

лр5-5
.docxЛабораторна робота
ДОСЛІДЖЕННЯ АСР З РІЗНИМИ ТИПАМИ ЛІНІЙНИХ РЕГУЛЯТОРІВ
Мета роботи: вивчити різні типи лінійних регуляторів та зробити порівняльний аналіз їх застосування в АСР.
Дослідити розімкнену АСР з П-регулятором за умови зміни завдання та дії збурень за різними каналами. Дослідити замкнену АСР з різними типами регуляторів за умови дії на об’єкт збурень.
Об’єкт заданий у вигляді структурної схеми:
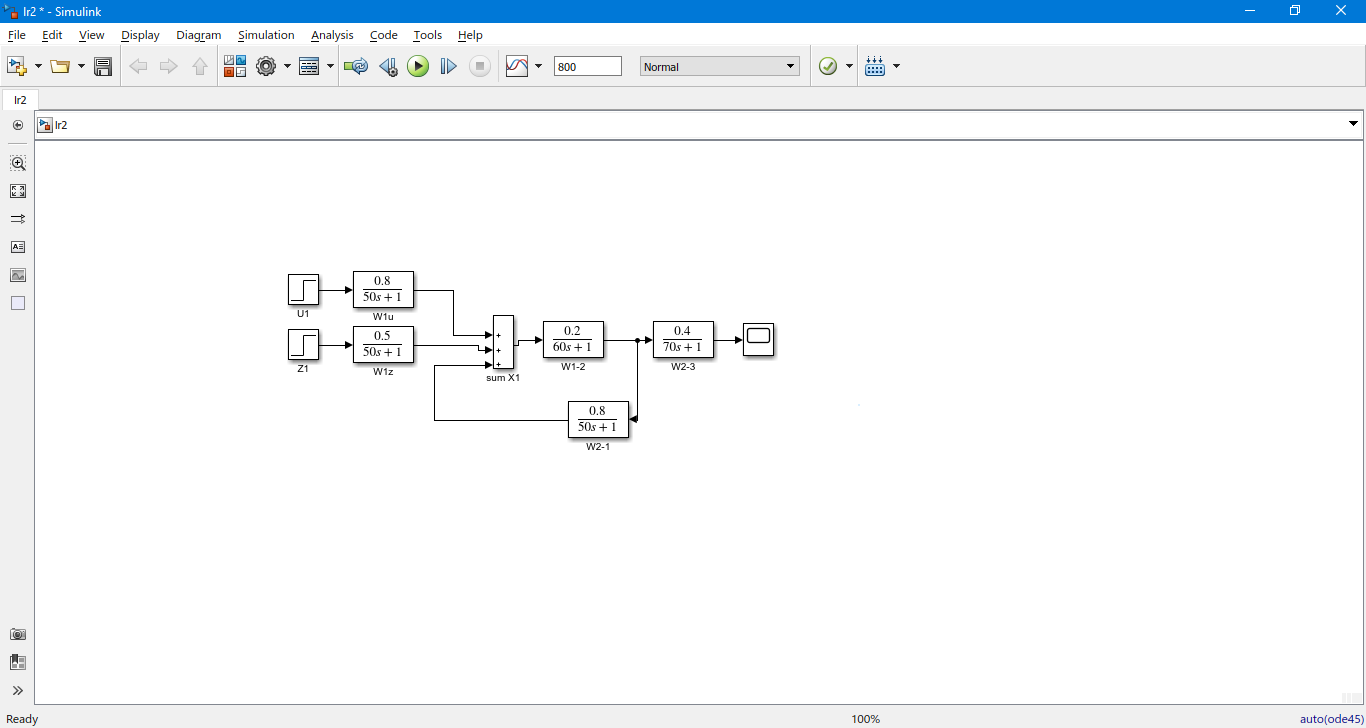
Рисунок 1 – Структурна схема об'єкта керування
Еквівалентні передаточні функції
WZ(p)=
WU(p
)=
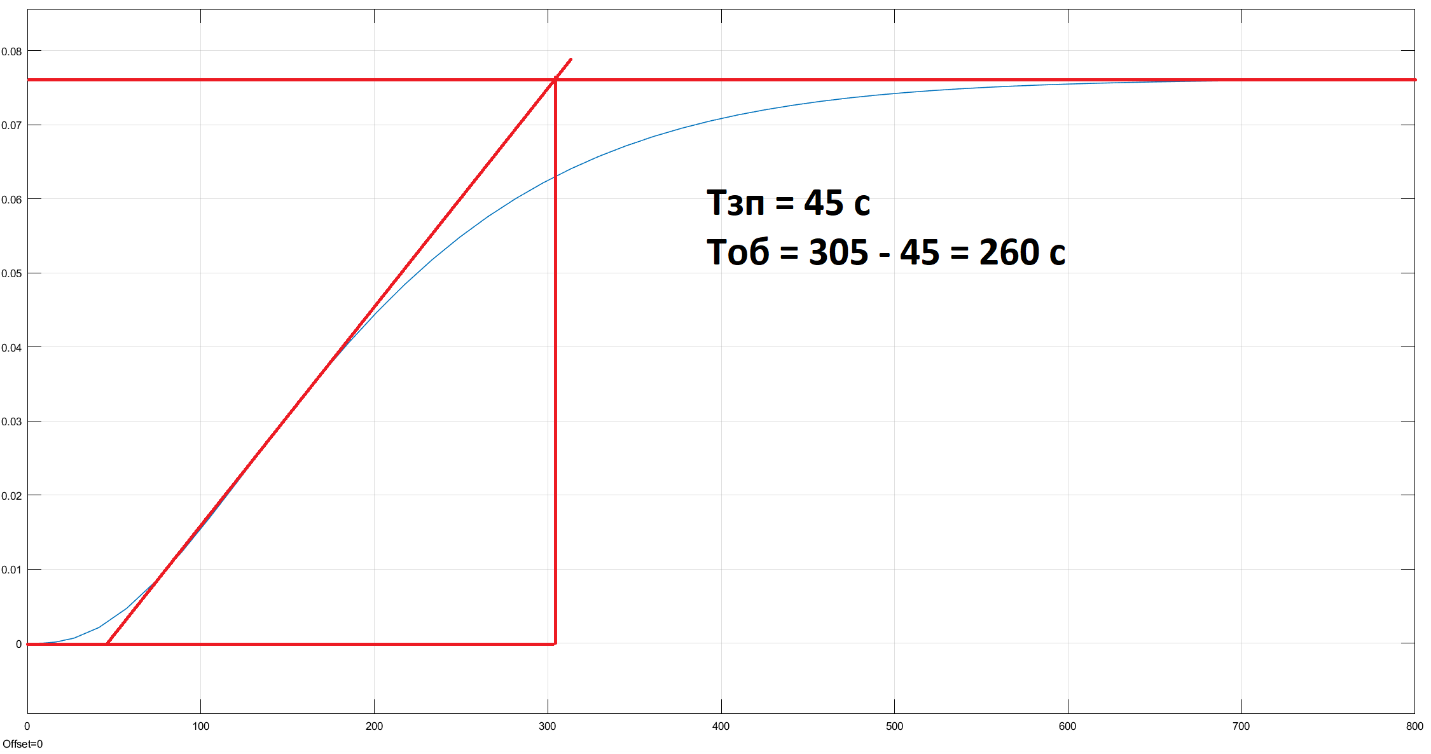
