

Лаб. работа №4
.docxНелдер и Мид усовершенствовали метод регулярного симплекса, сохранив его достоинства, и предложили методику ускорения поиска в удачно выбранном направлении. В методе деформированного многогранника (метод Нелдера Мида) также строят исходный регулярный симплекс, определяют значения целевой функции в вершинах симплекса.
При работе с алгоритмом метода деформируемого многогранника используются следующие соглашения:
первый индекс координаты входного параметра определяет порядковый номер вершины симплекса. Количество вершин симплекса равно n+1;
второй индекс координаты входного параметра обозначает порядковый номер оси координат (координата направления). Для целевой функции двух переменных максимальное значение второго индекса j=2.
В двухмерный массив координат вершин симплекса (n+1 вершина) добавлены координаты:
n + 2 – центра тяжести;
n + З – отображенной вершины;
n + 4 – растянутой вершины;
n + 5 – сжатой вершины.
Для удобства обозначений в выражениях используются индексы: h – номер вершины симплекса, которой принадлежит максимальное значение целевой функции

l – номер вершины симплекса, которой принадлежит минимальное значение целевой функции

k – номер шага (итерации) алгоритма.
Для определения координат центра тяжести симплекса используют выражение:

Исходный симплекс регулярный, следовательно, в начало координат можно поместить либо одну из вершин симплекса, либо центр тяжести. Из аналитической геометрии известно, что координаты вершин правильной (регулярной) фигуры можно задать с помощью матрицы

Количество столбцов матрицы D соответствует количеству вершин симплекса (n+1), а строки матрицы D содержат координаты вершин симплекса. Количество строк равно n.
Значения элементов матрицы D вычисляют по формулам:

где t— расстояние между вершинами симплекса. Для большинства задач t=1.
Над отображаемой вершиной в методе деформируемого многогранника могут быть выполнены следующие процедуры.
1. Отображение вершины.
2. В случае поиска минимума целевой функции через центр тяжести отображается вершина h с наибольшим значением целевой функции.
В случае поиска максимума целевой функции – вершина l. Отображение вершины симплекса выполняется с использованием выражения:

где α > 0 коэффициент отображения
Если значение целевой функции в
отображенной вершине (n+3)
меньше, чем в вершине
 ,
и больше, чем в вершине
,
и больше, чем в вершине
 ,
то координаты вершины
заменяют на координаты отображенной
вершины.
,
то координаты вершины
заменяют на координаты отображенной
вершины.
3. Растяжение вершины.
4. Если после отображения вершины симплекса оказалось, что значение целевой функции в отображаемой вершине меньше, чем во всех остальных вершинах или равно значению целевой функции в вершине , то выбранное направление удачное, т.е. где-то в этом направлении находится экстремум. Поэтому отображаемую вершину надо продвинуть в направлении отображения.

где γ > 0 коэффициент отображения
5. Если значение целевой функции в растянутой вершине меньше, чем значение целевой функции в отображенной вершине, то координаты вершины заменяются на координаты растянутой вершины. В противном случае координаты вершины заменяются на координаты растянутой вершины.
6. Сжатие вершины. Если после отображения вершины симплекса оказалось, что значение целевой функции в отображенной вершине больше или равно значению целевой функции в вершине , то направление отображения выбрано неудачно и отображенную вершину надо приблизить к центру тяжести. Сжатие вершины выполняется по формуле:

где 0 < β < 1 коэффициент отображения
Если после выполнения процедуры сжатия значение целевой функции в сжатой вершине будет меньше, чем в вершине , то выполняем замену координат вершины , на координаты сжатой вершины. В противном случае выполняется процедура редукции вершин симплекса.
По формуле (1) симплекс сжимается к вершине . Можно преобразовать формулу (1) и симплекс будет сжиматься к центру тяжести.
4. Редукция вершин. Если в результате выполнения процедур отображения и сжатия оказалось, что выполнить замену координат вершины , нельзя, то выполняется процедура редукции вершин симплекса, в результате чего геометрические размеры симплекса уменьшаются, как правило, в 2 раза. Редукция вершин симплекса выполняется по формуле:

Процедура редукции выполняется в том случае, когда нет возможности отобразить вершину , т.е. симплекс находится в окрестности экстремума и надо уточнить координаты экстремальной точки.
Для всех процедур — отображение, растяжение, сжатие, редукция и определение координат центра тяжести – вычисления по указанным формулам надо выполнить для каждого индекса (для каждого координатного направления). При выполнении процедур растяжения и сжатия исходный регулярный симплекс изменяет свои геометрические размеры и теряет свойство регулярности.
5. Критерий окончания поиска.
Критериев окончания поиска можно указать несколько. Наилучшего критерия окончания поиска нет. Авторы метода деформируемого многогранника рекомендуют в качестве критерия окончания поиска использовать выражение:

