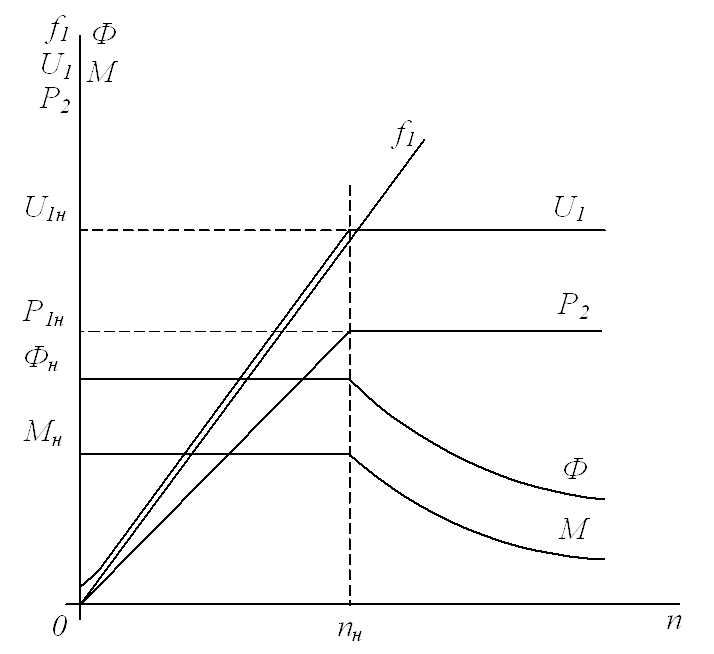
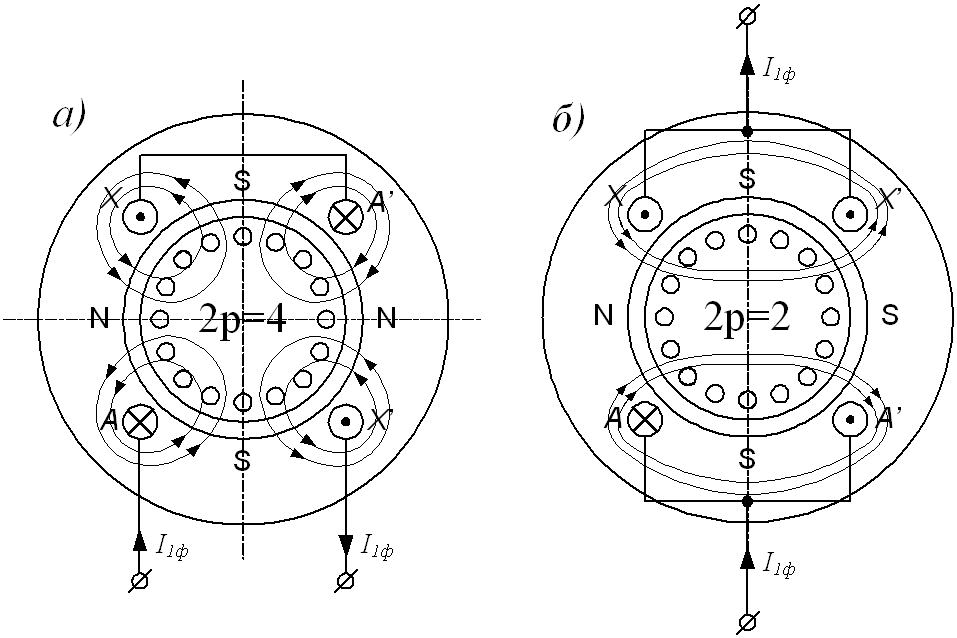
 для обеих частот вращения nY и nYY. Следовательно,
для обеих частот вращения nY и nYY. Следовательно, и
и  ,где U1 - линейное напряжение.
Таким образом P2YY = 2P2Y Но при этом и nYY = 2nY . Следовательно, MY = MYY , а схему соединения статорной обмотки Y/YY называют схемой переключения с M=const. Аналогичным образом несложно показать, что схема соединения Δ/YY является схемой переключения с
,где U1 - линейное напряжение.
Таким образом P2YY = 2P2Y Но при этом и nYY = 2nY . Следовательно, MY = MYY , а схему соединения статорной обмотки Y/YY называют схемой переключения с M=const. Аналогичным образом несложно показать, что схема соединения Δ/YY является схемой переключения с  Регулирование n осуществляется при данном способе большими ступенями, а не плавно как при частотном управлении. Многоскоростные двигатели имеют большие габариты, массу и стоимость по сравнению с двигателями нормального исполнения.
Регулирование n осуществляется при данном способе большими ступенями, а не плавно как при частотном управлении. Многоскоростные двигатели имеют большие габариты, массу и стоимость по сравнению с двигателями нормального исполнения.
 Рис. 3.18 Принципиальная схема соединения обмотки с переключением пар полюсов в отношении 2:1
Регулирование частоты вращения АД изменением скольжения s возможно путем изменения величины питающего напряжения U1 и введение в цепь ротора
добавочного сопротивления.
Рис. 3.18 Принципиальная схема соединения обмотки с переключением пар полюсов в отношении 2:1
Регулирование частоты вращения АД изменением скольжения s возможно путем изменения величины питающего напряжения U1 и введение в цепь ротора
добавочного сопротивления.  5)% от номинальной мощности машины. В СМ небольшой мощности достаточно широко распространено также и магнитоэлектрическое возбуждение (от постоянных магнитов). Полюсные наконечники синхронных машин могут иметь пазы с размещенной в них короткозамкнутой клеткой, аналогичной короткозамкнутой клетке асинхронных двигателей. Эту обмотку в зависимости от режима работы называют успокоительной (демпферной) или пусковой. При вращении ротора синхронно с полем статора эта обмотка не оказывает влияния на работу синхронной машины.
5)% от номинальной мощности машины. В СМ небольшой мощности достаточно широко распространено также и магнитоэлектрическое возбуждение (от постоянных магнитов). Полюсные наконечники синхронных машин могут иметь пазы с размещенной в них короткозамкнутой клеткой, аналогичной короткозамкнутой клетке асинхронных двигателей. Эту обмотку в зависимости от режима работы называют успокоительной (демпферной) или пусковой. При вращении ротора синхронно с полем статора эта обмотка не оказывает влияния на работу синхронной машины.

