

6.2. Расчет периода квантования для цифровой системы по условиям ее устойчивости.
Определим период квантования по времени нарастания tн переходной характеристики.
В данном случае ωcр = 0.133 [рад/с]:

Из теории регулирования непрерывных систем известно, что


Уточним период квантования по теореме Котельникова:
Из полученных
различными способами значений периода
квантования выбирается то значение,
которое удовлетворяет обоим случаям,
т.е.
 .
Значит, максимально допустимый период
квантования сигналов равен 5.31 [с] (
.
Значит, максимально допустимый период
квантования сигналов равен 5.31 [с] ( .
.
6.3. Исследование влияния периода квантования на устойчивость системы “в малом” и “в большом”.
Структурная схема системы с широтно-импульсным модулятором представлена на рисунке 6.4.
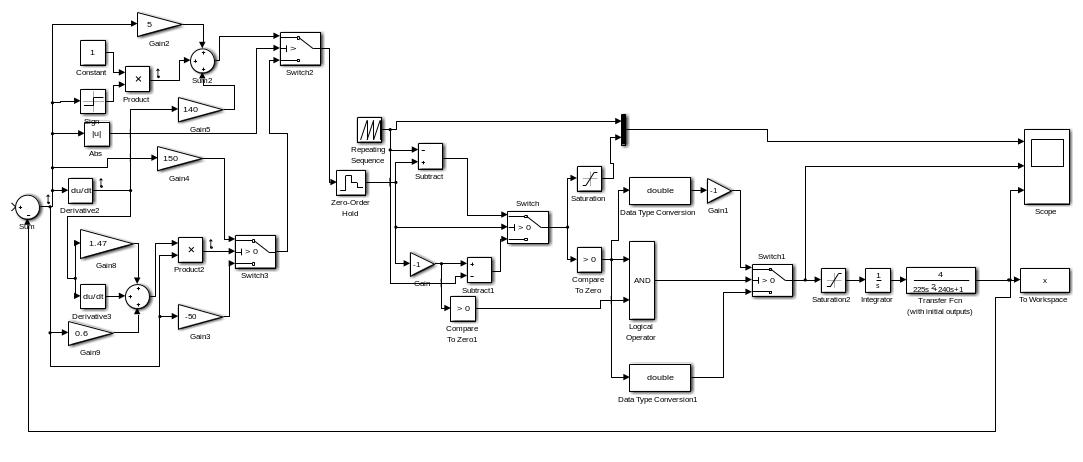
Рис. 6.4. Структурная схема системы с ШИМ.
Исследуем влияние периода квантования на устойчивость системы “в малом”. Подадим на вход системы управляющее воздействие, не выходящее за пределы линейной зоны нелинейного элемента, и построим переходные характеристики ШИМ при различных значениях периода квантования.
Переходные характеристики ШИМ при различных значениях периода квантования представлены на рисунках 6.5 и 6.6.
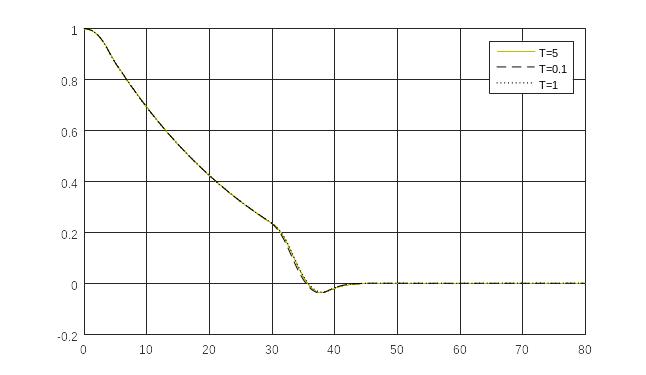
Рис. 6.5. Влияние периода квантования на устойчивость системы «в малом».
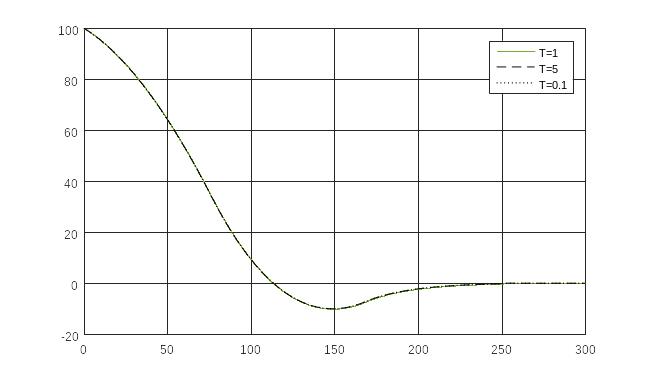
Рис. 6.6. Влияние периода квантования на устойчивость системы «в большом».
