

ЛабТММ_2
.pdfЛабораторна робота №6.
Експериментальне визначення параметрів евольвентних прямозубих циліндричних зубчастих коліс.
Мета роботи: ознайомлення з основними елементами та геометрією зубчастих коліс; визначення основних параметрів циліндричного прямозубого стандартного колеса з евольвентним профілем зуба.
Обладнання: евольвентні прямозубі циліндричні зубчасті колеса, нарізані з нульовим зміщенням інструментальної рейки, штангенциркуль.
Теоретичні відомості.
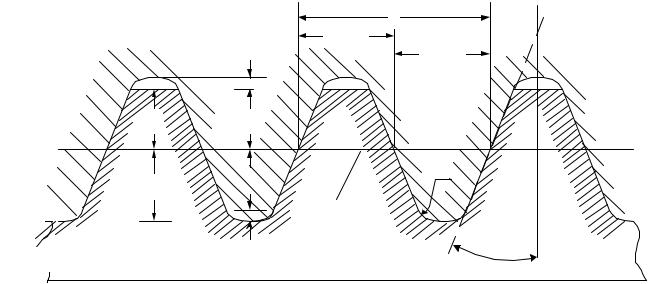
Зубчастим колесом (рис.12) називається зубчаста ланка з замкнутою системою зубів, які забезпечують неперервний рух другої зубчастої ланки. Зубчасті колеса призначені для передавання обертального руху або моментів сил з одного вала на інший з заданим передаточним відношенням кутових швидкостей, а також для перетворення обертального руху в поступальний та навпаки.
Зубчасте колесо складається з тіла зубчастого колеса 1 та зубчастого вінця. Зубчастий вінець складається із зубів 2 та западин 3. Зуб, в свою чергу, поділяють на
|
|
3 |
|
2 |
|
|
|
|
|
|
|
7 |
|
p |
s |
e |
|
5 |
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
6 |
|
|
|
|
df |
ψ |
|
|
h |
d |
4 |
|
ρf |
ha |
|
b |
|
|
|
|
|
d |
|
|
|
|
hf |
|
|
|
|
|
|
da |
|
|
|
|
|
|
|
|
|
|
1 |
Рис.12
ніжку та головку. Циліндрична поверхня, що відокремлює зуби від тіла зубчастого колеса, називається поверхнею западин 4. Поверхня, що обмежує зуби з протилежного від тіла зубчастого колеса боку, називається поверхнею вершин 5. Частина поверхні западин, що належить зубу, носить назву основи зуба 6, а частина поверхні вершин, що належить зубу, називається вершиною зубу 7. Враховуючи, що зубчасті передачі циліндричними колесами – плоскі, всі їх геометричні параметри можна розглядати в торцевому перерізі, перпендикулярному до осі колеса, як це зроблено на рис.12. Тому розглядають замість поверхні западин – коло западин, замість поверхні вершин – коло вершин, тощо. Коло, яке поділяє зуб на ніжку та головку зуба, називається ділильним.
До основних параметрів циліндричного прямозубого колеса належать :
•кількість зубів z;
20
•модуль m;
•кут вихідного контура інструмента для нарізання зубів α ;
•діаметр ділильного кoла d;
•діаметр кола вершин da;
•даіметр кола западин df ;
•діаметр основного кола db ;
•крок зубів по ділильному колу p ;
•товщина зуба s;
•висота зуба h;
•ширина западини по ділильному колу e;
•висота ніжки зуба hf ;
•висота головки зуба ha.
Коловим кроком зубчастого зачеплення p називають відстань між однойменними
точками профілів двох сусідніх зубів: p =π d  z , де d - діаметр кола, по якому виміряний
z , де d - діаметр кола, по якому виміряний
крок; z - число зубів колеса. Значення кроку залежить від діаметра кола, на якому його виміряють, а тому, щоб відрізнити значення кроку на різних колах, вказують нижній індекс ( а- для кола вершин зуба, f- для кола западин зуба. Для ділильного кола літерний індекс не ставиться).