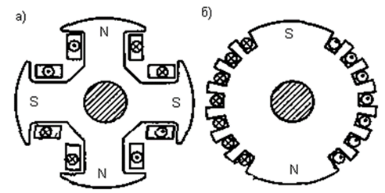
 ‚ , т.к. она определяет частоту тока синхронного генератора (
‚ , т.к. она определяет частоту тока синхронного генератора (  ). При питании обмотки возбуждения постоянным током
). При питании обмотки возбуждения постоянным током  в воздушном зазоре возникает вращающийся с частотой
в воздушном зазоре возникает вращающийся с частотой  , магнитный поток возбуждения
, магнитный поток возбуждения  , , который пересекает лежащие в пазах сердечника статора проводники m-фазной, распределенной по окружности, обмотки. Согласно закону электромагнитной индукции в проводниках возникает ЭДС (ЭДС движения), а на зажимах синхронной машины появляется m-фазная система напряжений. При подключении к зажимам m-фазной нагрузки по обмотке статора начинает протекать m-фазная система токов, которая создает свое вращающееся с частотой
, , который пересекает лежащие в пазах сердечника статора проводники m-фазной, распределенной по окружности, обмотки. Согласно закону электромагнитной индукции в проводниках возникает ЭДС (ЭДС движения), а на зажимах синхронной машины появляется m-фазная система напряжений. При подключении к зажимам m-фазной нагрузки по обмотке статора начинает протекать m-фазная система токов, которая создает свое вращающееся с частотой  поле (поле реакции якоря)
поле (поле реакции якоря) . Два синхронно вращающихся потока
и
, образуют общий вращающийся поток
. Два синхронно вращающихся потока
и
, образуют общий вращающийся поток  . В режиме генератора поле ротора является ведущим по отношению к результирующему полю. Чем больше ток нагрузки, тем больше угол сдвига
. В режиме генератора поле ротора является ведущим по отношению к результирующему полю. Чем больше ток нагрузки, тем больше угол сдвига  между осями поля ротора и результирующего поля в зазоре машины. Этот угол близок по своей величине к углу сдвига между
между осями поля ротора и результирующего поля в зазоре машины. Этот угол близок по своей величине к углу сдвига между  ЭДС
ЭДС  напряжением
, именуемому углом нагрузки синхронной машины. При опережении ротором результирующего вращающегося поля на ротор будет действовать тормозящий электромагнитный момент, тем больший, чем больше угол опережения (угол нагрузки
).
напряжением
, именуемому углом нагрузки синхронной машины. При опережении ротором результирующего вращающегося поля на ротор будет действовать тормозящий электромагнитный момент, тем больший, чем больше угол опережения (угол нагрузки
). в m-фазной обмотке статора. Этот ток создает свое собственное магнитное поле Ф„‚ именуемое полем реакции якоря. Поскольку явнополюсная синхронная машина имеет сильно различающуюся магнитную проводимость воздушного зазора под полюсным наконечником и в межполюсном пространстве, то поле реакции якоря принято рассматривать в системе двух взаимноперпендикулярных (в эл. градусах) осей d и q, где ось d проходит по оси полюса ротора, а ось q — по оси межполюсного пространства:
в m-фазной обмотке статора. Этот ток создает свое собственное магнитное поле Ф„‚ именуемое полем реакции якоря. Поскольку явнополюсная синхронная машина имеет сильно различающуюся магнитную проводимость воздушного зазора под полюсным наконечником и в межполюсном пространстве, то поле реакции якоря принято рассматривать в системе двух взаимноперпендикулярных (в эл. градусах) осей d и q, где ось d проходит по оси полюса ротора, а ось q — по оси межполюсного пространства:  . Так как оси d и q взаимноперпендикулярны, то потоки
. Так как оси d и q взаимноперпендикулярны, то потоки  не должны влиять друг на друга.
На рис.4.3 представлены три характерных случая реакции якоря в синхронном генераторе: поперечная при активной нагрузке, продольная размагничивающая при индуктивной нагрузке, продольная намагничивающая при емкостной нагрузке. В общем случае нагрузка синхронной машины носит смешанный характер и магнитный поток
не должны влиять друг на друга.
На рис.4.3 представлены три характерных случая реакции якоря в синхронном генераторе: поперечная при активной нагрузке, продольная размагничивающая при индуктивной нагрузке, продольная намагничивающая при емкостной нагрузке. В общем случае нагрузка синхронной машины носит смешанный характер и магнитный поток  ‚ НС
‚ НС  . ‚ ЭДС
. ‚ ЭДС  , ‚ ток
могут быть представлены в виде двух составляющих:
,
, ‚ ток
могут быть представлены в виде двух составляющих:
,  ,
,  ,
,  .
.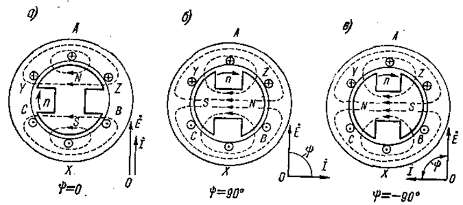

 , где
, где  - напряжение сети («+» - для генератора, « - » - для двигателя),
- напряжение сети («+» - для генератора, « - » - для двигателя),  -ЭДС ‚ наводимая в обмотке статора полем обмотки ротора;
-ЭДС ‚ наводимая в обмотке статора полем обмотки ротора;
 ,
, - продольная и поперечная составляющие ЭДС от поля реакции якоря;
- продольная и поперечная составляющие ЭДС от поля реакции якоря;  - ЭДС рассеяния от поля реакции якоря;
- ЭДС рассеяния от поля реакции якоря;  — падение напряжения на активном сопротивлении обмотки статора. Выразив ЭДС от поля реакции якоря через ток
— падение напряжения на активном сопротивлении обмотки статора. Выразив ЭДС от поля реакции якоря через ток  и соответствующие индуктивные сопротивления (
