

ЛабТММ_1
.pdf•переміщення, швидкості та прискорення будь-якої точки на ланках механізму;
•маси та моменти інерції ланок;
•зовнішні сили, що діють на ланки, і точки їх прикладання.
Необхідно визначити:
•реакції в кінематичних парах;
•зрівноважувальну силу на тягових ланквх для технологічних машин, або
технологічну силу (силу корисного опору) для двигунів.
Зрівноважувальна сила або зрівноважувальний момент є такою силою або моментом, які необхідно прикласти до початкової ланки, щоб вона рухалася за заданим законом.
Динамічний аналіз механізмів належить до першої задачі механіки, в якій необхідно визначити сили, що діють в механізмі, при відомому законі руху тягової ланки.
Сили, що діють у машинах, поділяють на дві основні групи:
1.Рушійні сили, які діють у бік руху тіла, тобто намагаються прискорити його рух.
2.Сили опору, які діють проти руху тіла, тобто намагаються сповільнити його рух. Сили опору поділяються на сили корисного опору, до яких відносять технологічні
опори руху, на подолання яких при виконанні технологічного процесу витрачається робота, та сили шкідливого опору, до яких відносяться сили тертя в кінематичних парах, а також опір середовища. Розрізняють також сили тяжіння ланок, сили інерції та сили реакцій у кінематичних парах. Сила тяжіння є результатом взаємодії ланок із Землею. Сили інерції з’являються при зміні швидкості за величиною або за напрямком. Сили реакцій виникають при взаємодії ланок у місцях їх стикання, тобто у кінематичних парах.
Для розв’язку поставленої задачі використовують принцип Даламбера, згідно з яким рухома система тіл перебуває у кожний момент часу в рівновазі під дією зовнішніх сил, включно з силами інерції. Отже, задача динаміки розв’язується методами статики, якщо до зовнішніх сил віднести також сили (моменти сил) інерції. Такий розрахунок називають кінетостатичним розрахунком. Задача про знаходження сил легко розв’язується для статично визначених систем. Можна показати, що статично визначеними є кінематичні ланцюги з нульовим степенем вільності, отже структурні групи є статично визначеними, а тому при силовому розрахунку доцільно розглядати рівновагу окремих структурних груп.
Кінетостатичний розрахунок механізмів аналітичним методом ефективно виконувати за допомогою комп’ютера. Запропонована для виконання лабораторної роботи програма написана на алгоритмічній мові Turbo PASCAL 7 /3/ і складається з кількох модулів. За допомогою програми можна проводити кінетостатичне дослідження механізмів ІІ класу з групами Ассура І-ІІІ видів довільної структури. Програма обчислює крім реакцій у кінематичних парах, зрівноважувальну силу методом важеля Жуковського, зведені до тягової ланки момент інерції механізму і момент сил опору. Програма складена за аналітичними залежностями, наведеними у роботі /4/.
Щоб скористуватися програмою, необхідно задати послідовність обчислень груп Ассура згідно структурної формули побудови механізму. Для кожної групи Ассура складена підпрограма обчислень. Необхідно задати замість формальних параметрів підпрограм фактичні значення заданого механізму. Назви кінематичних пар треба обов’язково задавати великими буквами.
Сили тяжіння, інерції і моменти сил інерції обчислюються автоматично. Користувачу необхідно задати величини і напрямки інших активних сил, які діють на ланки механізму.
Підпрограма SFxyM(i,j: Byte; kpM,kpL,kpH :CHAR; mi,mj,Jji,JJj :real);
13
Підпрограма обчислює суму проекцій на осі координат всіх активних сил, які діють на групу чи ланки групи, і суму моментів, які діють на ланки групи, відносно зовнішніх або внутрішніх кінематичних пар групи. Формальні параметри підпрограми мають такі значення:
i,j - номера ланок групи Ассура;
kpM,kpL,kpH - назви кінематичних пар: kpM і kpH - зовнішніх кінематичних пар
групи Ассура, kpL - внутрішньої кінематичної пари; mi,mj - маси і-ої та j–ої ланок групи Ассура відповідно;
Jji,JJj - моменти інерції і-ої та j–ої ланок відносно їхніх центрів мас.