Модулем зубчастого колеса m називається відношення колового кроку до числа π: m = p π . Модуль вимірюється в міліметрах і є величиною стандартною. Його вибирають
π . Модуль вимірюється в міліметрах і є величиною стандартною. Його вибирають
з ряду раціональних чисел від 0,05 до 100 (див. табл.4). Значення модуля, як і значення кроку, залежить від діаметра кола, до якого він відноситься. Стандартне значення модуля визначається для ділильного кола. Отже, можна сказати, що ділильним називається коло, діаметр якого визначають добутком модуля на число його зубів.
Висота ділильної ніжки визначається за формулою: h f = r −rf . Висота ділильної головки - ha = ra −r , повна висота зуба - h = h f + ha = ra − rf , де r – відповідні радіуси.
Для забезпечення сприятливих умов стандартизації і виготовлення зубчастих коліс за вихідний контур евольвентних циліндричних зубчастих коліс приймають вихідний
Вихідний твірний контур |
|
p |
|
|
|
|
c*m |
s=0,5p |
|
e=0,5p |
|
|
|
|
ha |
ha*m |
|
h |
ha*m |
ρf |
f |
|
|
|
|
Ділильна |
|
|
пряма |
Теоретичний вихідний контур |
c*m |
α |
|
Рис.13
контур зубчастої рейки (рис.13). Зубчаста рейка – це сектор циліндричного зубчастого колеса, ділильний радіус якого є нескінчено великим, в результаті чого ділильне коло, кола вершин і западин є паралельними прямими. Теоретичним вихідним контуром називають рейковий профіль, який покладено в основу стандарту. Це прямобічний
21
рейковий контур із рівномірно розташованими симетричними зубами трапецієподібної форми; перехід від профілю зуба до лінії западин викреслений дугою кола. За базу для визначення елементів зубів та їх розмірів вибирають ділильну пряму, яка перпендикулярна до осей симетрії зубів рейки. Товщина зуба на ній дорівнює ширині
западини (s=e=p/2). Висота ділильної головки зуба вихідного контуру ha = ha*m , ділильна ніжка зуба hf = h*f m вища від головки на величину c = c* m - радіальний зазор. Кут α між
бічною стороною та віссю зуба називається кутом профілю вихідного контуру. ГОСТ 13755-68 регламентує параметри вихідного контуру:
-коефіцієнт висоти головки зуба ha* =1 ;
-коефіцієнт радіального зазору c* = 0,25 ;
-кут α = 200 .
При цьому висота |
зуба |
h = h + h |
f |
= (2h* +c* )m = 2,25m . |
Прямолінійний |
профіль |
|
|
|
a |
|
a |
|
|
|
вихідного контуру |
плавно |
спряжений |
з лінією його |
западин дугою |
радіуса |
||
ρf = ρ*f m = 0,384m , де ρ*f - коефіцієнт радіуса перехідної кривої. |
|
||||||
Геометричні параметри різального інструмента визначаються вихідним твірним (виробничим) контуром – це є контур зубів рейки, який ніби заповнює западини теоретичного вихідного профілю. При цьому між лінією западин твірного контуру й
лінією вершин вихідного зберігається радіальний зазор c = c* m для того, щоб поверхня западин різального інструмента не брала участі в процесі різання. У межах цього зазору зберігається перехід по дузі кола від профілю зуба до лінії западин.