и соответствующие индуктивные сопротивления (  ,
,  )‚ получим выражение
)‚ получим выражение  .
Если ввести понятия синхронных индуктивных сопротивлений по продольной и поперечной осям (
.
Если ввести понятия синхронных индуктивных сопротивлений по продольной и поперечной осям (  ,
,  +
+ )‚ то уравнение напряжений примет вид
)‚ то уравнение напряжений примет вид
 0.0( 4.1 )
Пренебрегая теперь весьма малым падением напряжения на активном сопротивлении обмотки статора
0.0( 4.1 )
Пренебрегая теперь весьма малым падением напряжения на активном сопротивлении обмотки статора  ‚ можно построить упрощенную векторную диаграмму ЭДС (рис.4.4) синхронного генератора, работающего на активно-индуктивную нагрузку. Уравнение НС синхронной машины описывает взаимодействие полей обмотки статора и обмотки ротора
‚ можно построить упрощенную векторную диаграмму ЭДС (рис.4.4) синхронного генератора, работающего на активно-индуктивную нагрузку. Уравнение НС синхронной машины описывает взаимодействие полей обмотки статора и обмотки ротора 
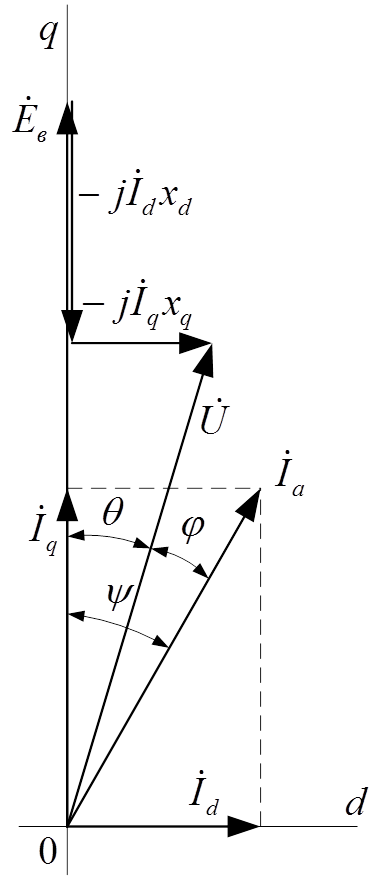
 ) при неизменном сопротивлении цепи возбуждения
) при неизменном сопротивлении цепи возбуждения  ) показывает, как будет изменяться напряжение на зажимах СГ при изменении тока нагрузки и нерегулируемой цепи возбуждения. При независимом возбуждении и при питании цепи возбуждения от возбудителя условие
соответствует условию
) показывает, как будет изменяться напряжение на зажимах СГ при изменении тока нагрузки и нерегулируемой цепи возбуждения. При независимом возбуждении и при питании цепи возбуждения от возбудителя условие
соответствует условию  . Вид внешних характеристик (рис.4.7.а) зависит от характера нагрузки. При активной нагрузке снижение напряжения с ростом тока якоря обусловлено падением напряжения на внутреннем сопротивлении обмотки (
. Вид внешних характеристик (рис.4.7.а) зависит от характера нагрузки. При активной нагрузке снижение напряжения с ростом тока якоря обусловлено падением напряжения на внутреннем сопротивлении обмотки ( и
и  ). Появление индуктивной или емкостной составляющей в токе якоря приводит к появлению размагничивающеи или намагничивающеи продольном реакции якоря и соответствующему изменению
. Номинальным изменением напряжения под нагрузкой называется величина:
). Появление индуктивной или емкостной составляющей в токе якоря приводит к появлению размагничивающеи или намагничивающеи продольном реакции якоря и соответствующему изменению
. Номинальным изменением напряжения под нагрузкой называется величина:
 х100%. В машинах нормального исполнения при
х100%. В машинах нормального исполнения при  =0‚8 оно составляет (15-25)%. Регулировочная характеристика (зависимость
=0‚8 оно составляет (15-25)%. Регулировочная характеристика (зависимость  ) при
) при  =const ) показывает, как нужно регулировать ток возбуждения СГ при изменении тока нагрузки, чтобы напряжение на зажимах оставалось неизменным. На рис.4.7.б представлены зависимости
=const ) показывает, как нужно регулировать ток возбуждения СГ при изменении тока нагрузки, чтобы напряжение на зажимах оставалось неизменным. На рис.4.7.б представлены зависимости  ) при различном характере нагрузки. Регулирование тока возбуждения определяется в данном случае видом внешних характеристик (см. рис.4.7.а). Вследствие насыщения магнитной цепи ток возбуждения при номинальной нагрузке
) при различном характере нагрузки. Регулирование тока возбуждения определяется в данном случае видом внешних характеристик (см. рис.4.7.а). Вследствие насыщения магнитной цепи ток возбуждения при номинальной нагрузке  может превышать ток возбуждения при холостом ходе
может превышать ток возбуждения при холостом ходе  в 2,0 — 2,5 раза. На практике поддержание постоянного напряжения на выходе СГ осуществляется с помощью автоматических систем регулирования тока возбуждения.
в 2,0 — 2,5 раза. На практике поддержание постоянного напряжения на выходе СГ осуществляется с помощью автоматических систем регулирования тока возбуждения.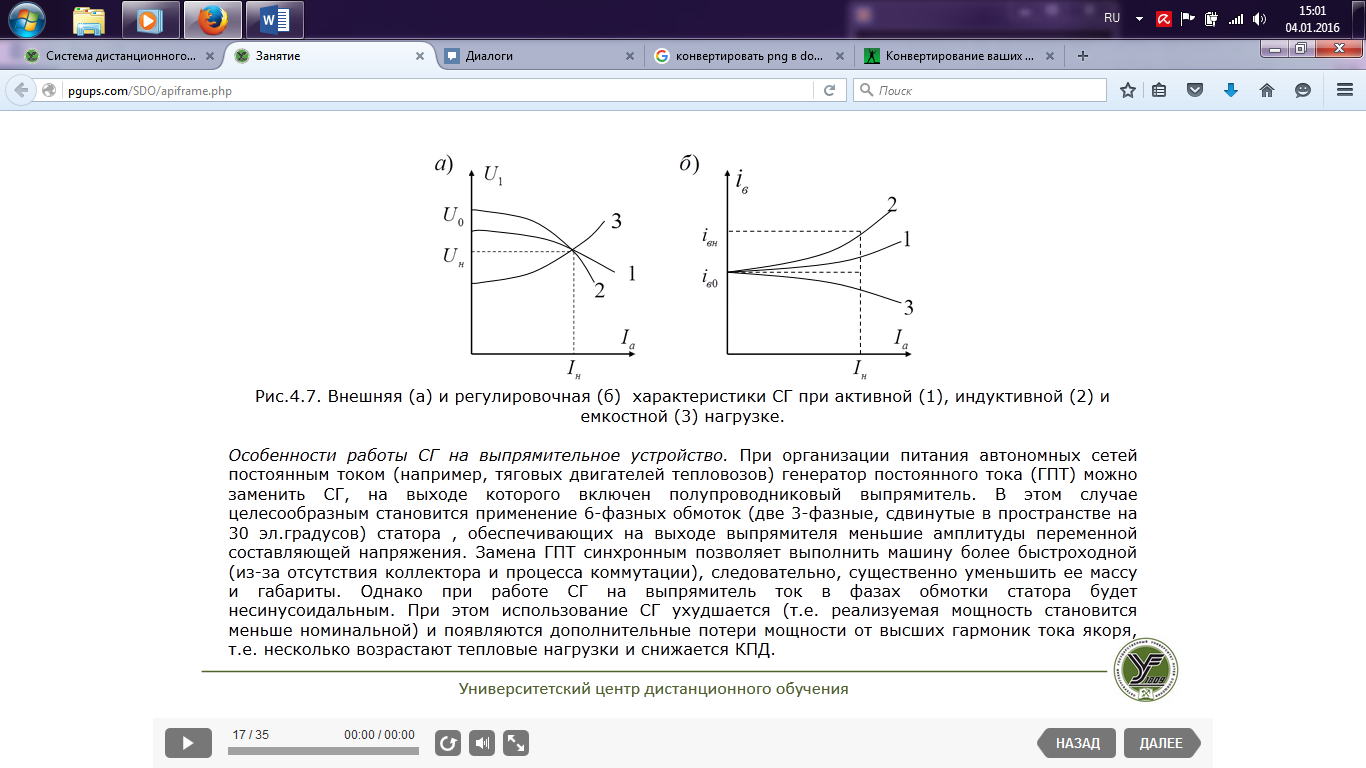
 ‚ характеризующему угол сдвига поля
ротора относительно результирующего
поля в зазоре. Из представленной на
рис.4.4. упрощенной векторной диаграммы
ЭДС можно составить следующие
соотношения:
‚ характеризующему угол сдвига поля
ротора относительно результирующего
поля в зазоре. Из представленной на
рис.4.4. упрощенной векторной диаграммы
ЭДС можно составить следующие
соотношения: ‚
‚


 в
двигательном и генераторном режимах
работы для основного, параметрического
и результирующего моментов. Учитывая
условие устойчивой работы
в
двигательном и генераторном режимах
работы для основного, параметрического
и результирующего моментов. Учитывая
условие устойчивой работы
 (аналогичное
условию
(аналогичное
условию
 в
асинхронных двигателях), можно
определить зону устойчивой работы
синхронной машины:
в
асинхронных двигателях), можно
определить зону устойчивой работы
синхронной машины:
 —
для неявнополюсных и
—
для неявнополюсных и
 —
для явнополюсных. Предел статической
перегружаемости неявнополюсной СМ:
—
для явнополюсных. Предел статической
перегружаемости неявнополюсной СМ:
 ‚
а коэффициент статической перегружаемости:
‚
а коэффициент статической перегружаемости:
 .
