

1 сем маг / Нуртазин_5000
.docxMachine programming
The programmed instructions determine the set of actions that is to be accomplished automatically by the system. The program specifies what the automated system should do and how its various components must function in order to accomplish the desired result. The content of the program varies considerably from one system to the next. In relatively simple systems, the program consists of a limited number of well-defined actions that are performed continuously and repeatedly in the proper sequence with no deviation from one cycle to the next. In more complex systems, the number of commands could be quite large, and the level of detail in each command could be significantly greater. In relatively sophisticated systems, the program provides for the sequence of actions to be altered in response to variations in raw materials or other operating conditions.
Programming commands are related to feedback control in an automated system in that the program establishes the sequence of values for the inputs (set points) of the various feedback control loops that make up the automated system. A given programming command may specify the set point for the feedback loop, which in turn controls some action that the system is to accomplish. In effect, the purpose of the feedback loop is to verify that the programmed step has been carried out. For example, in a robot controller, the program might specify that the arm is to move to a designated position, and the feedback control system is used to verify that the move has been correctly made. The relationship of program control and feedback control in an automated system is illustrated in Figure 2.
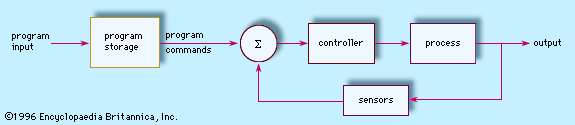
Fig. 2
Some of the programmed commands may be executed in a simple open-loop fashion—i.e., without the need for a feedback loop to verify that the command has been properly carried out. For example, a command to flip an electrical switch may not require feedback. The need for feedback control in an automated system might arise when there are variations in the raw materials being fed into a production process, and the system must take these variations into consideration by making adjustments in its controlled actions. Without feedback, the system would be unable to exert sufficient control over the quality of the process output.
The programmed commands may be contained on mechanical devices (e.g., mechanical cams and linkages), punched paper tape, magnetic tape, magnetic disks, computer memory, or any of a variety of other media that have been developed over the years for particular applications. It is common today for automated equipment to use computer storage technology as the means for storing the programmed commands and converting them into controlled actions. One of the advantages of computer storage is that the program can be readily changed or improved. Altering a program that is contained on mechanical cams involves considerable work.
Programmable machines are often capable of making decisions during their operation. The decision-making capacity is contained in the control program in the form of logical instructions that govern the operation of such a system under varying circumstances. Under one set of circumstances, the system responds one way; under different circumstances, it responds in another way. There are several reasons for providing an automated system with decision-making capability, including (1) error detection and recovery, (2) safety monitoring, (3) interaction with humans, and (4) process optimization.
Error detection and recovery is concerned with decisions that must be made by the system in response to undesirable operating conditions. In the operation of any automated system, malfunctions and errors sometimes occur during the normal cycle of operations, for which some form of corrective action must be taken to restore the system. The usual response to a system malfunction has been to call for human assistance. There is a growing trend in automation and robotics to enable the system itself to sense these malfunctions and to correct for them in some manner without human intervention. This sensing and correction is referred to as error detection and recovery, and it requires that a decision-making capability be programmed into the system.
Safety monitoring is a special case of error detection and recovery in which the malfunction involves a safety hazard. Decisions are required when the automated system sensors detect that a safety condition has developed that would be hazardous to the equipment or humans in the vicinity of the equipment. The purpose of the safety-monitoring system is to detect the hazard and to take the most appropriate action to remove or reduce it. This may involve stopping the operation and alerting maintenance personnel to the condition, or it may involve a more complex set of actions to eliminate the safety problem.
Automated systems are usually required to interact with humans in some way. An automatic bank teller machine, for example, must receive instructions from customers and act accordingly. In some automated systems, a variety of different instructions from humans is possible, and the decision-making capability of the system must be quite sophisticated in order to deal with the array of possibilities.
A fourth reason for decision making in an automated system is to optimize the process. The need for optimization occurs most commonly in processes in which there is an economic performance criterion whose optimization is desirable. For example, minimizing cost is usually an important objective in manufacturing. The automated system might use adaptive control to receive appropriate sensor signals and other inputs and make decisions to drive the process toward the optimal state.
Машинное программирование
Запрограммированные инструкции определяют набор действий, которые должны быть выполнены системой автоматически. Программа точно определяет, что должна делать автоматизированная система и как должны функционировать ее различные компоненты для достижения желаемого результата. Содержание программы сильно варьируется от одной системы к другой. В относительно простых системах программа состоит из ограниченного числа четко определенных действий, которые выполняются непрерывно и многократно в правильной последовательности без отклонений от одного цикла к другому. В более сложных системах количество команд может быть довольно большим, а уровень детализации каждой команды может быть значительно выше. В относительно сложных системах программа предусматривает изменение последовательности действий в ответ на изменения в исходном материале или других условиях эксплуатации.