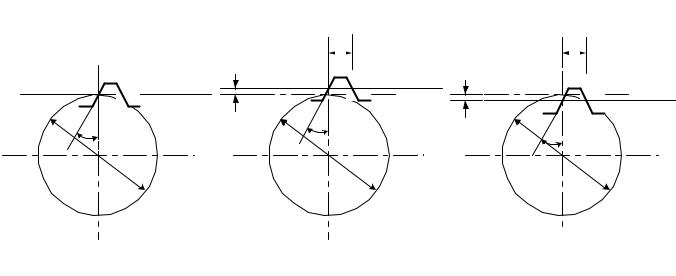
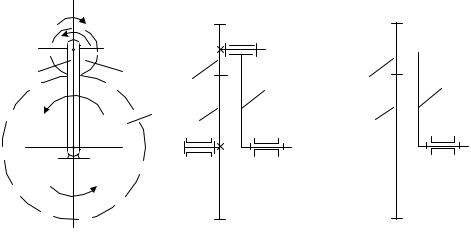
В залежності від розташування робочого контуру по відношенню до заготовки (рис.14) можна нарізати 3 різних варіанти зубчастих коліс: нульове, додатне і від’ємне. Нульові зубчасті колеса отримують тоді, коли при нарізанні ділильна пряма ОС перекочується по ділильному колу (рис.14,а). При нарізанні додатних коліс (рис.14,б)
х=0
 s
s
H
α P
|
|
х>0 |
|
|
|
mx |
s |
|
mx |
|
|
|
||
C |
C |
|
C |
|
|
H |
|||
|
|
|
||
H |
H |
P |
H |
C |
|
|
α |
|
х<0 |
|
s |
|
|
H |
P |
C |
α |
|
mz |
mz |
mz |
а) |
б) |
в) |
|
Рис.14
пряма ОС зміщена від центра, а при нарізанні від’ємних (рис.14,в) – до центра заготовки на величину тх, де х – коефіцієнт зміщення.
Послідовність виконання роботи.
1.Підрахувати кількість зубів z.
2.Заміряти штангенциркулем діаметр da кола вершин. Якщо кількість зубів парна, то da заміряють безпосередньо (рис.15,а). Якщо кількість зубів непарна (рис.15,б), то
22
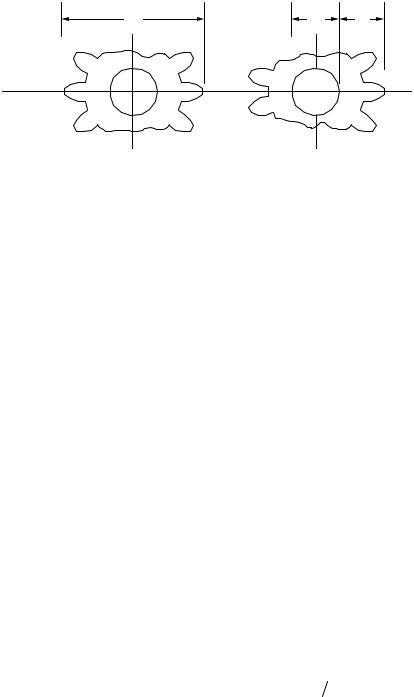
штангенциркулем заміряють розміри d0, Н, а діаметр кола вершин визначають за
формулою da = d0 + 2H . |
|
|
da |
d0 |
H |
а) б)
Рис.15
3.Визначити модуль зубчастого колеса за формулою m = da  (z + 2ha* ). Заокруглити до стандартного значення у відповідності до таблиці 4.
(z + 2ha* ). Заокруглити до стандартного значення у відповідності до таблиці 4.