.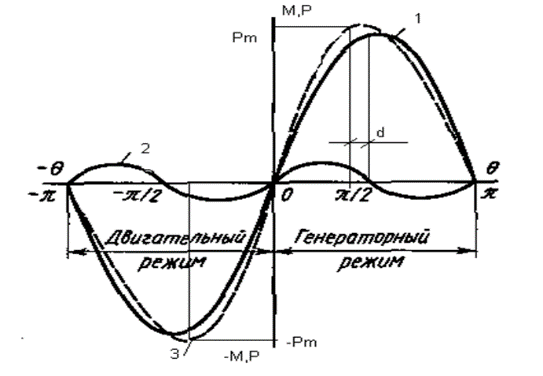
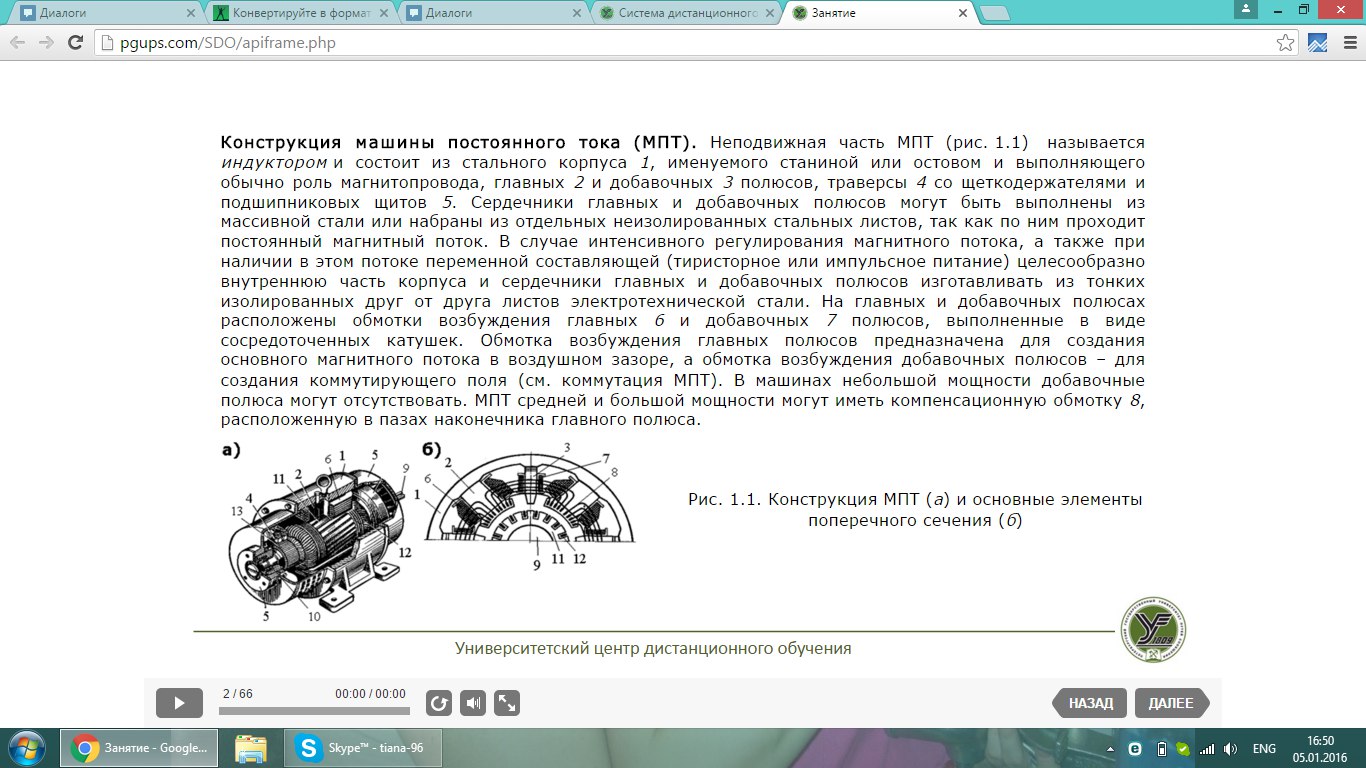 Рис. 1.1. Конструкция МПТ (а) и основные элементы
поперечного сечения (б)
Воздушный зазор под главным полюсом может быть равномерным или расходящимся (увеличивающимся от центра к краям), зазор под добавочным полюсом обычно несколько больше, чем под главным. Магнитная проводимость воздушного зазора под наконечником главного полюса намного выше, чем в межполюсном пространстве.
Помимо описанной выше явнополюсной конструкции индуктор МПТ может иметь и неявнополюсную конструкцию. В этом случае распределенная обмотка возбуждения укладывается в пазы, расположенные по внутренней окружности неподвижной части. При этом воздушный зазор и его магнитная проводимость по всем радиальным направлениям становятся постоянными.
Вращающаяся часть МПТ, именуемая якорем состоит из вала 9 и подшипников 10 сердечника якоря 11 с обмоткой 12 и коллектора 13 Сердечник якоря вращается в неподвижном постоянном магнитном поле главных полюсов и при вращении подвергается перемагничиванию, поэтому он изготавливается из тонких, изолированных друг от друга листов (для снижения потерь от вихревых токов)
электротехнической стали (для снижения потерь на гистерезис).
Обмотка якоря выполняется двухслойной (каждая катушка укладывается одной стороной в верхний слой паза, а другой стороной — в нижний слой другого паза), поэтому в лобовых частях (в местах перехода из паза в паз) катушки друг с другом не пересекаются. В зависимости от формы катушек (секций) различают петлевые, волновые и комбинированные обмотки (см. обмотки якоря).
Коллектор состоит из изолированных друг от друга коллекторных пластин, к каждой из которых подпаиваются по одному концу двух соседних секций. В результате между равномерно распределенными по окружности щетками образуются параллельные ветви, состоящие из последовательно соединенных секций. При вращении коллектора каждая из последовательно соединенных секций замыкается щеткой (в петлевых обмотках) или двумя однополярными щетками (в волновых обмотках) накоротко и переходит из одной параллельной ветви в другую (при этом ток в секции меняет свое направление на противоположное — такой процесс называется коммутацией). Если момент коммутации совместить в пространстве с моментом прохождения этой секции поперечной оси (оси добавочного полюса), именуемой в МПТ геометрической нейтралью, то под главным полюсом одной полярности окажутся пазы якоря с токами одного направления, а под главным полюсом другой полярности — пазы с токами другого направления.
Рис. 1.1. Конструкция МПТ (а) и основные элементы
поперечного сечения (б)
Воздушный зазор под главным полюсом может быть равномерным или расходящимся (увеличивающимся от центра к краям), зазор под добавочным полюсом обычно несколько больше, чем под главным. Магнитная проводимость воздушного зазора под наконечником главного полюса намного выше, чем в межполюсном пространстве.
Помимо описанной выше явнополюсной конструкции индуктор МПТ может иметь и неявнополюсную конструкцию. В этом случае распределенная обмотка возбуждения укладывается в пазы, расположенные по внутренней окружности неподвижной части. При этом воздушный зазор и его магнитная проводимость по всем радиальным направлениям становятся постоянными.