Рисунок 2 – Визначення сталої часу Т , часу запізнення τ зп для U1
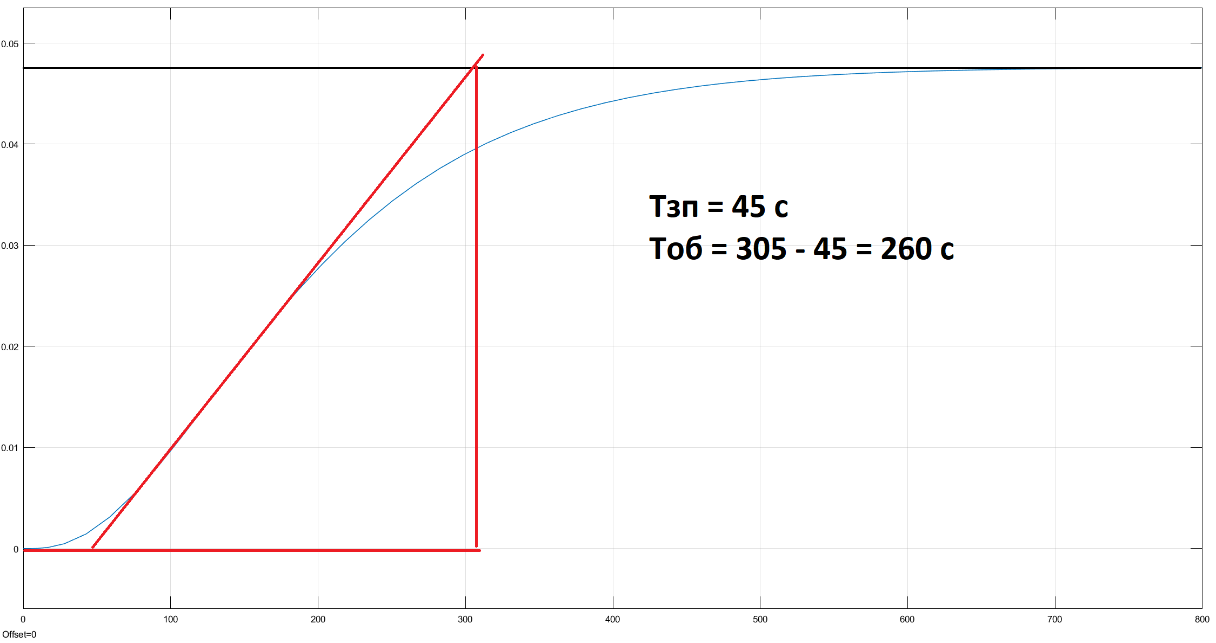
Рисунок 3 – Визначення сталої часу Т , часу запізнення τ зп для Z
2. Дослідження розімкненої АСР з П-регулятором
Створюємо розімкнену АСР, для чого додаємо в канал управління ланку, що імітує ПІД регулятор. Для цього використовуємо ланку PID controller, яка знаходиться в Simulink Library Browser\ Simulink Extras\Additional Linear\ PID controller, в якому є три параметри настроювання (рис. 1) Рroportional (пропорційний), Integral (інтегральний) та Derivative (диференціальний).
2.1. Дослідити перехідний процес в системі з П-регулятором за дії першого збурення (для цього встановлюємо xзад = 0, z1 = 10, z2 = 0), підібравши параметр настроювання регулятора (Рroportional) K p таким чином, щоб вигляд перехідного процесу був найкрашим. При цьому Integral і Derivative складові регулятора прирівняти до нуля ( ki = 0, kд = 0 ). Отриманий перехідний процес накреслити в протоколі. Записати вираз Wроз (р) роз з отриманим коефіцієнтом передачі регулятора. Збільшити й зменшити величину K p . Отримані графіки занести до протоколу. Проаналізувати вплив настроювання регулятора на вигляд перехідного процесу.
Значення Кр =1.