Таблиця 4
|
І ряд |
|
0,8 |
1,0 |
|
1,25 |
2,0 |
2,5 |
|
3,0 |
|
4,0 |
|
5,0 |
|
6,0 |
|
8,0 |
10,0 |
|
12.0 |
|
|
ІІ ряд |
|
0.9 |
1,125 |
|
1,375 |
1,75 |
2,25 |
|
2,75 |
|
3,5 |
|
4,5 |
|
5,5 |
|
7,0 |
9,0 |
|
11,0 |
|
|
4. Порахувати параметри зубчастого колеса у відповідності до таблиці 5. |
Таблиця 5 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Назва параметра |
|
Позначення та формули |
|
|
Результати |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
розрахунку |
|
|
||
Діаметр ділильного кола, мм |
|
|
|
|
d = mz |
|
|
|
|
|
|
|
|
|
||||||||
Діаметр кола вершин, мм |
|
|
|
da = m (z + 2ha* ) |
|
|
|
|
|
|
|
|||||||||||
Діаметр основного кола, мм |
|
|
|
db |
= d cosα |
|
|
|
|
|
|
|
||||||||||
Діаметр кола западин, мм |
|
|
|
d f = m (z −2h*f ) |
|
|
|
|
|
|
|
|||||||||||
Крок по ділильному колу, мм |
|
|
|
p = π m |
|
|
|
|
|
|
|
|
|
|||||||||
Товщина зуба по ділильному колу, мм |
|
|
s = 0,5π m |
|
|
|
|
|
|
|
|
|
||||||||||
Ширина |
|
западини по |
ділильному |
|
|
e = 0,5π m |
|
|
|
|
|
|
|
|
|
|||||||
колу, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Висота ніжки зуба, мм |
|
|
|
|
hf = mh*f |
|
|
|
|
|
|
|
|
|
||||||||
Висота головки зуба, мм |
|
|
|
|
ha = mha* |
|
|
|
|
|
|
|
|
|
||||||||
Висота зуба, мм |
|
|
|
|
|
h = ha |
+ h f = 2,25m |
|
|
|
|
|
|
|
||||||||
Радіус кривизни перехідної кривої, |
|
ρf = ρ*f m = 0,384m |
|
|
|
|
|
|
|
|||||||||||||
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кутовий крок, рад |
|
|
|
|
ψ = 2π z |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. Накреслити в масштабі 3 зуби зубчастого колеса і вказати всі його розміри.
Контрольні запитання.
1.Що називається зубчастим колесом, зубчастою рейкою?
2.З чого складається зубчасте колесо?
3.Основні параметри циліндричного прямозубого колеса.
4.Теоретичний вихідний профіль. Параметри вихідного профіля.
5.Вихідний твірний контур. Його параметри.
6.Нульові, додатні та від’ємні зубчасті колеса.
23
Лабораторна робота №7.
Кінематичний аналіз зубчастих механізмів.
Мета роботи: ознайомлення зі структурою зубчастих механізмів та методами їхнього кінематичного аналізу.
Обладнання: зубчасті механізми.
Теоретичні відомості.
Передачами у машинах називають пристрої, які служать для передачі або перетворення механічного руху. У загальному випадку передачі можуть виконувати цілий ряд функцій:
•розподіляти енергію між механізмами;
•знижувати або підвищувати швидкості ланок;
•перетворювати рух (обертовий у поступальний або навпаки);
•регулювати швидкість;
•здійснювати пуск, зупинку та реверсування машини;
•захищати деталі машин від перевантаження.
Використання передач зумовлено, переважно, різницею швидкостей виконавчих (робочих) органів машини і приводних двигунів.
Зубчастою передачею називають триланковий механізм, в якому два рухомі зубчасті колеса (або рухоме колесо та рейка) утворюють з нерухомою ланкою обертову (або обертову і поступальну) пару, а між собою – вищу пару. Механізми, до складу яких входять більше, ніж три ланки, називають складними або багатоланковими зубчастими
механізмами (передачами).
Зубчасті механізми можуть бути плоскими та просторовими. У плоских механізмів ланки обертаються відносно паралельних осей. Просторові механізми використовують для передачі обертового руху між осями, що перетинаються або схрещуються.
Крім того, зубчасті механізми поділяють на механізми з нерухомими та рухомими осями обертання. Механізми першого виду називаються рядами зубчастих коліс з нерухомими осями. Вони бувають ступінчастими і з паразитними колесами. Механізми другого виду називаються епіциклічними рядами зубчастих коліс. Якщо у них рухомість W=1, то вони називаються планетарними, а якщо W ≥ 2 , то диференціальними.
Кінематичний аналіз зубчастих механізмів полягає у визначенні кутових швидкостей вхідних та проміжних ланок за відомими кутовими швидкостями вхідних ланок.