Вращающаяся часть МПТ, именуемая якорем состоит из вала 9 и подшипников 10 сердечника якоря 11 с обмоткой 12 и коллектора 13 Сердечник якоря вращается в неподвижном постоянном магнитном поле главных полюсов и при вращении подвергается перемагничиванию, поэтому он изготавливается из тонких, изолированных друг от друга листов (для снижения потерь от вихревых токов)
электротехнической стали (для снижения потерь на гистерезис).
Обмотка якоря выполняется двухслойной (каждая катушка укладывается одной стороной в верхний слой паза, а другой стороной — в нижний слой другого паза), поэтому в лобовых частях (в местах перехода из паза в паз) катушки друг с другом не пересекаются. В зависимости от формы катушек (секций) различают петлевые, волновые и комбинированные обмотки (см. обмотки якоря).
Коллектор состоит из изолированных друг от друга коллекторных пластин, к каждой из которых подпаиваются по одному концу двух соседних секций. В результате между равномерно распределенными по окружности щетками образуются параллельные ветви, состоящие из последовательно соединенных секций. При вращении коллектора каждая из последовательно соединенных секций замыкается щеткой (в петлевых обмотках) или двумя однополярными щетками (в волновых обмотках) накоротко и переходит из одной параллельной ветви в другую (при этом ток в секции меняет свое направление на противоположное — такой процесс называется коммутацией). Если момент коммутации совместить в пространстве с моментом прохождения этой секции поперечной оси (оси добавочного полюса), именуемой в МПТ геометрической нейтралью, то под главным полюсом одной полярности окажутся пазы якоря с токами одного направления, а под главным полюсом другой полярности — пазы с токами другого направления.
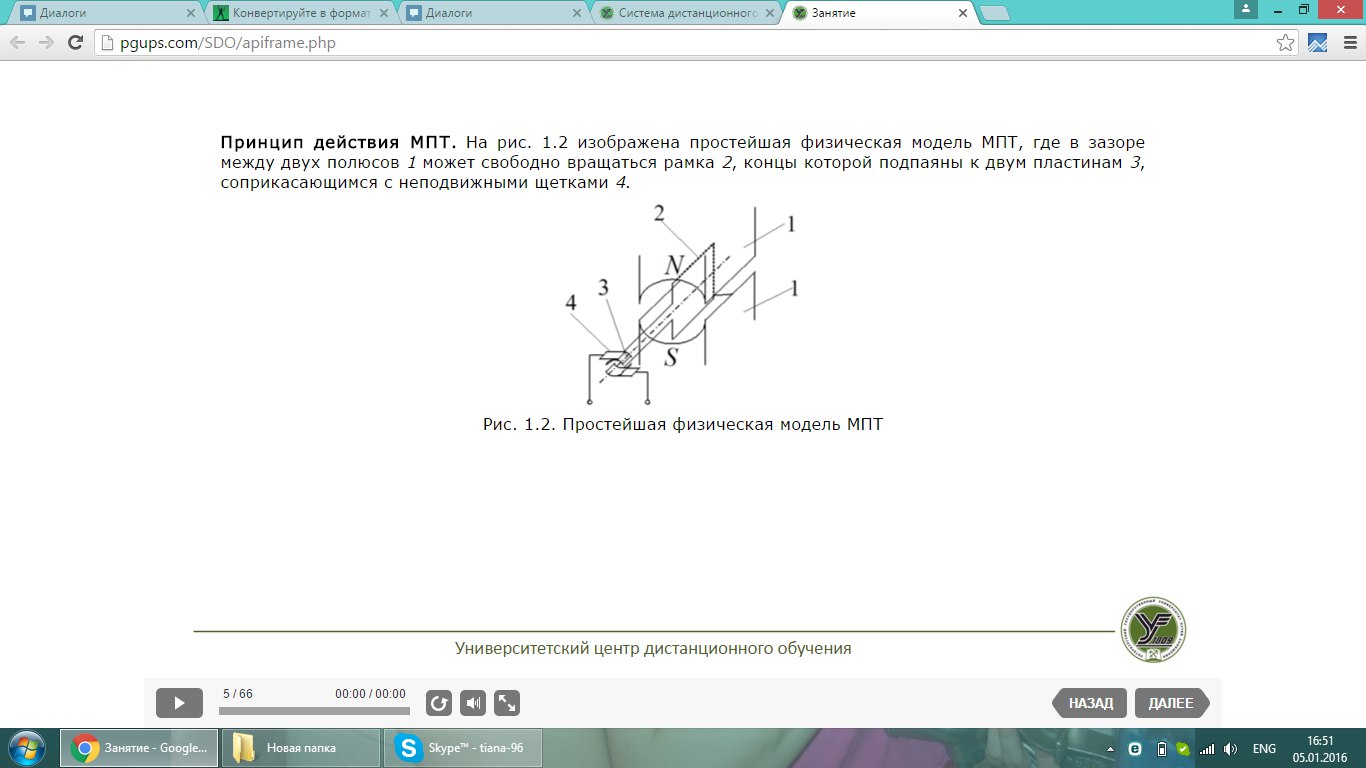 Рис. 1.2. Простейшая физическая модель МПТ
В режиме генератора рамка (рис. 1.3, а) приводится во вращение с частотой n внешним приводным
двигателем (ПД), при этом желательно поддерживать постоянной частоту вращения n = const ‚ так как от нее зависит величина выходного напряжения. При питании обмотки возбуждения главных полюсов постоянным током возбуждения
в воздушном зазоре под полюсным наконечником возникает неизменный во времени и неподвижный в пространстве магнитный поток
, который замыкается по сердечнику якоря, воздушному зазору, сердечнику главных полюсов и ярму (корпусу МПТ). Направление
при электромагнитном возбуждении определяется по «правилу буравчика».
Рис. 1.2. Простейшая физическая модель МПТ
В режиме генератора рамка (рис. 1.3, а) приводится во вращение с частотой n внешним приводным
двигателем (ПД), при этом желательно поддерживать постоянной частоту вращения n = const ‚ так как от нее зависит величина выходного напряжения. При питании обмотки возбуждения главных полюсов постоянным током возбуждения
в воздушном зазоре под полюсным наконечником возникает неизменный во времени и неподвижный в пространстве магнитный поток
, который замыкается по сердечнику якоря, воздушному зазору, сердечнику главных полюсов и ярму (корпусу МПТ). Направление
при электромагнитном возбуждении определяется по «правилу буравчика».