где ε – произвольное малое число, которое определяет точность вычисления значения целевой функции.
Используемый деформируемый многогранник (симплекс) наиболее удачно приспособлен к топографии целевой функции, т. е. изменяет свою форму в зависимости от «рельефа» целевой функции.
Авторы метода деформируемого многогранника провели ряд исследований и рекомендуют следующие значения коэффициентов: α=1; β=0,5 и γ=2. Другие исследователи этого метода рекомендуют α=1; 0,4 ≤ β ≤ 0,6 и 2,8 ≤ γ ≤ 3,0. Предложенные рекомендации хорошо себя показали на многих целевых функциях, хотя при исследовании специальных целевых функций значения коэффициентов могут быть другими.
Необходимо найти оптимальные значения
переменных
 для целевой функции
для целевой функции
 в окрестностях точек
в окрестностях точек
 методом деформируемого многогранника.
методом деформируемого многогранника.
Целевая функция имеет несколько локальных
минимумов (рис. 1 и рис. 2). 
Рис. 1. График целевой функции
Р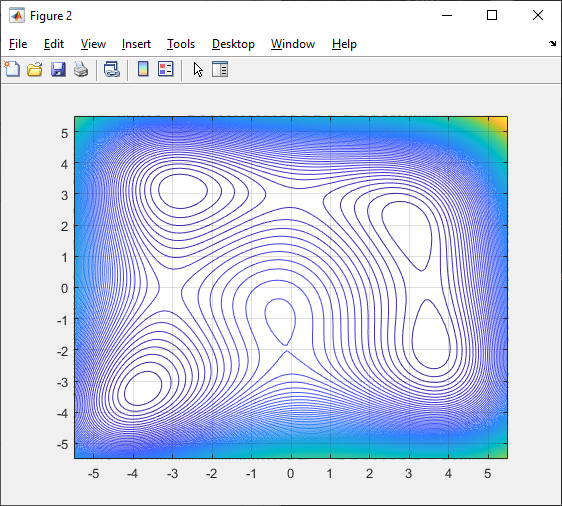 ис.
2. Линии уровня целевой функции
ис.
2. Линии уровня целевой функции
Пошаговое выполнение примера позволяет проследить перемещение частных решений, полученных на каждой итерации, к локальному экстремуму.
П ри
поиске минимума целевой функции двух
переменных в качестве симплекса
используется равносторонний треугольник
(рис. 3).
ри
поиске минимума целевой функции двух
переменных в качестве симплекса
используется равносторонний треугольник
(рис. 3).
Рис.3. Исходный сиплекс
От заданной длины ребра симплекса b
(т.е. длины стороны треугольника) зависит
скорость поиска оптимального решения.
Первоначально векторы решений X
задают в вершинах симплекса, где
вычисляют значения целевой функции
F(X).
Одна из вершин исходного симплекса
находится в начальной точке
 .
Координаты двух других вершин исходного
симплекса определяются по следующим
формулам.
.
Координаты двух других вершин исходного
симплекса определяются по следующим
формулам.

Далее определяют, в какой вершине
симплекса или
или
 целевая функция F(X)
имеет максимальное (наихудшее) значение.
Затем определяют центр тяжести симплекса
(в данном случае центр равностороннего
треугольника) и отражают вершину с
максимальным значением целевой функции
через центр тяжести.
целевая функция F(X)
имеет максимальное (наихудшее) значение.
Затем определяют центр тяжести симплекса
(в данном случае центр равностороннего
треугольника) и отражают вершину с
максимальным значением целевой функции
через центр тяжести.
С троят
новый регулярный симплекс (рис. 4),
вершинами которого будут две вершины
предыдущего симплекса и отраженная
вершина
троят
новый регулярный симплекс (рис. 4),
вершинами которого будут две вершины
предыдущего симплекса и отраженная
вершина

Рис. 4. Новый регулярный симплекс
Критерий остановки алгоритма определяется по формуле:

Таблица 1.
Результаты выполнения программы
|
|
|
|
(5; 5) |
3,8769 |
-2,1035 |
5.4072 |