Підпрограма FAGA’a’(i,j,k,q : Byte; kpM,kpL,kpH :CHAR);
Підпрограма обчислює реакції в кінематичних парах групи Ассура ’a’. Для груп Ассура ІІ класу І виду ’a’=21, Для груп Ассура ІІ класу ІІ виду
’a’=22. Для груп Ассура ІІ класу ІІІ виду ’a’=23. i,j - номери ланок групи Ассура;
k,q - номери ланок механізму, які приєднуються , відповідно, до ланки «і» та «j»; kpM,kpL,kpH - назви кінематичних пар: kpM і kpH - зовнішніх кінематичних пар групи Ассура, kpL - внутрішньої кінематичної пари.
Приклад виконання комп’ютерного розрахунку.
Обчислити реакції в кінематичних парах механізму і зрівноважувальний момент на тяговій ланці. Кінематична схема механізму приведена на рис.7 (див. Лабораторну роботу №3).
n = 720хв−1 ; |
l |
= 0,2м, l |
2 |
= 0,7м, |
|
l |
3 |
= |
0,53м, |
l |
4 |
= 0,8м, |
l |
OS |
= 0,1м, |
l |
AS |
= 0,25м. |
||||||
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
lСS3 |
= 0,5lCB , |
lBS4 = 0,5lBD ; |
|
m1 = 3кг, |
|
m2 |
=10кг, |
|
m3 = 7кг, |
|
m4 |
= 5кг, |
m5 |
=15кг, |
||||||||||
J |
S |
= 0,1кг м2 |
, |
J |
S |
= 0,6кг м2 , J |
S |
|
= 0,8кг м2 , |
|
|
J |
S |
=1кг м2 , |
F = 500H. |
|||||||||
|
|
|
|
2 |
|
|
3 |
|
|
|
|
|
|
4 |
|
|
0 |
|
|
|
||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Кут нахилу кривошипа до осі абсцис дорівнює ϕ1 = 600 . Відстані між опорами задані в
метрах.
Розв’язок.
Структурна формула побудови механізму: І(0 −1) → ІІ(2 −3) → ІІ(4 −5) .
Програма розрахунку кінетостатичних характеристик матиме вигляд: PROGRAM KSAMIIKL;
Uses Printer, CRT, mat, kaga, mas_faga, faga, PRNT; BEGIN
KAGA1(1, 1, 720, 60, 0.2, O, A, 0.1);
KAGA21(1, 2, 3, 0.7, 0.53,
A, B, C,
0.5, -0.1, 0, 0, 0, 0, 1, 1, 0.25, 0.265, 0);
KAGA22(4, 5, B, D, D, 180, 0.8, 0, 0.48, 0, 1, 1, 1, 0.4, 0, 0, 0);
SFxyM(4, 5, B, D, D, 5, 15, 1, 0);
14

FAGA22(4, 5, 3, 0, B, D, D); SFxyM(2, 3, A, B, C, 10, 7, 0.6, 0.8); FAGA21(2, 3, 1, 0, A, B, C); SFxyM(1, 0, A, O, O, 3, 0, 0.1, 0); FAGA1(1, 0, 2, O, A);
MBP; {обчислює зведений до тягової ланки момент інерції механізму і зведений момент активних силових факторів, що діють на механізм}
DRUK;
END.
Послідовність виконання роботи.
1.Для заданого механізму виконати структурний аналіз та скласти структурну формулу побудови механізму.
2.Підготувати числові дані для роботи комп’ютерної програми.
3.Виконати розрахунки на комп’ютері.
4.Порівняти результати комп’ютерного розрахунку з результатами, отриманими графоаналітичним методом планів.
Контрольні запитання.
