

5. Синтез нелинейной спс при больших отклонениях от равновесного состояния
5.1. Анализ и синтез релейной системы
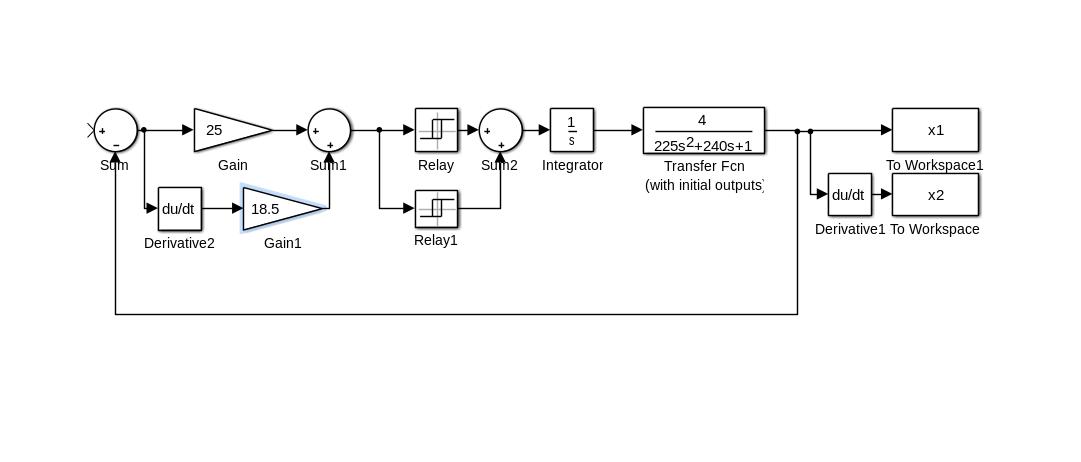
Рис. 5.1. Структурная схема релейной системы управления с обратной связью
Спроектированная система является устойчивой “в малом”, но неустойчивой “в большом”, поэтому синтезируем релейную систему соответствующую данной при отклонениях превышающих линейную зону нелинейного звена с насыщением. Звено с насыщением в этом случае будем рассматривать как реле с зоной нечувствительности – трехпозиционное реле.
Система состоит из линейной части с передаточной функцией W(p)=R(p)/Q(p), релейного элемента и пропорционально-дифференциального регулятора. Как будет показано ниже, структура и параметры регулятора существенным образом влияют свойства релейной системы, в том числе и на устойчивость, что необходимо при построении нелинейных систем с переменной структурой.
Чтобы получить трехпозиционное реле без гистерезиса, собираем схему из суммы двух релейных звеньев (двухпозиционное реле с гистерезисом) и настраиваем релейные элементы (Relay) следующим образом:
Relay1: Relay2:
Switch on point: 0.9; Switch on point: -0.9;
Switch off point: 0.9; Switch off point: -0.9;
Output when on: 0.9; Output when on: 0;
Output when off: 0. Output when off: -0.9.
Определим с помощью моделирования параметры пропорционально-дифференциального регулятора, которые обеспечат существование автоколебательного режима.
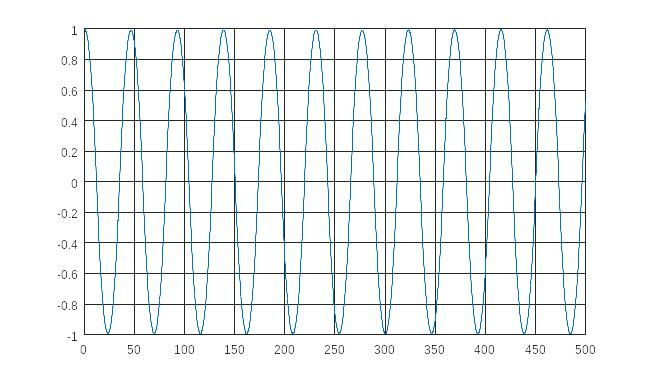
Рис. 5.2. Автоколебания в релейной системе управления.