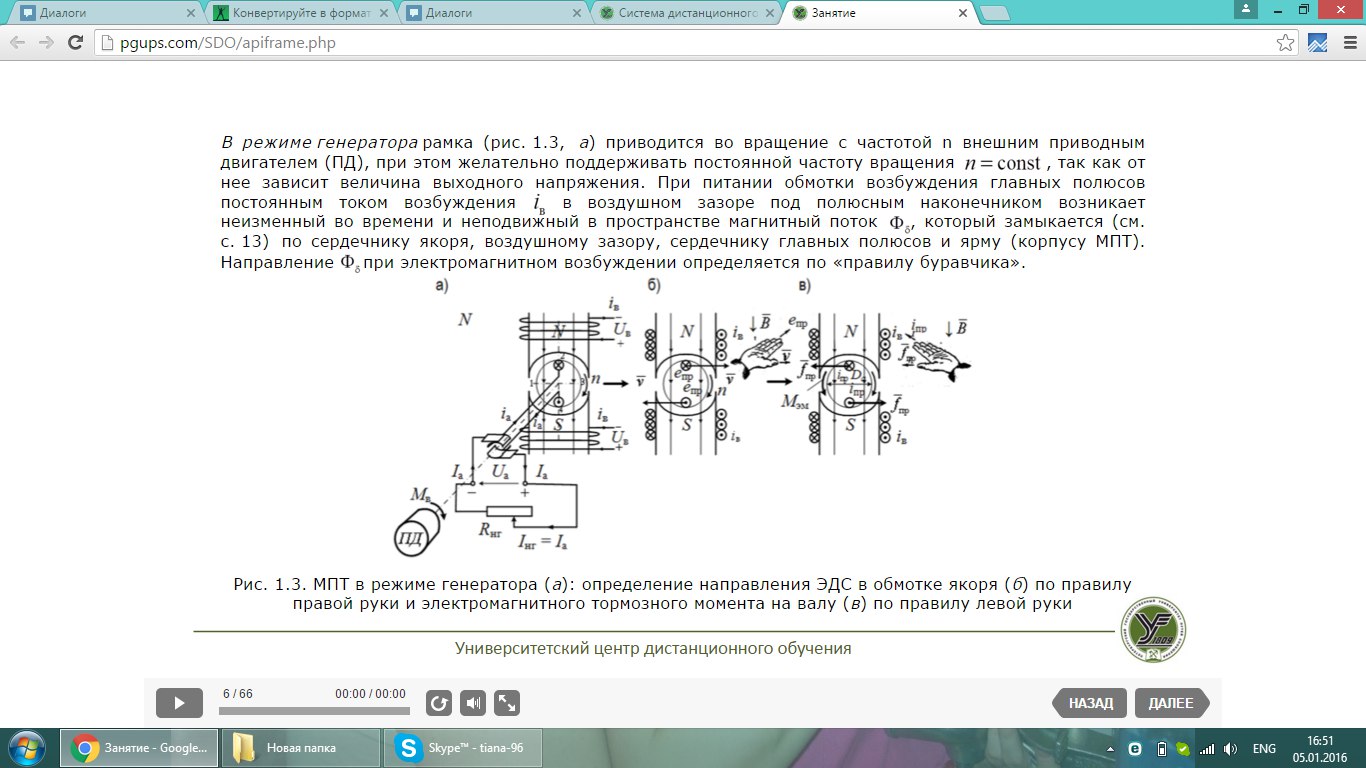 Рис. 1.3. МПТ в режиме генератора (а): определение направления ЭДС в обмотке якоря (б) по правилу правой руки и электромагнитного тормозного момента на валу (в) по правилу левой руки
При вращении рамки обе ее стороны являются проводниками, движущимися в магнитном поле
,
поэтому в них будет индуктироваться ЭДС. При прохождении проводниками точек 1 и 3 (рис. 1.3, а) ЭДС будет равна нулю, так как проводник в этом случае движется параллельно линиям магнитного поля. При прохождении проводниками точек 2 и 4 ЭДС будет максимальна, так как проводники будут двигаться перпендикулярно линиям поля. Величина этой ЭДС будет равна
Рис. 1.3. МПТ в режиме генератора (а): определение направления ЭДС в обмотке якоря (б) по правилу правой руки и электромагнитного тормозного момента на валу (в) по правилу левой руки
При вращении рамки обе ее стороны являются проводниками, движущимися в магнитном поле
,
поэтому в них будет индуктироваться ЭДС. При прохождении проводниками точек 1 и 3 (рис. 1.3, а) ЭДС будет равна нулю, так как проводник в этом случае движется параллельно линиям магнитного поля. При прохождении проводниками точек 2 и 4 ЭДС будет максимальна, так как проводники будут двигаться перпендикулярно линиям поля. Величина этой ЭДС будет равна  ,(где -
,(где -  индукция магнитного поля в воздушном зазоре,
индукция магнитного поля в воздушном зазоре,  — длина проводника в зоне магнитного поля,
— длина проводника в зоне магнитного поля,
 — окружная скорость якоря), а направление определяется по «правилу правой руки» (рис. 1.3, б). Под полюсами разной полярности направление ЭДС будет различным, поэтому суммарная ЭДС рамки
— окружная скорость якоря), а направление определяется по «правилу правой руки» (рис. 1.3, б). Под полюсами разной полярности направление ЭДС будет различным, поэтому суммарная ЭДС рамки  ‚ а график ее изменения во времени представлен на рис. 1.4, а. Частота изменения
‚ а график ее изменения во времени представлен на рис. 1.4, а. Частота изменения  определяется частотой вращения n и числом пар полюсов р, расположенных по окружности якоря: f=pn. При прохождении точек 1 и 3 (рис. 1.3, а) одновременно с изменением направления ЭДС в проводниках рамки происходит переход вращающихся пластин, к которым подпаяны концы рамки, к неподвижным щеткам другой полярности, поэтому ЭДС
определяется частотой вращения n и числом пар полюсов р, расположенных по окружности якоря: f=pn. При прохождении точек 1 и 3 (рис. 1.3, а) одновременно с изменением направления ЭДС в проводниках рамки происходит переход вращающихся пластин, к которым подпаяны концы рамки, к неподвижным щеткам другой полярности, поэтому ЭДС  на зажимах якорной цепи после щеток будет изменяться согласно рис. 1.4, б. Таким образом, коллектор в генераторе постоянного тока ( ГПТ)выполняет роль механического выпрямителя.
на зажимах якорной цепи после щеток будет изменяться согласно рис. 1.4, б. Таким образом, коллектор в генераторе постоянного тока ( ГПТ)выполняет роль механического выпрямителя.
