

4.3. Учет ограничений управляющего воздействия в спс
В реальных системах автоматического управления функциональные устройства, как правило, обладают нелинейными характеристиками. Можно утверждать, что практически все устройства автоматических систем являются нелинейными с кусочно-линейной характеристикой типа насыщение. Это обстоятельство объясняется тем, что во всех электрических, электронных, электромагнитных, и т.д. элементах выходной сигнал по мощности не может превышать мощности источника питания. Поэтому уровни напряжения и тока на выходе функциональных устройств не могут превышать аналогичных величин на выходе источника питания автоматической системы. Такие естественные ограничения могут существенно повлиять на качество системы, поэтому при синтезе системы необходимо учитывать наличие таких ограничений.
Рассмотрим, какое влияние на поведение системы окажет введение нелинейности.
Структурная схема СПС третьего порядка с нелинейным элементом представлена на рис. 4.5.

Рис.4.5 Структурная схема СПС третьего порядка с нелинейным элементом
Переходные характеристики СПС со скользящим режимом с учётом нелинейного элемента с разными начальными условиями представлены на рисунке 4.6.

Рис. 4.6. ПХ СПС со скользящим режимом с учётом НЭ с разными НУ.
Переходные характеристики СПС со скользящим режимом с учётом нелинейного элемента и без него с начальными условиями 0.4 представлены на рисунке 4.7.

Рис. 4.7. ПХ СПС со скользящим режимом с учётом НЭ и без него.
Фазовые траектории СПС со скользящим режимом с учётом нелинейного элемента с разными начальными условиями представлены на рисунке 4.8.

Рис. 4.8. Фазовые траектории СПС со скользящим режимом с учётом НЭ с разными НУ
Фазовые траектории СПС со скользящим режимом с учетом нелинейного элемента и без него с начальными условиями 0.4 представлены на рисунке 4.9.
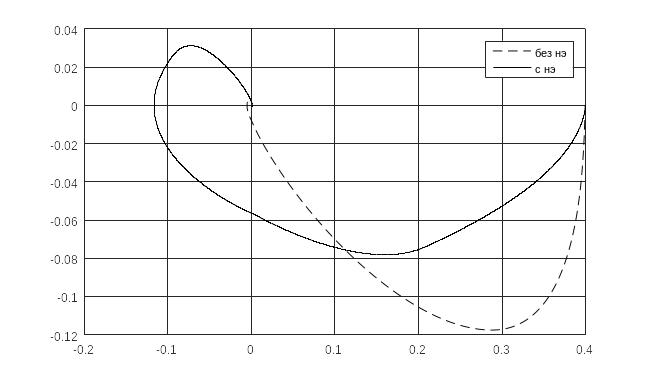
Рис. 4.9. Фазовые траектории СПС со скользящим режимом с НЭ и без него
Как видно из приведенных графиков, при введении нелинейного элемента показатели системы немного ухудшились. Таким образом, при больших рассогласованиях система с переменной структурой при ограничении управляющего воздействия ведет себя как релейная система, а потому будет неустойчивой, когда неустойчива соответствующая релейная система.
В этом случае целесообразно изменить линию переключения S = 0, отказавшись от прямой линии. Очевидным решением в данной ситуации является построение линии переключения в виде ломаной линии, состоящей из двух участков, S = S1 + S2. На участке, где |x1| < x0 построение линии переключения S1 ведется по рассмотренным выше правилам для СПС со скользящим режимом. На втором участке, где |x1| > x0, построение линии переключения S2 должно вестись по правилам релейной системы. При этих построениях следует учитывать релейную характеристику с зоной нечувствительности.
Вид фазовых траекторий релейной системы должен соответствовать устойчивой релейной системе, при этом движение в релейной системе может быть скользящим или колебательным, сходящимся к началу координат.