Фазовая траектория в релейной системе управления:
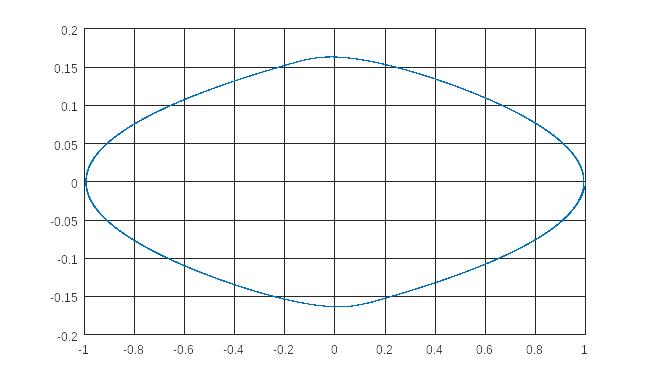 Рис. 5.3. Фазовая траектория
Рис. 5.3. Фазовая траектория
В результате синтеза для рассматриваемого случая уравнение линии переключения получится в виде: S2 = 25x1 + 18.5x2 + d.
5.2. Исследование свойств спроектированной нелинейной спс
На первом этапе нами была синтезирована СПС без учета нелинейности с линией скольжения S1, проходящей через начало координат. Затем для синтеза СПС с нелинейным элементом (НЭ) мы синтезировали релейную систему для больших отклонений с линией переключения S2 = 5x1 + 140x2 + d , где значение d определяется координатами точки пересечения линий S1 и S2. Значение d определяет характер процесса в СПС на завершающей стадии движения. Для получения требуемого вида процесса и улучшения показателей системы коэффициенты усиления были скорректированы. Структурная схема для моделирования представлена на рис. 5.5
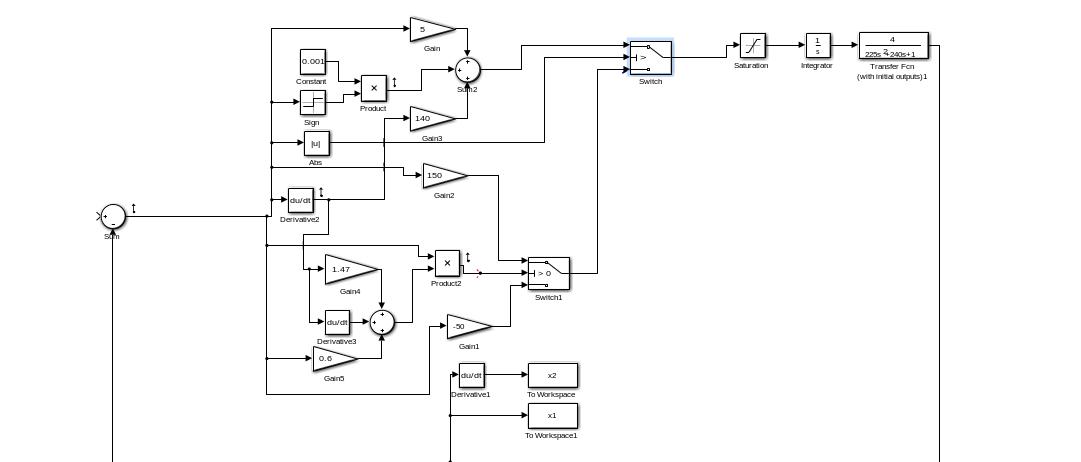
Рис. 5.5. Структурная схема нелинейной СПС
Параметры синтезированной нелинейной СПС отличаются от параметров, полученных при синтезе СПС без учета нелинейности и релейной системы для больших отклонений.
Переходные процессы в разработанной системы в “малом” при различных значениях d представлены на рисунке 5.6.