1.Задачі динамічного дослідження.
2.Зрівноважувальна сила. Зрівноважувальний момент.
3.Сили, що діють на ланки механізму.
4.Чому динамічний розрахунок називається кінетостатичним?
5.Довести статичну визначеність структурної групи.
Лабораторна робота №5.
Визначення механічних параметрів ланок механізму.
Мета роботи: ознайомлення з експериментальними методами визначення центра мас та моменту інерції ланки.
Обладнання:досліджувана ланка, лінійка, призма на опорі, секундомір.
Теоретичні відомості.
При розв’язку задач динаміки механізмів необхідно враховувати механічні параметри ланок: масу кожної ланки т; положення центра мас С та момент інерції J. Маса є мірою інертності ланки при поступальному русі. Від характеру геометричного розміщення маси у ланці залежить положення центра мас. Момент інерції є мірою інертності ланки в обертовому русі. Він одночасно враховує і величину маси, і закономірність її розподілу в ланці. Для суцільного тіла момент інерції виражається інтегралом :
J0 = ∫r 2 dm , |
(3) |
де інтегрування виконується по всій масі ланки. |
[кг м2 ]. |
Моменти інерції вимірюються додатними числами розмірності |
|
Відношення J0 m = ρ02 має розмірність квадрата довжини. Величину ρ0 |
називають |
радіусом інерції ланки відносно осі О, для якої визначений момент J0 . |
|
На практиці зазвичай розглядають плоский рух ланок. Тому важливим є визначення моменту інерції відносно осі, перпендикулярної до площини руху ланки. Часто в розрахунках ця вісь є центральною, тобто вона проходить через центр мас ланки.
15

Зв’язок між моментами інерції відносно паралельних осей, одна з яких є центральною, встановлюється формулою:
J0 = JC + ml 2 , |
(4) |
де J0– момент інерції відносно деякої осі О; JC - центральний момент інерції;
l - відстань від центру мас до осі О.
Механічні параметри ланок можуть визначатися як розрахунковим шляхом, так і експериментально. Перший спосіб застосовується для однорідних ланок простої форми. У випадку неоднорідних тіл та тіл, що мають складну геометричну форму, визначення механічних параметрів виконується експериментально.
Визначення маси ланки – виконується шляхом порівняння з еталонами маси, тобто зважуванням.
Визначення центра мас ланки виконується різними способами в залежності від форми та ромірів ланки. Розглянемо деякі з цих способів, які застосовуються до ланок симетричної форми:
1.Визначення центра мас на призмі (рис.8,а). Ланку розміщають на горизонтальному ребрі призми таким чином, щоб вона знаходилась у рівновазі. Точки дотику ланки з призмою відмічають та з’єднують прямою лінією. Точка перетину цієї лінії з віссю симетрії ланки співпадає з центром мас.
2.Визначення центра мас за допомогою виска (рис.8,б). Ланку підвішують на одній нитці, прикріпленій до двох кінців ланки. У точці підвісу закріплюють висок. Центр мас знаходиться на перетині прямовисної лінії з віссю симетрії ланки.
3.Метод реакцій (рис.8,в). Ланку розміщають на двох призмах, одна з яких встановлюється на шальку терезів, а друга, що регулюється по висоті, - на нерухому основу. Другу шальку терезів врівноважують гирями. По вазі гирь визначають
реакцію RВ. З умови рівноваги ланки можна визначити координату а центра мас: a = RGB L , де G - вага ланки; L =а+b - відстань між опорами ланки.
