

1.3 Краткая характеристика механизмов машины замера параметров плавки
1.3.1 Механизм перемещения измерительной фурмы
Измерительная трубка установлена на каретке, оборудованной двумя парами роликов, и перемещается вдоль направляющей, установленной в опорных кронштейнах поворотной колонны.
Каретка подвешена на тросе на барабане, который приводится в движение электродвигателем постоянного тока D814 через дифференциальную передачу с передаточным числом il = 4,3. Через ту же коробку передач, но с передаточным отношением i2 = 93, барабан может приводиться в движение с помощью двигателя переменного тока 4MTKN 160M8, который предназначен для извлечения сопла из преобразователя в случае отказа основного привода.
Конкретное положение форсунки фиксируется с помощью тормозов TKG-500 и TKG-300 для основного или аварийного привода. Помимо функции фиксации механизма в остановленном положении, тормоза служат для исключения возможности передачи вращения одного двигателя другому, когда барабан заблокирован.
Для управления тяговым приводом и блокировки другими механизмами предусмотрен путевой выключатель VPF 11-01-182151-54.
Передаточное число встроенного редуктора переключателя i = 15 обеспечивает вращение вала переключения на 0,88 оборота при полном копье сопла.
Аварийное ограничение движения копья осуществляется с помощью трехпозиционных переключателей VP16E23A231-55U3.2 SQ41, SQ42 и SQ47. SQ41 спроектирован таким образом, что главный двигатель в крайнем верхнем положении автомобиля с соплом выключен. SQ 42 - для реверса основного двигателя в нижнем положении форсунки. SQ 47- был разработан для деактивации аварийного двигателя в крайнем верхнем положении автомобиля с фурмой.
При поломке и свободном падении автомобиля это обеспечивается защитным устройством. В то же время, как и при любом ослаблении каната, соединенного с подвеской ползуна с помощью насадки во время опускания, датчик натяжения каната SQ 48 работает на концевом выключателе типа VP16E23A231-55U3.2.
Чтобы обеспечить требуемый диапазон и точность для поддержания этой скорости фурмы, тахогенератор постоянного тока TP212 установлен на заднем конце вала двигателя. Возбуждение тахогенератора постоянными магнитами. Кинематическая схема механизма подъёма измерительной фурмы представлена на рисунке 1.3.
Барабан 600мм
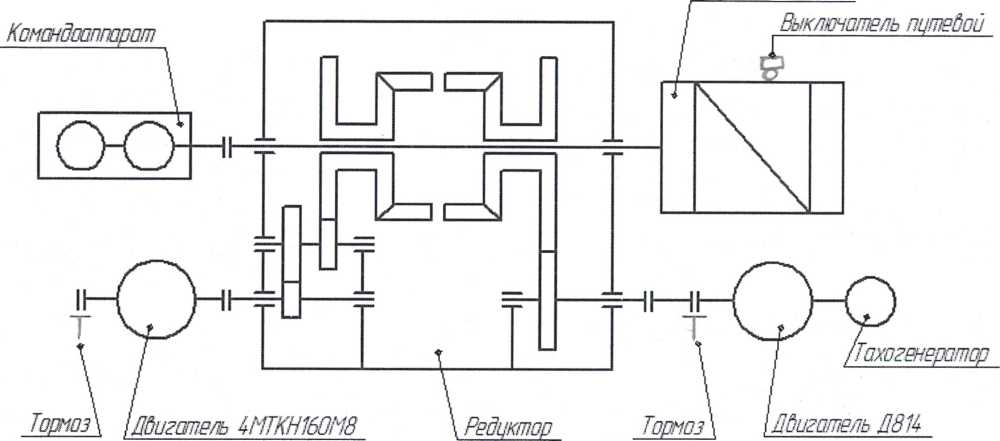
Рисунок 1.3 - Кинематическая схема механизма подъёма измерительной фурмы
1.3.2 Насосная станция гидросистемы
Насосная станция предназначена для снабжения гидроцилиндров исполнительных механизмов рабочей жидкостью.
Приводы рабочего и резервного насосов BG12-28M состоят из асинхронных двигателей с короткозамкнутым ротором 4A100 SA4. Насос работает непрерывно на протяжении всего процесса плавления. Непрерывная прокачка масла через гидравлическую систему снабжает охлаждающие цилиндры. В промежутке насос выключается. Технические данные двигателя приведены в таблице 1.
Таблица 1 - Технические данные двигателя 4А100 SA4
-
Количество на механизм
шт
2
Напряжение
В
380
Мощность
кВт
3
Ток
А
6,7
Скорость вращения номинальная
Об/мин
1435
Режим работы
%ПВ
100