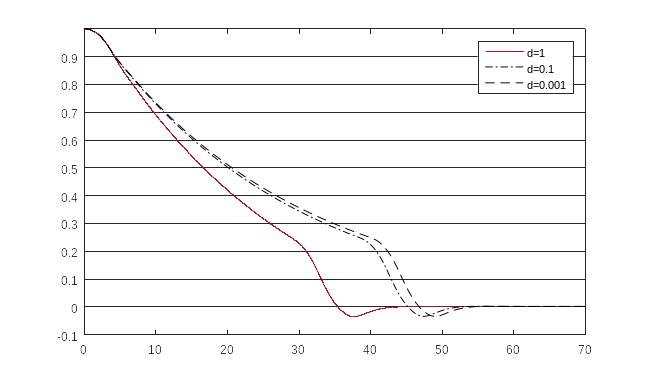
Рис. 5.6. Переходные характеристики нелинейной СПС в “малом” при различных значениях d.
Фазовые траектории спроектированной системы на малом отклонении представлены на рисунке 5.7.
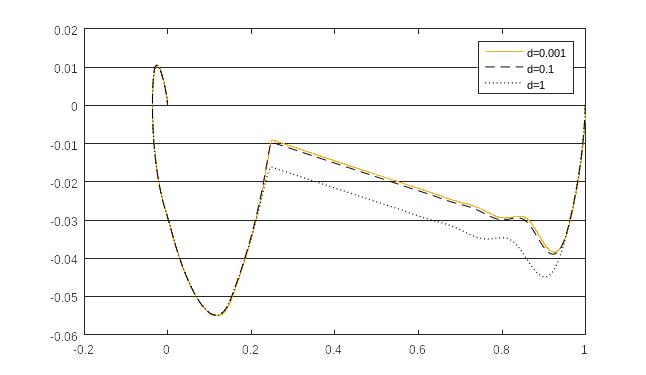
Рис. 5.7. Фазовые траектории нелинейной СПС в “малом” при различных значениях d.
Переходные процессы в спроектированной системе в “большом” при различных значениях d представлены на рисунке 5.8.
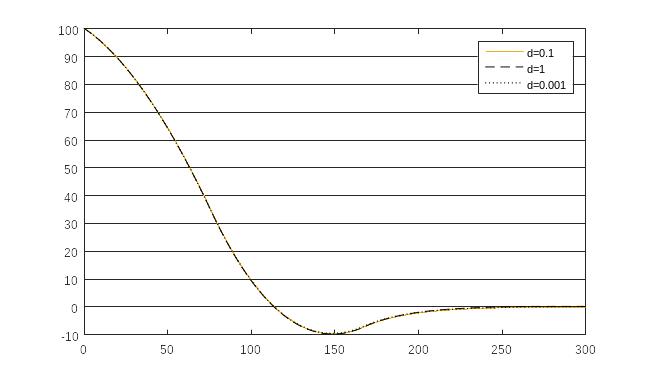
Рис. 5.8. Переходные характеристики нелинейной СПС в “большом” при различных значениях d.
Фазовые траектории спроектированной системы на большом отклонении представлены на рисунке 5.9.
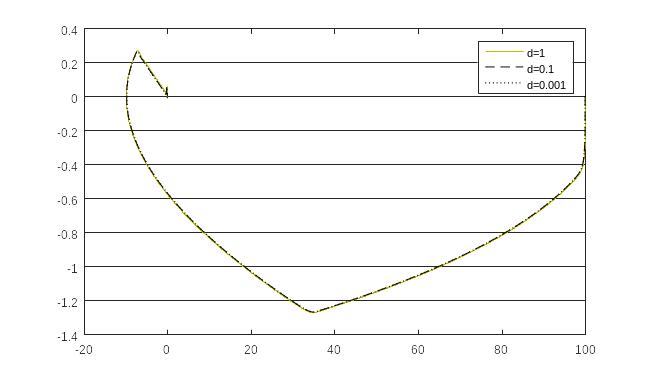
Рис. 5.9. Фазовые траектории нелинейной СПС в “большом” при различных значениях d.
Точность поддержания выходной координаты в установившемся режиме при d=1 составила ε = 0.4% – что удовлетворяет заданным требованиям точности ε ≤ 0.5%.