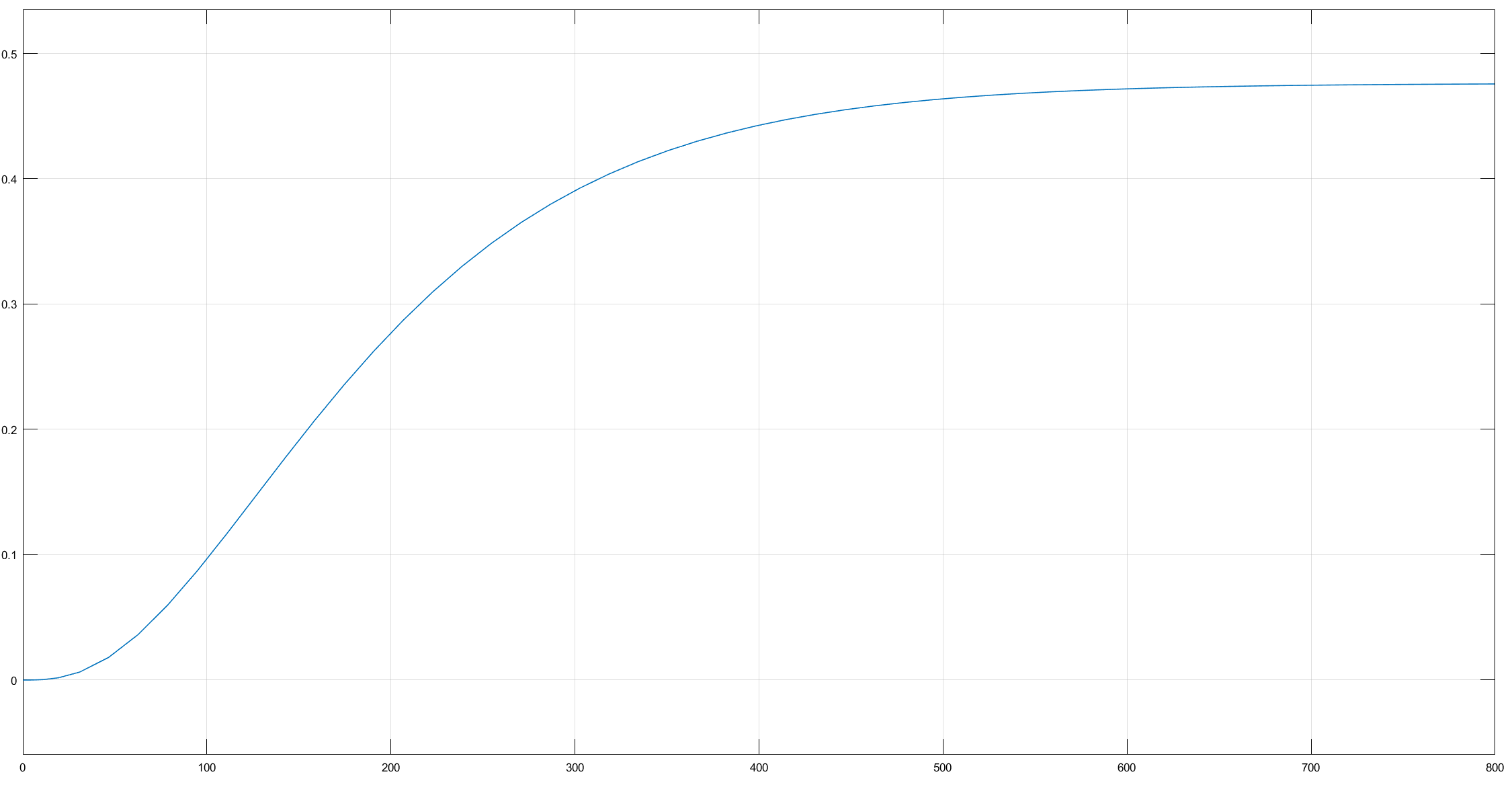
Рисунок 4 – Перехідний процес з П-регулятором
Висновок: зміна значень П-регулятора не вплинула на перехідний процес.