Зубчасті механізми з нерухомими осями. Для виконанняч кінематичного аналізу необхідно визначити передаточне відношення зубчастої передачі. Передаточним
відношенням і12 називається відношення кутової швидкості вхідного зубчастого колеса 1
до кутової швидкості вихідного зубчастого колеса 2: |
i |
= |
ω1 |
. У плоских механізмів |
|
12 |
|
ω |
|
|
|
|
2 |
|
передаточне відношення додатне, якщо зубчасті колеса обертаються в одному напрямі, та від’ємне, якщо колеса обертаються в різні сторони. Відношення кількості зубів більшого
зубчастого колеса z2 до кількості зубів меншого колеса z1 називається передаточним числом u12 = z2  z1 і йому знак не присвоюється.
z1 і йому знак не присвоюється.
Передаточне відношення для пари циліндричних зубчастих коліс зовнішнього
зачеплення (рис.16,а) рахується як |
i |
= |
ω1 |
= |
n1 |
= − |
rw2 |
= − |
z2 |
, для внутрішнього |
||
ω |
|
|
r |
z |
||||||||
|
12 |
|
2 |
|
n |
2 |
|
|
|
|||
|
|
|
|
|
|
|
w1 |
1 |
|
|||
24
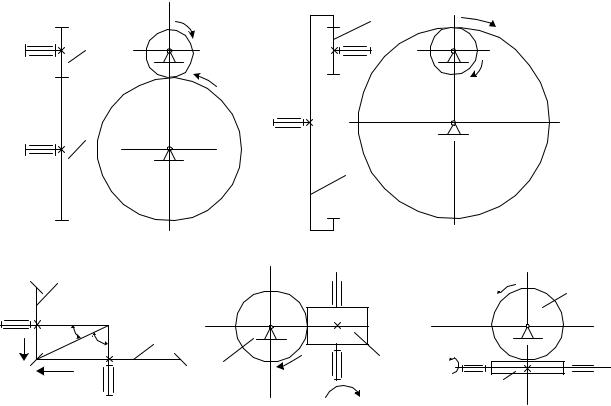
зачеплення (рис.16,б): |
i |
= |
ω1 |
= |
n1 |
= |
rw2 |
= |
z2 |
. В наведених формулах z – число зубів |
||
ω |
|
|
r |
z |
||||||||
|
12 |
|
2 |
|
n |
2 |
|
|
|
|||
|
|
|
|
|
|
|
w1 |
1 |
|
|||
відповідних коліс, rw - радіус початкового кола.
1 |
ω1 |
|
ω2 |
2
1 |
ω2 |
|
|
|
ω1 |
2
|
|
а) |
|
|
б) |
|
1 |
|
|
|
|
ω2 |
2 |
δw1 |
δ |
2 |
|
|
|
|
|
w2 |
|
2 |
ω1 |
|
|
|
|
1 |
ω |
|
||
|
|
|
1 |
|
1 |
|
|
|
|
|
ω2 |
|
|
в) |
|
|
|
|
д) |
|
|
|
|
г) |
|
Рис .16
Конічні зубчасті колеса (рис.16,в) використовують для передачі обертального руху між осями, що перетинаються. Передаточне відношення цих механізмів:
i |
= |
ω1 |
= |
n1 |
= |
sin δw2 |
= |
rw2 |
= |
z2 |
. На кінематичній схемі напрям обертання зубчастих |
|||
ω |
|
|
|
r |
z |
|||||||||
12 |
|
2 |
|
n |
2 |
|
sin δ |
w1 |
|
|
|
|||
|
|
|
|
|
|
|
|
w1 |
1 |
|
||||
коліс можна показати стрілками.
Гіперболоїдні зубчасті механізми використовують для передачі обертового руху між перехресними осями. Якщо початкові поверхні коліс – круглі циліндри, то передача називається гвинтовою (рис.16,г). Передаточне відношення гвинтової передачі
i |
= |
ω1 |
= |
n1 |
= |
rw2 cos βw2 |
= |
z2 |
, де β |
w1 |
, β |
w2 |
- кути нахилу гвинтових ліній на початкових |
||||
ω |
|
|
|
z |
|||||||||||||
12 |
|
2 |
|
n |
2 |
|
r |
cos β |
w1 |
|
|
|
|
||||
|
|
|
|
|
|
w1 |
|
1 |
|
|
|
|
|
||||
циліндрах.