Временная диаграмма работы широтно-импульсного модулятора в «малом» при периоде квантования равном 1 (Т = 1) представлена на рисунке 6.7.
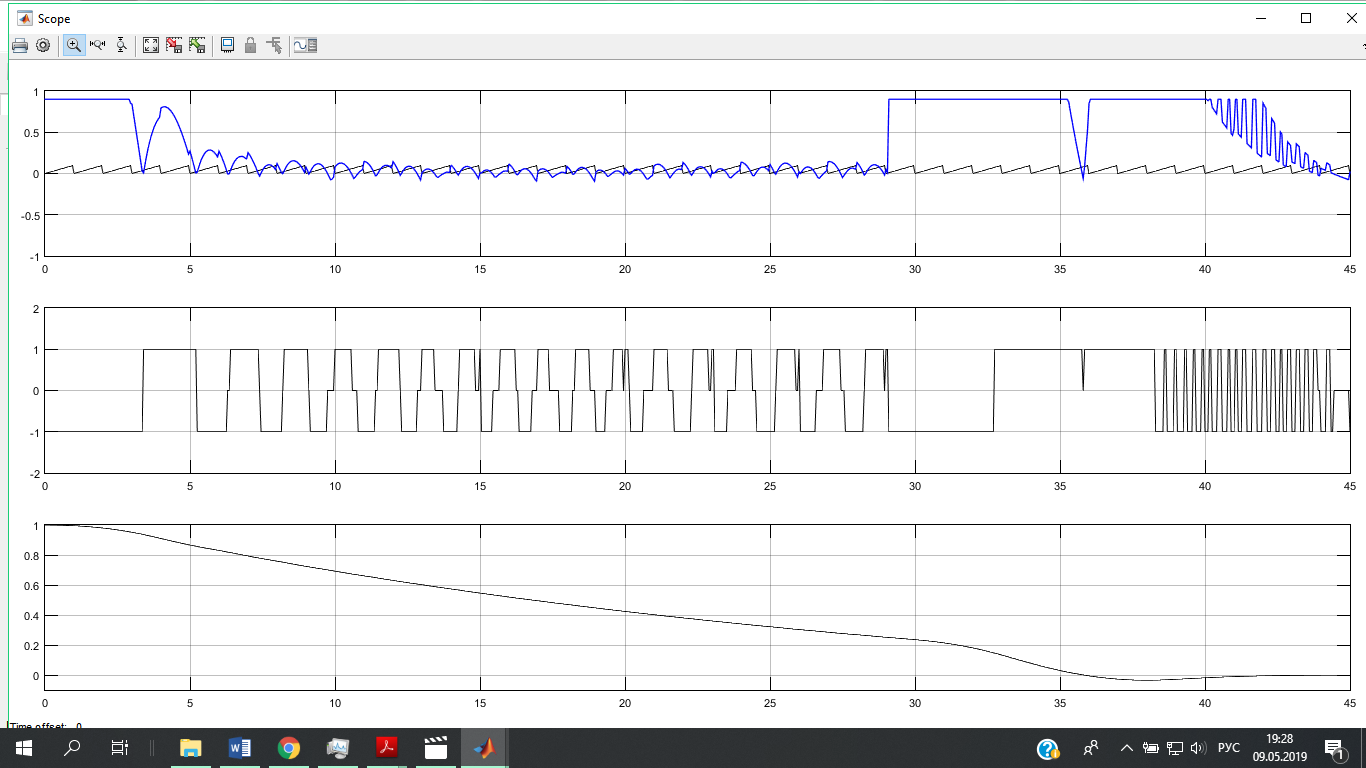
Рис. 6.7. Временная диаграмма работы ШИМ в «малом» при Т = 1с
Временная диаграмма работы широтно-импульсного модулятора в «большом» при периоде квантования равном 1 (Т =1 c) представлена на рисунке 6.8.