3. Дослідження замкненої АСР з П-регулятором
3.1. Перетворити розімкнену АСР на замкнену, для чого ввести зворотний зв’язок за каналом управління. Встановити xзад = 0, z1 = 10, z2 = 0 . Записати передаточну функцію отриманої замкненої системи W зам (р) з П-регулятором. Дослідити перехідний процес за дії першого збурення, підібравши параметри настроювання П-регулятора таким чином, щоб перехідний процес був найкращим. Проаналізувати вигляд отриманого перехідного процесу, занести його до протоколу, зробити висновки. 3.2. Змінити параметр настроювання регулятора (збільшити та зменшити K p ). Проаналізувати вплив величини K p на вигляд перехідного процесу, для чого накреслити отримані графіки на графіку, отриманому в п.3.1.
Значення Кр=31.4.

Рисунок 5 – Перехідний процес з П-регулятором в замкнутій системі
Розрахуємо прямі показники якості перехідного процесу
Динамічна похибка А1= 0,18-0,14=0,04
Статична похибка ∆Хст = 0,04
Час регулювання tрег = 1200 с
Перерегулювання

 –
значення входить в допустимі межі.
–
значення входить в допустимі межі.
Степінь затухання
 0,875,
0,875,
0.75
 –
значення задовольняє вимоги.
–
значення задовольняє вимоги.
Висновок: Пропорційний регулятор зменшує час усталення і похибку сталого режиму, але збільшує перерегулювання.
4. Дослідження замкненої АСР з ПІ-регулятором
4.1. Включити Integral складову, встановивши в PID controller ( ki ≠ 0). Параметри настроювання П-складової встновити з п. 3.1. Записати передаточну функцію ПІ-регулятора та передаточну функцію замкненої системи W зам ( р) з ПІ-регулятором. Дослідити перехідний процес за дії першого збурення (для цього встановлюємо xзад = 0, z1 = 10, z2 = 0), підібравши параметри настроювання І-регулятора таким чином, щоб перехідний процес був найкращим. Проаналізувати вигляд отриманого перехідного процесу, занести його до протоколу, зробити висновки. 4.2. Змінюючи параметри настройки регулятора і k , отримати різні коливальні перехідні процеси за дії першого збурення. Проаналізувати вплив величини і k на вигляд перехідного процесу, для чого накласти отримані графіки на попередній.