a b
C
|
а) |
|
|
|
b |
|
|
|
|
a |
|
RB |
b |
|
|
a |
|
|
|
|
|||
B |
|
|
|
A |
C |
|
|
|
|
||
|
|
C |
G |
|
|
|
|
|
|
б) |
|
|
|
|
|
|
в)
Рис.8
Визначення моменту інерції ланки:
1. Метод фізичного маятника застосовують до таких ланок, які можна підвішувати за дві точки, що розміщені на поздовжній осі симетрії ланки по обидві
16

сторони від центра мас (шатуни, кривошипи, важелі, тощо). Досліджуване тіло підвішують (рис.9) та надають йому малих коливань. В цьому випадку ланка представляє собою фізичний маятник з віссю обертання О1, що називається віссю підвісу. Якщо знехтувати тертям в опорі О1 та опором повітря, то рівняння руху фізичного маятника можна записати як: J1ϕ + mgl1 sinϕ = 0 , де J1– момент інерції
ланки відносно осі підвісу О1, m - маса ланки,l1 - відстань від центра мас до осі підвісу. Отримане рівняння описує гармонічні
|
O |
коливання |
з частотою |
ν = |
mgl1 |
та |
періодом |
|||
|
1 |
J1 |
||||||||
l |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
2π |
|
J1 |
|
|
|
|
коливань |
Т |
1 |
= |
= 2π |
, |
звідки |
||
|
|
|
|
|
ν |
|
mgl |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
l2 |
|
|
|
ϕ |
|
|
T 2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
J |
|
= |
mgl . Для визначення |
центрального |
|||
|
|
|
|
|
|
|
1 |
||||||
|
|
|
|
C |
|
4π 2 |
|||||||
|
|
|
|
|
|
1 |
|
1 |
|
|
|
||
|
|
|
|
|
|
моменту інерції застосовуємо формулу (4): |
|||||||
|
|
|
|
G |
|
|
|
|
JC |
= J1 −ml12 = ml1 ( |
T 2 |
g −l1 ) |
(5) |
|
|
|
|
|
|
|
|
||||||
O |
2 |
|
|
|
|
|
1 |
||||||
|
|
|
|
4π 2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Рівняння (5) є розрахунковим для визначення |
|||||||
|
|
|
Рис.9 |
|
|||||||||
|
|
|
|
центрального моменту інерції досліджуваної ланки. |
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Величини |
m, Т1, l1 знаходять експериментально. Якщо |
||||||
|
|
|
|
|
|
||||||||
відстань l1 невідома та не може бути виміряною, то для її визначення виконують ще одне дослідження. Ланку підвішують за другу точку підвісу О2 та вимірюють період коливань Т2. Момент інерції JС ланки знаходиться за формулою, аналогічною формулі (5):
|
J |
|
= J |
|
−ml 2 = ml |
|
( |
T 2 |
g −l |
|
) |
(6) |
|||||
|
C |
|
|
2 |
|
|
|||||||||||
|
|
|
4π |
|
|
||||||||||||
|
|
|
|
2 |
|
|
2 |
2 |
|
2 |
|
|
2 |
|
|
||
Враховуючи, що |
l1 +l2 |
= l , |
та розв’язуючи |
|
сумісно отримані |
рівняння |
|||||||||||
відносно координати , l1 центра мас, отримуємо: |
|
|
|
|
|
|
|||||||||||
|
|
|
l1 |
= l |
|
4π 2l −T 2 g |
|
|
|
|
|
(7) |
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
|
|
8π |
2l −(T 2 |
+T 2 )g |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
Треба відмітити, |
що |
у |
|
фізичного |
|
маятника |
|
ізохронними є тільки малі |
|||||||||
коливання, тому при експерименті ланка повинна відхилятися на кути, які не перевищують 5-10 градусів.