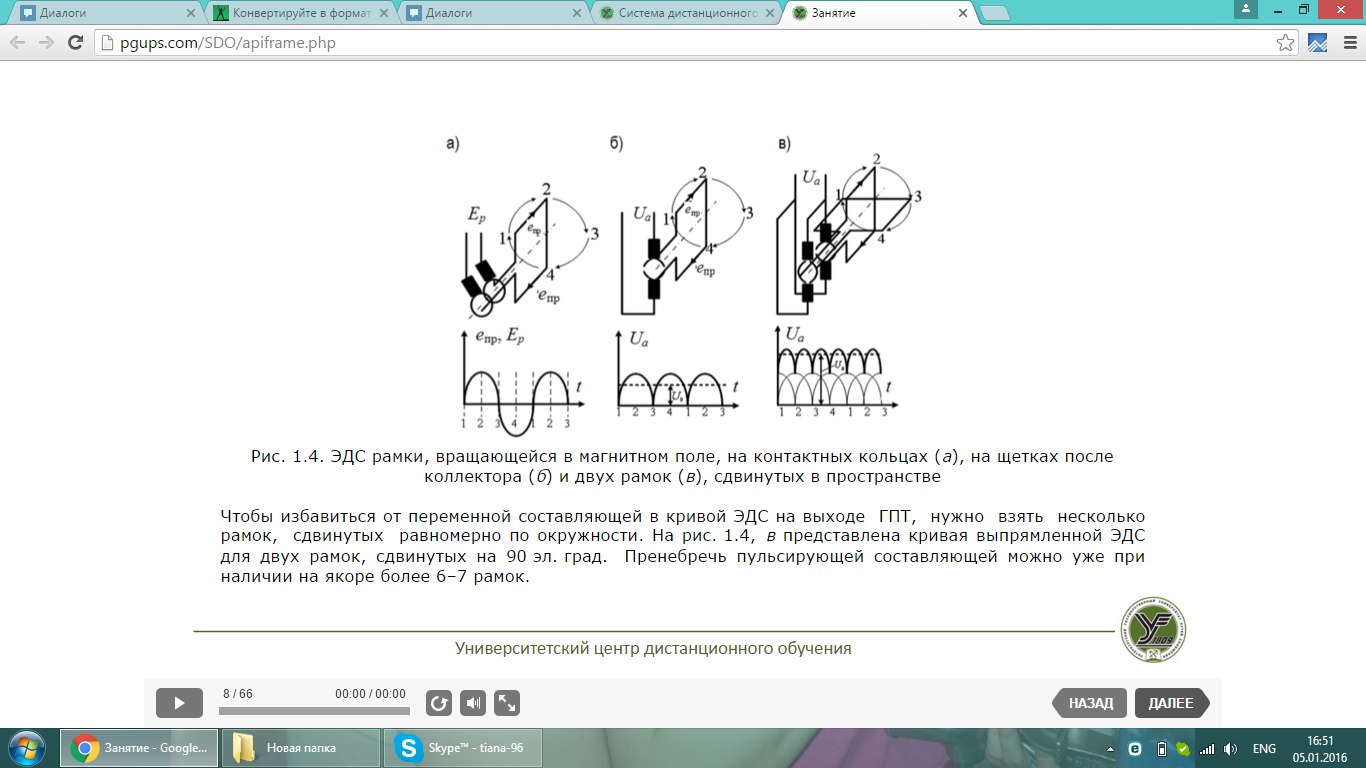 1.4. ЭДС рамки, вращающейся в магнитном поле, на контактных кольцах (а), на щетках после коллектора (б) и двух рамок (в), сдвинутых в пространстве
Чтобы избавиться от переменной составляющей в кривой ЭДС на выходе ГПТ, нужно взять несколько рамок, сдвинутых равномерно по окружности. на рис 1.4. в представлена кривая выпрямленной ЭДС для двух рамок, сдвинутых на 90 эл. град. Пренебречь пульсирующей составляющей можно уже при наличии на якоре более 6-7 рамок.
Если к щеткам (рис. 1.3, а) подключить нагрузочное сопротивление
1.4. ЭДС рамки, вращающейся в магнитном поле, на контактных кольцах (а), на щетках после коллектора (б) и двух рамок (в), сдвинутых в пространстве
Чтобы избавиться от переменной составляющей в кривой ЭДС на выходе ГПТ, нужно взять несколько рамок, сдвинутых равномерно по окружности. на рис 1.4. в представлена кривая выпрямленной ЭДС для двух рамок, сдвинутых на 90 эл. град. Пренебречь пульсирующей составляющей можно уже при наличии на якоре более 6-7 рамок.
Если к щеткам (рис. 1.3, а) подключить нагрузочное сопротивление  ‚ то под действием ЭДС
по замкнутому контуру «обмотка якоря –
» будет протекать ток нагрузки
. Напряжение ГПТ в этом случае будет
‚ то под действием ЭДС
по замкнутому контуру «обмотка якоря –
» будет протекать ток нагрузки
. Напряжение ГПТ в этом случае будет , гдe
, — внутреннее сопротивление якорной цепи. Направление тока в генераторе будет совпадать с направлением ЭДС (см. рис. 1.3, а, б) и на проводник с током, находящимся в магнитном поле, будет действовать сила
, гдe
, — внутреннее сопротивление якорной цепи. Направление тока в генераторе будет совпадать с направлением ЭДС (см. рис. 1.3, а, б) и на проводник с током, находящимся в магнитном поле, будет действовать сила  ‚ направление которой определяется по «правилу левой руки» (рис. 1.3, в). Две стороны рамки образуют пару сил, создающих в ГПТ тормозной электромагнитный момент
‚ направление которой определяется по «правилу левой руки» (рис. 1.3, в). Две стороны рамки образуют пару сил, создающих в ГПТ тормозной электромагнитный момент
 ‚
Где
‚
Где  — диаметр якоря. Таким образом, приводной двигатель ПД при работе МПТ в режиме генератора будет преодолевать момент холостого хода МО, обусловленный потерями мощности в режиме холостого хода (трение в подшипниках, скользящих контактах и т. п.)‚ и тормозной электромагнитный момент
— диаметр якоря. Таким образом, приводной двигатель ПД при работе МПТ в режиме генератора будет преодолевать момент холостого хода МО, обусловленный потерями мощности в режиме холостого хода (трение в подшипниках, скользящих контактах и т. п.)‚ и тормозной электромагнитный момент  , обусловленный током нагрузки якоря:
, обусловленный током нагрузки якоря:
 где
где  - момент на валу от приводного двигателя. Схемы входной механической и выходной электрической цепей ГПТ показаны на рис. 1.5.
Электромагнитную мощность
- момент на валу от приводного двигателя. Схемы входной механической и выходной электрической цепей ГПТ показаны на рис. 1.5.
Электромагнитную мощность  , как результат преобразования механической мощности в электрическую, будет определяться как:
, как результат преобразования механической мощности в электрическую, будет определяться как:
 ,
Где
,
Где  . Умножив в уравнении напряжения ГПТ правую и левую часть на
, поучим:
. Умножив в уравнении напряжения ГПТ правую и левую часть на
, поучим:
 ,
т.е. мощность, вырабатываемая ГПТ, равна электромагнитной за вычетом электрических потерь в якорной цепи.
,
т.е. мощность, вырабатываемая ГПТ, равна электромагнитной за вычетом электрических потерь в якорной цепи.