Команды программирования связаны с регулятором в цепи обратной связи в автоматизированной системе в том плане, что программа устанавливает последовательность значений для входов (заданных значений) различных контуров управления с обратной связью, составляющих автоматизированную систему. Данная программная команда может устанавливать уставку для контура обратной связи, управляющая, в свою очередь, некоторым действием, которое должна выполнить система. Фактически, цель контура обратной связи - убедиться, что запрограммированный этап выполнен. Например, в контроллере робота программа может указывать, что рука должна переместиться в указанное положение, а система управления с обратной связью используется для проверки правильности перемещения. Взаимосвязь программного управления и управления с обратной связью в автоматизированной системе проиллюстрирована на рисунке 2.
Рис. 2
Некоторые из запрограммированных команд могут выполняться простым способом открытой системы, то есть без необходимости в операторе цикла обратной связи для проверки правильности выполнения команды. Например, команда щелкнуть электрическим выключателем может не требовать обратной связи. Потребность в управлении с обратной связью в автоматизированной системе может возникнуть, когда есть различия в исходном материале, подаваемом в производственный процесс, и система должна учитывать эти изменения, внося коррективы в свои контролируемые действия. Без обратной связи система не смогла бы в достаточной степени контролировать качество выходных данных процесса.
Запрограммированные команды могут содержаться на механических устройствах (например, механических зацепов и рычажных механизмах), перфорированной бумажной ленте, магнитной ленте, магнитных дисках, компьютерной памяти или любом из множества других носителей, которые разрабатывались годами для конкретных приложений. Сегодня для автоматизированного оборудования обычным явлением является использование компьютерной технологии хранения данных в качестве средства для хранения запрограммированных команд и преобразования их в управляемые действия. Одним из преимуществ компьютерного хранилища является то, что программу можно легко изменить или улучшить. Изменение программы механических зацепов требует значительных усилий.
Программируемые машины часто способны принимать решения во время своей работы. Способность принимать решения содержится в программе управления в форме логических инструкций, которые управляют работой такой системы при различных обстоятельствах. При определенных обстоятельствах система реагирует одним способом; при других обстоятельствах он реагирует по-другому. Есть несколько причин для предоставления автоматизированной системы с возможностью принятия решений, включая обнаружение и устранение ошибок, мониторинг безопасности, взаимодействие с людьми и оптимизацию процесса.
Обнаружение и устранение ошибок связано с решениями, которые система должна принять в ответ на нежелательные условия эксплуатации. В работе любой автоматизированной системы сбои и ошибки иногда возникают во время обычного цикла операций, для которых необходимо предпринять определенные корректирующие действия для восстановления системы. Обычной реакцией на неисправность системы было обращение за помощью оператора. В автоматизации и робототехнике наблюдается растущая тенденция, позволяющая самой системе определять эти неисправности и исправлять их каким-либо образом без вмешательства человека. Это обнаружение и исправление называется обнаружением и восстановлением ошибок, и для этого требуется, чтобы в системе была запрограммирована возможность принятия решений.
Мониторинг безопасности — это особый случай обнаружения и устранения ошибок, при котором неисправность связана с угрозой безопасности. Решения требуются, когда датчики автоматизированной системы обнаруживают, что условия безопасности отрабатывают потенциально опасные условия для оборудования или людей в непосредственной близости от оборудования. Целью системы контроля безопасности является обнаружение опасности и принятие наиболее подходящих мер для ее устранения или уменьшения. Это может включать остановку работы и оповещение обслуживающего персонала об этом состоянии, или может потребоваться более сложный набор действий для устранения опасной ситуации.
Автоматизированные системы обычно должны каким-то образом взаимодействовать с людьми. Например, банкомат должен получать инструкции от клиентов и действовать соответствующим образом. В некоторых автоматизированных системах возможно выполнение множества различных инструкций от людей, и способность системы принимать решения должна быть достаточно сложной, чтобы иметь дело с множеством возможностей.
Четвертая причина для принятия решений в автоматизированной системе - оптимизация процесса. Потребность в оптимизации чаще всего возникает в процессах, в которых существует критерий экономической эффективности, оптимизация которого необходима. Например, минимизация затрат обычно является важной задачей в производстве. Автоматизированная система может использовать адаптивное управление для получения соответствующих сигналов датчиков и других входных данных и принятия решений, чтобы привести процесс к оптимальному состоянию.