Черв’ячна передача (рис.16,д) є частковим випадком гіперболоїдної. Кут схрещування осей переважно складає 900. Черв’яком називається косозубе зубчасте колесо, лінія зубів якого робить один оберт або більше навколо його осі. Число зубів z1 черв’яка називють числом заходів гвинтової лінії. Передаточне відношення черв’ячної
передачі |
i |
= |
ω1 |
= |
n1 |
= |
z2 |
. Напрямок обертання черв’ячного колеса залежить від |
||
ω |
|
|
z |
|||||||
|
12 |
|
2 |
|
n |
2 |
|
|
||
|
|
|
|
|
|
1 |
|
|||
напряму обертання черв’яка та гвинтової лінії.
Передаточне відношення складної багатоланкової зубчастої передачі дорівнює добутку взятих із своїми знаками передаточних відношень окремих її ступенів:
25
i |
= |
ω1 |
= i i |
2′3 |
i |
3′4 |
... i |
(n−1)′n |
= (−1)m |
|
z2 z3 ... zn |
|
|
|||||
|
|
z |
|
z |
|
′ ... z |
|
|
|
|||||||||
1n |
|
ω |
2 |
12 |
|
|
|
1 |
2 |
(n−1) |
′ |
(14) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Колесам, які жорстко сидять на одному валу, відповідають величини з однаковими індексами: 2 і 2/, 3 і 3/ , тощо. Число т дорівнює числу пар зовнішнього зубчастого зачеплення. Тут враховано, що внутрішнє зачеплення не змінює напрямку обертання коліс.
Під час передачі руху між валами, які знаходяться на великих відстанях один від одного, або при необхідності утворення передаточного відношення певного знаку використовують рядове сполучення коліс, яке складається з ряду послідовно з’єднаних коліс, кожне з яких має свою вісь обертання. Загальне передаточне відношення такого ряду коліс не залежить від розмірів проміжних коліс, які називаються в такому випадку
паразитними.
Зубчасті механізми з рухомими осями коліс. Для таких механізмів колеса з рухомими осями обертання називаються планетарними колесами або сателітами, а ланка, на якій розміщена вісь сателіта, - водилом. На схемах водило прийнято позначати Н. Зубчасті колеса з нерухомими осями обертання називаються сонячними або
центральними.
ω2 |
−ωH |
|
|
|
|
O2 |
|
|
O2 |
|
|
|
|
|
|
||
H |
|
2 |
|
2 |
H |
|
|
|
|
||
|
|
|
|
|
|
ωH |
|
|
1 |
1 |
OH |
|
|
|
|||
O1 |
|
|
|
O1 |
|
O |
|
|
|
|
|
|
H |
|
|
|
|
|
ω1 |
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
Рис.17 |
|
O2
2 H
1
O1 OH
б)
Для диференціального механізму, зображеного на рис.17,а, n=3, p5=3, p4=1, отже, за формулою Чебишева W=2 і для визначеності руху механізму треба мати 2 узагальнені координати.
Для отримання залежності між кутовими швидкостями ланок диференціального механізму та числом зубців зубчастих коліс використовується метод оберненого руху. При цьому всім ланкам механізму надається додаткова кутова швидкість навколо осі ОН (−ωH ), яка дорівнює за величиною, але протилежна кутовій швидкості водила Н. При
цьому відносний рух ланок не змінюється, а кутова швидкість водила стає рівною нулю.