2. |
|
Метод крутильних коливань використовується для |
деталей, які мають вісь |
|||||||||||||||
|
|
|
|
|
3 |
|
|
обертання, що |
співпадає |
з |
центральною |
віссю |
||||||
|
|
|
|
|
|
|
(колінчасті та прямолінійні вали, зубчасті колеса, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
шківи, тощо). Дослідження виконуються на |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
2 |
|
|
приладі, |
зображеному на |
рис.10. |
Стояк |
4 |
з |
|||
|
L |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
кронштейном 3, в якому жорстко закріплений |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
4 |
верхній |
кінець |
сталевого |
дроту 2 |
діаметром |
d |
||||
|
|
|
|
|
|
|
|
вільної |
довжини L. До |
нижнього |
кінця |
дроту |
||||||
|
|
|
|
|
|
|
|
|||||||||||
1жорстко приєднаний патрон 1, в якому встановлюється досліджувана ланка. На
кронштейні змонтований пристрій, що надає ланці

 тільки крутильні коливання. Повернувши досліджувану ланку разом з патроном на кут 5-10 Рис.10 градусів, можна визначити період малих коливань системи. Диференціальне рівняння цих коливань
тільки крутильні коливання. Повернувши досліджувану ланку разом з патроном на кут 5-10 Рис.10 градусів, можна визначити період малих коливань системи. Диференціальне рівняння цих коливань
17
має вигляд: |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
(J + J0 )ϕ + M = 0, |
|
|
|
|
|
(8) |
||||||
де J , J0 - моменти інерції досліджуваної ланки та патрона відповідно. |
|
||||||||||||||
|
Відновлюючий момент М визначається з рівняння пружного закручування |
||||||||||||||
дроту: |
|
|
|
ML |
|
|
|
|
|
|
|
|
|||
|
|
|
ϕ = |
|
|
|
|
|
|
|
(9) |
||||
|
|
|
GJ p |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
де G - модуль пружності другого роду (для сталі G =80 Гпа); |
|
|
|
|
|
||||||||||
J p = |
πd |
4 |
- полярний момент інерції перерізу дроту. |
|
|
|
|
|
|
||||||
32 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Період крутильних коливань визначається з формули: T = 2π |
|
(J + J0 )L , звідки: |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
GJ p |
|
|
|
|
|
J = |
T 2 |
|
GJ p |
− J0 . |
|
|
|
|
|
(10) |
||
|
|
|
4π 2 |
|
L |
T 2 |
|
GJ p |
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
Момент інерції патрона визначається аналогічно J0 = |
|
|
Т0 – період |
||||||||||||
0 |
|
|
, де |
||||||||||||
4π 2 |
L |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
коливань патрона.
3
2
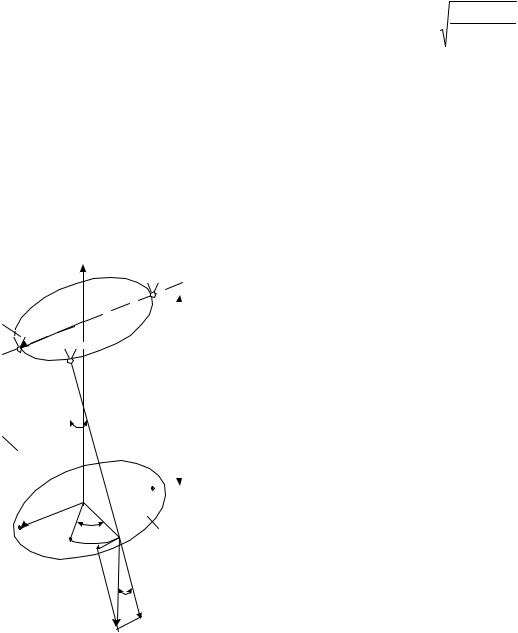
3. Методом підвісу на трьох нитках визначається момент інерції ланки, яка має форму тіла обертання (зубчасті колеса, маховики, тощо). Прилад (рис.11)
складається зі стояка 3, до якого на трьох нитках однакової довжини l прикріплений диск 1. Нитки рівновіддалені від осі диска OZ. На диску 1 намальовані концентричні
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
кола, |
які використовуються для суміщення |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центра тяжіння досліджуваної ланки з віссю |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
диска. Досліджувана ланка розміщується на |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
R1 |
|
O1 |
|
|
|
|
|
|
|
|
|
диску 1 так, щоб її центр тяжіння знаходився на |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вертикальній осі, яка проходить через центр О |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
диска. Якщо диск з розташованою на ньому |