Значення Кр =31,4, Кі=0.25
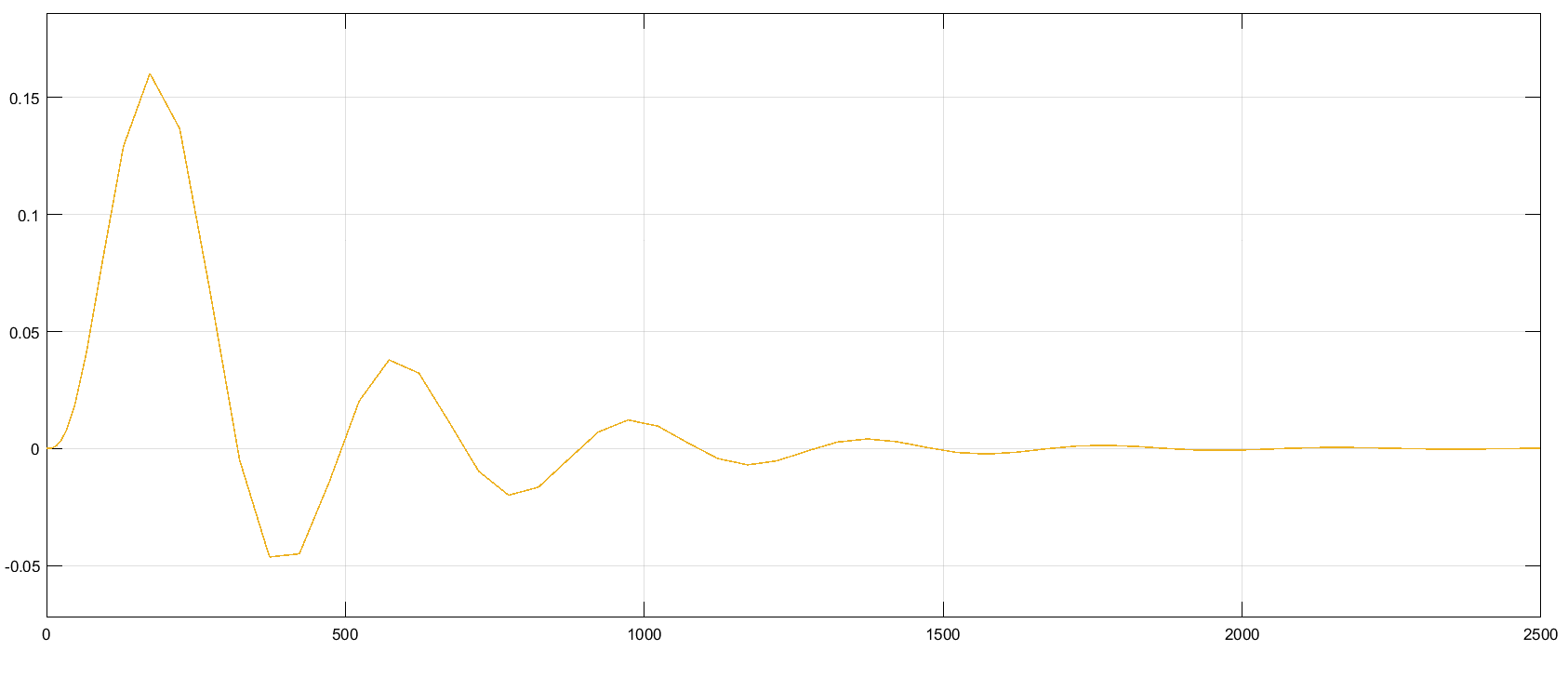 Рисунок 6 – Перехідний
процес з ПІ-регулятором в замкнутій
системі
Рисунок 6 – Перехідний
процес з ПІ-регулятором в замкнутій
системі
Розрахуємо прямі показники якості перехідного процесу
Динамічна похибка А1= 0,16
Статична похибка ∆Хст = 0
Час регулювання tрег = 2100 с
Перерегулювання

– значення входить в допустимі межі.
Степінь затухання
 0,76,
0,76,
0.75 – значення задовольняє вимоги.
Висновок: зміна значень ПІ-регулятора в замкнутій системі збільшила час вирівнювання перехідного процесу, але має менше перерегулювання і ступінь затухання.
5. Дослідження замкненої АСР з ПІД-регулятором
5.1. Включити Derivative складову, встановивши в PID controller ( kд ≠ 0). Параметри настроювання ПІ-складової встновити з п. 4.1. Записати передаточну функцію ПІД-регулятора та передаточну функцію замкненої системи W ( р) зам з ПІД-регулятором (зворотний зв’язок від’ємний). Дослідити створену АСР за дії першого збурення (для цього встановлюємо xзад = 0, z1 = 10, z2 = 0), причому змінювати параметри Д- складової таким чином, щоб отримати найкращий перехідний процес. Порівняти отримані характеристики перехідного процесу з раніше визначеними в п.4.1.
Значення ПІ-регулятора Кр = 30.12, Кі= 0.213, Кд= 1330.93.

Рисунок 7 – Перехідний процес з ПІД-регулятором в замкнутій системі
Розрахуємо прямі показники якості перехідного процесу
Динамічна похибка А1= 0,165
Статична похибка ∆Хст = 0
Час регулювання tрег =1700 с
Перерегулювання

– значення входить в допустимі межі.
Степінь затухання
 0,78,
0,78,
0.75 – значення задовольняє вимоги.
Висновок: вивчили різні типи лінійних регуляторів і найкращим виявився ПІД-регулятор поєднує в собі переваги всіх регуляторів і має найкращу якість регулювання.