Тоді i( H ) = |
ω1 |
−ωH |
= − |
z2 |
. Індекс в дужках позначає ту ланку, яка прийнята за нерухому. |
||
ω |
|
−ω |
|
z |
|||
12 |
2 |
H |
|
|
|||
|
|
|
1 |
|
|||
У загальному вигляді при будь-якому числі коліс формула Вілліса записується так:
i( H ) = |
ω1 |
−ωH |
= |
z2 z3 ... zn |
|
(−1)m , |
(15) |
|||||
|
|
|
|
z |
z |
′ ... z |
|
|
||||
12 |
ω |
2 |
−ω |
H |
|
(n−1) |
′ |
|
||||
|
|
|
|
1 |
2 |
|
|
|
|
|||
де т – число пар зовнішнього зубчастого зачеплення.
Диференціальний зубчастий механізм виконує додавання кутових швидкостей від двох джерел руху (при W=2) або розкладає швидкість, яка передається від одної вхідної на
26
дві вихідні ланки. Для визначення кутових швидкостей та переміщень використовують
формулу: i12( H ) = ω1 −ωH |
= ϕ1 −ϕH , де φі – кути повороту ланок. |
|
|||||||||||||
ω |
2 |
−ω |
H |
ϕ |
2 |
−ϕ |
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Планетарні механізми (рис.17,б) є окремим випадком диференціальних механізмів. |
|||||||||||||||
Якщо в диференціальному механізмі (рис.17,а) одне з центральних коліс зробити |
|||||||||||||||
нерухомим, одержимо планетарний механізм з W=1. Формула Вілліса набуває вигляду: |
|||||||||||||||
|
|
|
|
|
|
i( H ) = |
|
−ωH |
|
= − |
z2 |
. |
(16) |
||
|
|
|
|
|
|
ω |
|
−ω |
|
|
|||||
|
|
|
|
|
|
|
12 |
2 |
H |
|
z |
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
Для планетарних механізмів з круглими колесами сума передаточних відношень |
|||||||||||||||
при різних зупинених ланках завжди дорівнює одиниці: i2(1H) +i21( H ) =1 . |
(17) |
||||||||||||||
Послідовність виконання роботи.
1.Використовуючи модель, скласти кінематичну схему зубчастого механізму. Визначити степінь рухомості за формулою Чебишева.
2.Порахувати кількість зубів зубчастих коліс.
3.Скласти формулу для визначення передаточного відношення від вхідної до вихідної ланки та обчислити його значення.
4.Перевірити передаточне відношення, використовуючи модель механізму. Для цього повернути вхідну ланку на кут ϕ1 та виміряти кут повороту ϕі вихідної ланки, після чого обчислити передаточне відношення за формулою і1і =ϕ1  ϕі . Передаточне відношення можна також визначити, підрахувавши кількість обертів ведучого колеса, яке відповідає одному оберту веденого колеса.
ϕі . Передаточне відношення можна також визначити, підрахувавши кількість обертів ведучого колеса, яке відповідає одному оберту веденого колеса.
5.Виконати попередні пункти для складних механізмів з нерухомими осями, а також для планетарних і диференціальних механізмів.
6.Для планетарних механізмів визначити передаточне відношення від ведучої ланки до сателіта.
Контрольні запитання.
1.Що називається передачею? Для чого передачі використовуються?
2.Що таке зубчаста передача?
3.Класифікація зубчастих механізмів.
4.Що називається передаточним відношенням?
5.Які передачі називають ступінчастими і паразитними? Чи залежить величина передаточного відношення від числа зубів паразитного колеса?
6.Як визначити знак передаточного відношення в циліндричних, конічних та черв’ячних передачах? В яких випадках не говорять про знак передаточного відношення?
7.Які механізми називають диференціальними та планетарними?
8.Які колеса називаються сонячними, сателітами?
9.Формула Вілліса.
10.Як визначається передаточне відношення планетарної передачі від водила до центрального колеса?
11.Як визначається передаточне відношення планетарної передачі від центрального колеса до водила?
12.Як визначається передаточне відношення від центрального колеса до сателіта в планетарній передачі?
13.Як зв’язані кутові швидкості ланок у диференціальному механізмі?
27