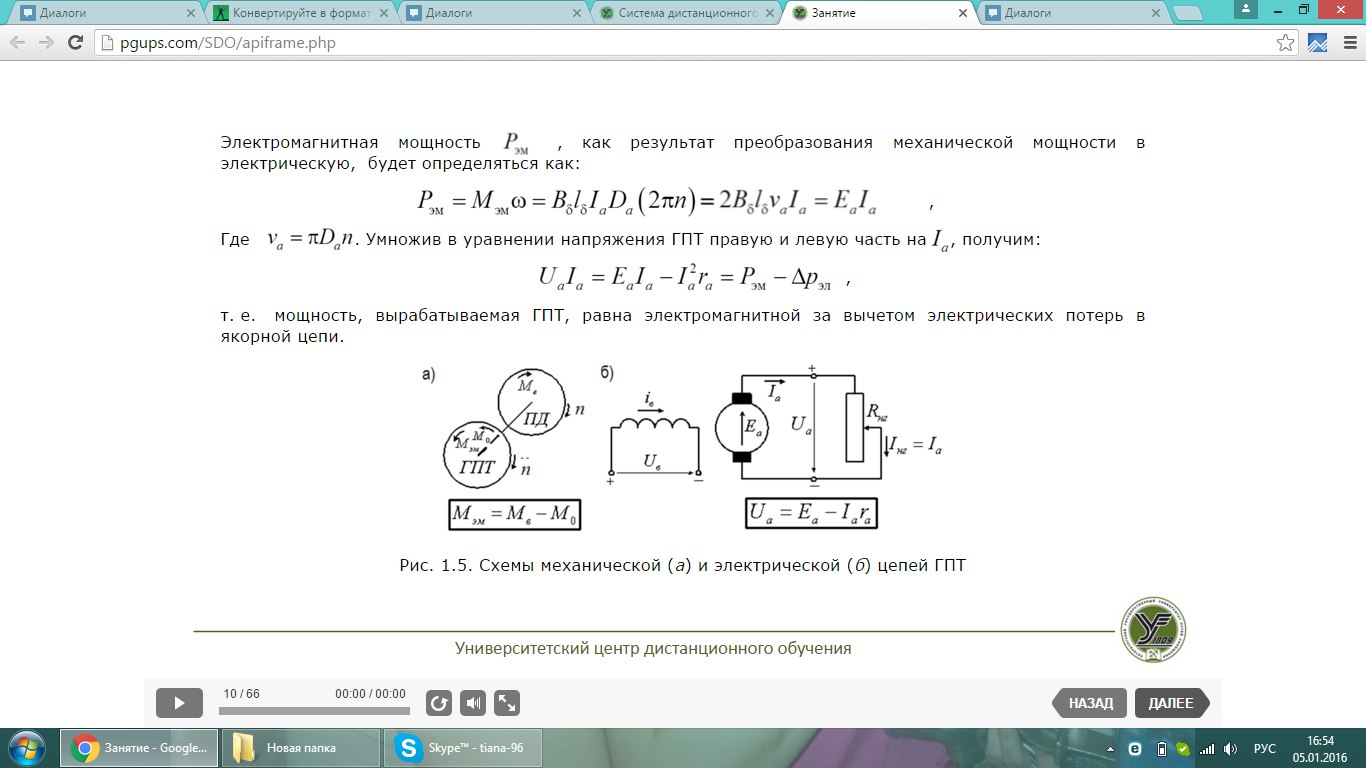 В режиме двигателя на щетки подается сетевое постоянное напряжение
В режиме двигателя на щетки подается сетевое постоянное напряжение  (рис. 1.6, а), под действием которого по рамке протекает ток от «+» сетевого напряжения по якорной цепи к «-» сетевого напряжения. Взаимодействуя с созданным током возбуждения магнитным потоком
‚ ток в проводниках рамки создает крутящий электромагнитный момент
(рис. 1.6, а), под действием которого по рамке протекает ток от «+» сетевого напряжения по якорной цепи к «-» сетевого напряжения. Взаимодействуя с созданным током возбуждения магнитным потоком
‚ ток в проводниках рамки создает крутящий электромагнитный момент  (рис. 1.6, б), и рамка приходит во вращение с частотой Если на ось вращения рамки установить приводной механизм (ПМ), то вращающаяся рамка приведет его во вращение, при этом чем больший электромагнитный момент будет требоваться для вращения ПМ, тем больший ток должен протекать по рамке. При вращении рамки на рис. 1.6, а коллекторные пластины через каждые пол-оборота переходят под щетки другой полярности и по рамке протекает переменный ток, изменяющийся с частотой
(рис. 1.6, б), и рамка приходит во вращение с частотой Если на ось вращения рамки установить приводной механизм (ПМ), то вращающаяся рамка приведет его во вращение, при этом чем больший электромагнитный момент будет требоваться для вращения ПМ, тем больший ток должен протекать по рамке. При вращении рамки на рис. 1.6, а коллекторные пластины через каждые пол-оборота переходят под щетки другой полярности и по рамке протекает переменный ток, изменяющийся с частотой  . Поэтому в двигателе постоянного тока (ДПТ) коллектор выполняет роль механического инвертора. Благодаря такой работе коллектора под полюсом одной полярности все время находятся токи одного направления и создается неизменный во времени вращающий электромагнитный момент
, который преодолевает момент на валу
, (момент сопротивления ПМ) и момент холостого хода ДПТ
. Поэтому в двигателе постоянного тока (ДПТ) коллектор выполняет роль механического инвертора. Благодаря такой работе коллектора под полюсом одной полярности все время находятся токи одного направления и создается неизменный во времени вращающий электромагнитный момент
, который преодолевает момент на валу
, (момент сопротивления ПМ) и момент холостого хода ДПТ :
:  .
В проводниках вращающейся рамки возникают ЭДС (рис. 1.6, в)
, складывающиеся в суммарную ЭДС рамки
.
В проводниках вращающейся рамки возникают ЭДС (рис. 1.6, в)
, складывающиеся в суммарную ЭДС рамки  и действующие встречно току
. Напряжение сети, приложенное к обмотке якоря, расходуется на преодоление ЭДС
и падение напряжения
и действующие встречно току
. Напряжение сети, приложенное к обмотке якоря, расходуется на преодоление ЭДС
и падение напряжения
 . Если умножить правую и левую часть на
, получим:
. Если умножить правую и левую часть на
, получим:  ,т. е. потребляемая ДПТ мощность из сети
расходуется на создание электромагнитной мощности
,т. е. потребляемая ДПТ мощность из сети
расходуется на создание электромагнитной мощности  и электрические потери в обмотке якоря
и электрические потери в обмотке якоря  . Электромагнитная мощность как продукт преобразования электрической мощности в механическую:
. Электромагнитная мощность как продукт преобразования электрической мощности в механическую:  .
.
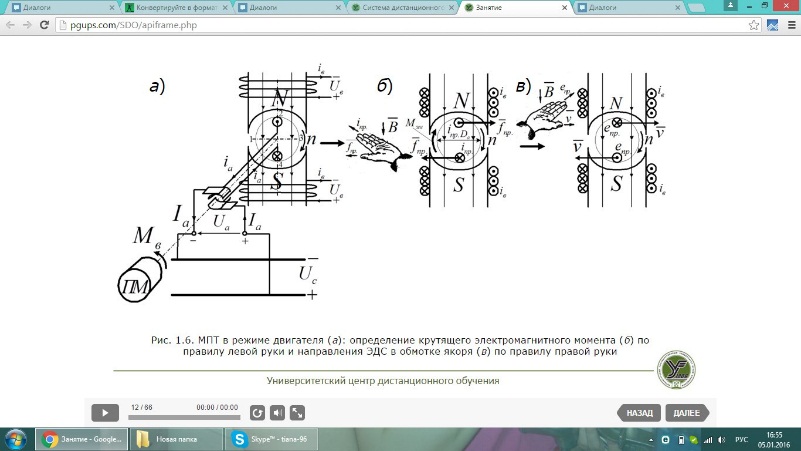 При сопоставлении полученных соотношений для электрической и механической цепе МПТ в режимах прямого и обратного преобразования энергии видно, что в режиме генератора
При сопоставлении полученных соотношений для электрической и механической цепе МПТ в режимах прямого и обратного преобразования энергии видно, что в режиме генератора  и
и  , а в режиме двигателя
, а в режиме двигателя  и
и  . Регулируя величину
по отношению к
. Регулируя величину
по отношению к  и величину
и величину  по отношению к
, можно совершать плавный переход из двигательного в генераторный режим работы и обратно. При этом ток якоря
и электромагнитный момент
будут менять свое направление (рис.1.3 и 1.6)
по отношению к
, можно совершать плавный переход из двигательного в генераторный режим работы и обратно. При этом ток якоря
и электромагнитный момент
будут менять свое направление (рис.1.3 и 1.6)