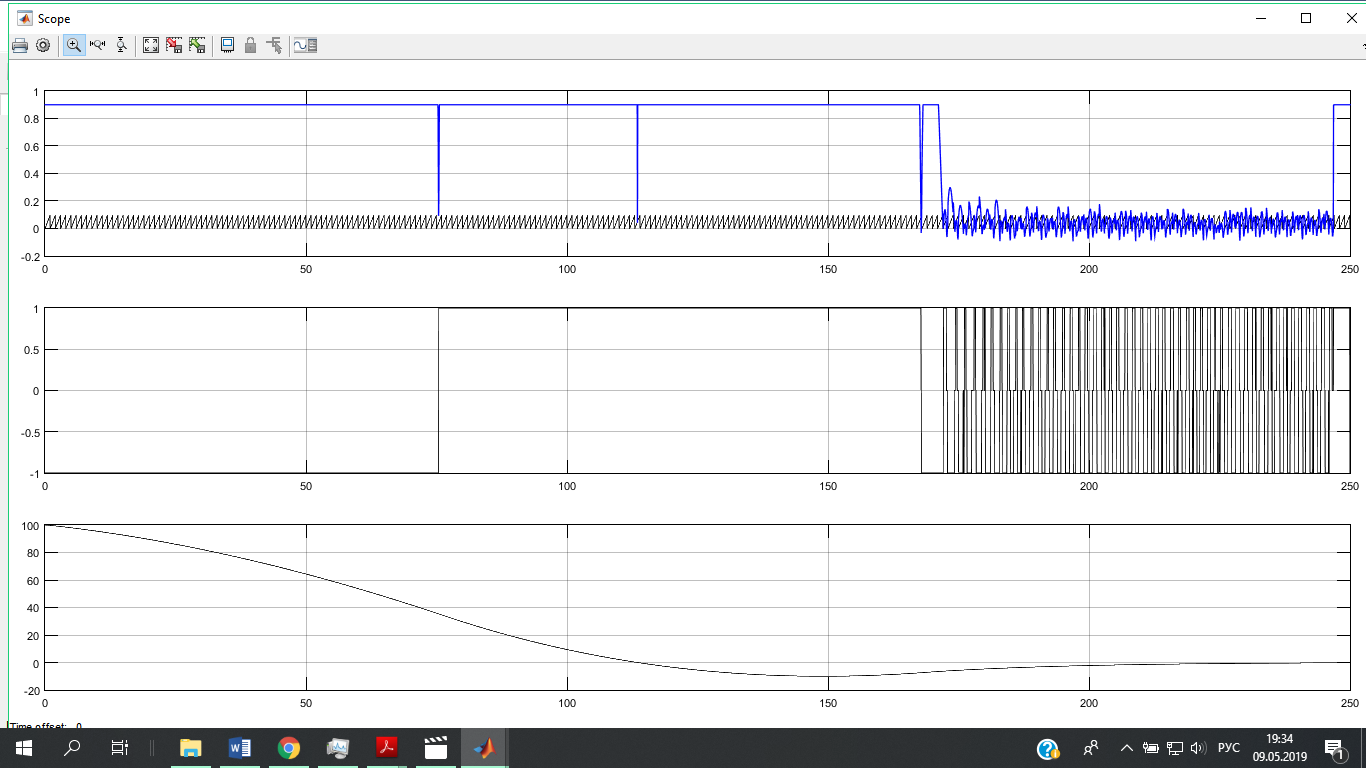
Рис. 6.8. Временная диаграмма работы ШИМ в «большом» при Т =1 с.
Заключение
В результате проделанной работы, было разработано управляющее устройство, обеспечивающее качественные показатели системы:
Минимальное время переходного процесса;
Точность поддержания выходной координаты в установившемся режиме менее 0.5%;
Характер переходного процесса: апериодический с перерегулированием (σ ≤ 10 %)
Запас устойчивости в “малом” по амплитуде равен 63 дБ (более 20 дБ), по фазе 98
 (более
);
(более
);Максимально допустимый период квантования 5.31с.
Список использованной литературы
Теория управления. Нелинейные дискретные системы / Под ред. Б.В. Бруслиновский, А.М. Усачёв. – СПб.: СПбГЭТУ «ЛЭТИ», 2005. – 88 с. (Учебное пособие)
Конспекты лекций и практических занятий.