||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ланкою повернути на кут ψ = 5 −80 |
навколо |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
центральної осі Z та відпустити, то він почне |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коливатися. Диференціальне рівняння малих |
||||
|
|
|
|
|
ϕ |
|
|
|
|
|
|
|
|
|
коливань системи має вигляд: |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(J + J0 )ψ + M = 0 , |
(11) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
де J , J0 - |
моменти інерції досліджуваної |
ланки та |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
диска відповідно. |
|
|
|
||
|
|
R |
ψ |
B/ |
1 |
|
|
|
Позначимо вагу диска та досліджуваної ланки |
|||||||||||
|
|
|
|
|
через m1 g . |
Тоді при вертикальному положенні ниток |
||||||||||||||
|
|
|
2 B |
P |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(при R1=R2) натяг кожної нитки дорівнюватиме |
m1 g |
. |
||
|
Рис.11 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|||||
|
|
|
|
|
|
|
ϕ |
|
|
|
|
|
|
При повороті диска на малий кут ψ нитки приймуть |
||||||
|
|
|
|
|
m1g/3 |
|
|
|
|
|
|
|
|
|
нахилене положення. Нитка АВ займе положення АВ/. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дотична до траєкторії точки В складова вертикальної |
||||
18

сили |
m1 g |
|
дорівнює |
P = |
m1 g |
sinϕ , |
а момент цієї сили відносно центральної |
|||
3 |
|
|
||||||||
|
|
|
m1 g |
|
3 |
|
|
|||
вертикальної осі |
|
R2 sinϕ, де R2 – відстань від центральної вертикальної осі до |
||||||||
|
||||||||||
|
|
|
3 |
|
|
|
|
|
||
нижніх точок підвісу диска. Загальний відновлюючий момент M = m1 gR2 sinϕ . |
||||||||||
|
При |
відхиленні нитки на кут φ диск повертається на кут ψ, причому |
||||||||
R2ψ = lϕ . |
Підставляючи отримані |
значення в диференціальне рівняння (11), |
||||||||
дістаємо період коливань системи:
T = 2π |
l(J |
+ J |
0 |
) |
, звідки |
J + J |
|
= |
T 2 m gR2 |
||||||
|
|
|
|
0 |
1 1 2 |
|
|||||||||
m gR |
2 |
|
4π 2l |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Момент інерції диска визначаємо з експерименту, |
|||||||||||||||
досліджуваної ланки. Остаточно, |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
J = |
gR |
(m T 2 |
−m T |
2 ). |
|
|
||||||||
|
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
4π 2l |
1 |
1 |
|
0 |
0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Величини з індексом «0» обчислені для диска без ланки.
(12)
виконаного без
(13)
Послідовність виконання роботи.
1.Визначити масу досліджуваної ланки в кг.
2.Знайти положення центра мас за допомогою призми, виска та методом реакцій.
3.Заміряти відстань між осями підвісу О1 , О2 - l (м) для обчислення моменту
інерції ланки методом фізичного маятника. 4. Заповнити таблицю 3 спостережень.
|
|
|
Таблиця 3 |
№ експерименту |
Період коливань Т1, с |
№ експерименту |
Період коливань Т2, с |
1 |
|
1 |
|
2 |
|
2 |
|
3 |
|
3 |
Т2 (середнє) |
|
Т1 (середнє) |
|
5.Визначити координати центра мас та порівняти зі значеннями, отриманими в п.2.
6.Визначити моменти інерції ланки J1 , JC .
Контрольні запитання.
1.Мірою чого є маса ланки, момент інерції ланки?
2.Формула для обчислення моменту інерції ланки.
3.Центральний момент інерції.
4.Зв’язок між значеннями моментів інерції відносно паралельних осей.
5.Експериментальні методи знаходження центра мас.
6.Експериментальні методи визначення моменту інерції ланки.
19