ИСХОДНЫЙ КОД ПРОГРАММЫ
clc;
close all
% График ЦФ
xi1 = -5.5:0.1:5.5;
xi2 = -5.5:0.1:5.5;
[X1, X2] = meshgrid(xi1,xi2);
Fun = (X1.^2 + X2 - 11).^2 + (X1 + X2.^2 - 7).^2;
figure
meshc(X1, X2, Fun); grid on
figure
contour(X1, X2, Fun, 120); grid on
% линии уровня вблизи x1 = [5; 5]
xi1 = 3.5:0.02:5.5;
xi2 = 3.5:0.02:5.5;
[X1, X2] = meshgrid(xi1,xi2);
Fun = (X1.^2 + X2 - 11).^2 + (X1 + X2.^2 - 7).^2;
figure
contour(X1, X2, Fun, 50); hold on;
axis equal
% встроенная ЦФ
F = inline('(x(1).^2 + x(2) - 11).^2 + (x(1) + x(2).^2 -7).^2');
n = 2; % размерность задачи
b = 0.2; % длина ребра симплекса
alpha = 1; % коэффициент отображения
gamma = 2; % коэффициент растяжения
beta = 0.5; % коэффициент сжатия
MaxNumIter = 100; % максимальное количество итераций
x1 = [5; 5]; % стартовая точка
TolFun = 0.0001;
% строим исходный регулярный симплекс
x2 = zeros(2,1); % координаты второй точки симплекса
x2(1)=x1(1)+(sqrt(n+1)-1)/(n*sqrt(2))*b;
x2(2)=x1(2)+(sqrt(n+1)+n-1)/(n*sqrt(2))*b;
x3 = zeros(2,1); % координаты третьей точки симплекса
x3(1)=x1(1)+(sqrt(n+1)+n-1)/(n*sqrt(2))*b;
x3(2)=x1(2)+(sqrt(n+1)-1)/(n*sqrt(2))*b;
x = zeros(2,3);
% записываем в массив 2*3 координаты симплекса
x(:,1) = x1;
x(:,2) = x2;
x(:,3) = x3;
for i=1:MaxNumIter % цикл по номеру
sprintf('Симплекс № %d', i)
patch([x1(1) x2(1) x3(1)], [x1(2) x2(2) x3(2)], [1 1 1], 'FaceColor', 'none')
F1 = F(x1);
F2 = F(x2);
F3 = F(x3);
sprintf('ЦФ в точке х1 %f', F1)
sprintf('ЦФ в точке х2 %f', F2)
sprintf('ЦФ в точке х3 %f', F3)
% самая высокая точка F
Fmax = max([F1 F2 F3]);
switch Fmax
case F1
xh = x1; nh = 1;
case F2
xh = x2; nh = 2;
case F3
xh = x3; nh = 3;
end
% самая низкая точка F
Fmin = min([F1 F2 F3]);
switch Fmin
case F1
xl = x1;
case F2
xl = x2;
case F3
xl = x3;
end
% Центр тяжести, спроецированный на ребро симплекса, относительно которого выполняется отображение
x4 = 1./n.*(x1+x2+x3-xh);
plot(x4(1),x4(2),'kh');
F4 = F(x4);
% проверка критерия достаточной малости симплекса
if (((F1-F4)^2+(F2-F4)^2+(F3-F4)^2)/3 < TolFun)
disp('Сходимость достигнута');
sprintf('x1 опт = %f, x2 опт = %f, Fmin = %f', xl(1), xl(2), Fmin)
break;
end
% отображаем точку
x5 = x4 + alpha*(x4-xh);
plot(x5(1), x5(2), 'ms');
F5 = F(x5);
sprintf('ЦФ в точке х5 %f', F(x5))
if (F5 < F(xh)) % в новой точке получено меньшее значение ЦФ
x(:,nh) = x5;
plot([xh(1) x5(1)], [xh(2) x5(2)], '--')
% растяжение вершины
x6 = x4 + gamma*(x4-xh);
plot (x6(1), x6(2), 'с^');
F6 = F(x6);
plot([xh(1) x6(1)], [xh(2) x6(2)], '--')
if (F6 < F5) % в новой точке получено меньшее значение ЦФ
x(:,nh) = x6;
else % сжатие вершины
x7=x4+beta*(x4-xh);
plot(x7(1), x7(2), 'cv');
F7 = F(x7);
if (F7 < F5) % в новой точке получено меньшее значен ЦФ
x(:,nh) = x7;
end
end
else % сжатие симплекса
if(x1~=xl), x(:,1)=xl+0.5*(x1-xl); end
if(x2~=xl), x(:,2)=xl+0.5*(x2-xl); end
if(x3~=xl), x(:,3)=xl+0.5*(x3-xl); end
end
x1 = x(:,1);
x2 = x(:,2);
x3 = x(:,3);
end