

vhMX313VgM
.pdfВ природе все процессы аналоговые. Их дискретизация, как и создание численных моделей, объясняется несовершенством техники и аппаратуре моделирования 20-го века (подверженность помехам, температурной нестабильности элементов и пр). При современной элементной базе, многие исследователи и производственные фирмы понимают перспективность аналоговой техники.
Если принять допущение о бесконечно большом входном и нулевом выходном сопротивлениях ОУ, то в математическом понимании вес (масса) выходного узла равен (равна) 1.
Если i-й узел соответствует прямому входу ОУ, а j-й – его выходу, на пересечении j-й строки и i-го столбца записывается K – собственный коэффициент усиления ОУ), а если i-й узел – инвертирующий вход, записывается K. На рис. 5.4 изображена схема ОУ с обратными связями (а) и ее граф (б).
|
|
|
R2 |
|
|
e– |
|
Вход |
R1 |
|
|
Uвх g1 |
1 |
g2 |
|
|
|
|
K |
Выход |
–K |
3 |
|
|
|
|
g3 |
||||
|
|
|
|
|
K |
g4 |
|
|
R3 |
|
|
|
2 |
|
|
|
|
|
|
e+ |
|
||
|
|
|
|
|
|
||
|
|
a |
R4 |
|
б |
|
|
|
|
|
|
|
|
||
Рис. 5.4
Если существуют параллельные пассивные цепи, они дополнительно изображаются ветвями, направленными от выхода к входам ОУ (рис. 5.4, б).
Между узлами, не являющимися парой вход-выход одного ОУ, включаются две ветви с передачами, отличающимися знаменателями (весами узлов), направленные в разные стороны.
Соответствующие матрица и вектор на рис. 5.5, 5.6.
|
|
|
|
|
№ строки |
столбца |
|
|
1 |
2 |
3 |
|
|
|
|
|
|
№ |
№ столбца |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
0 |
g2 /(g1 g2) |
|
||
|
T |
|
|
|
|
|
|
|
|
–g2/(g1 + g2) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
0 |
1 |
g44/(g3 g4) |
|
|
|
|
|
|
|
|
|
|
|
|
–g g3 + g4) |
|
|
|
|
|
|
|
3 |
|
|
K |
K |
1 |
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.5 |
|
|
|
||
21

1 g1/(g g1+ g2)g2)
G 2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
3 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Рис. 5.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C1 |
|||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Вход |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
R2 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
K |
||||||||
|
2 |
|
|
|
|
|
3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
R3 |
|
|
|
|
|
|
|
R4 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
На рис. 5.7, а приведен пример схемы звена динамической коррекции, которая включает 2 ОУ, а ее граф (рис. 5.7, б).
Матрица [A] 5-го порядка для графа по рис. 5.7, б, вектор задающих передач [B] (рис. 5.8).
|
|
|
R7 |
|
R5 |
|
4 |
|
Выход |
R6 |
C3 |
|
K |
|
|
5 |
|||
|
|
|
|
|
|
|
|
R8 |
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
Вход |
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
–K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выход |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ строки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
№ столбца |
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
a25 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
–K |
|
|
|
|
|
|
|
|
|
|
|
a34 |
0 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a43 |
|
|
|
|
|
|
a45 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
a52 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Выражения, входящие в [A] – (5.11) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
a |
|
pC1 g2 |
; a |
|
|
|
|
|
|
g4 pC2 |
|
|
|
|
|
; a |
|
|
|
|
|
|
|
|
|
g5 grc |
|
; |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
13 |
|
pC1 g2 |
g1 |
25 |
|
|
g4 pC2 g3 |
34 |
|
|
|
|
|
|
|
|
|
|
|
|
g5 grc |
pC1 |
g2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.11) |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
g5 grc |
|
|
|
|
|
|
|
|
|
|
|
|
g7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g4 pC2 |
|
|
||||||||||||||||||||||||
a |
|
|
; a |
|
|
|
|
|
|
|
|
|
|
; |
|
|
a |
|
|
|
|
|
|
|
. |
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
43 |
|
g5 grc |
g7 |
45 |
|
grc g7 g5 |
52 |
|
|
|
|
|
|
|
|
|
g4 |
pC2 g7 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
22
6. АВТОМАТИЗИРОВАННЫЙ СИНТЕЗ ЛИНЕЙНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ [8], [9]
Задача проектирования электротехнического устройства имеет бесконечное множество решений. Так, например, трансформаторы одной и той же мощности могут отличаться соотношением основных размеров, отношением масс обмоточных и ферромагнитных материалов [10], [11].
Общие положения практической оптимизации.
Класс задач, связанных с принятием оптимальных решений на основе математических методов, называется математическим программированием.
Если составляющее задачу уравнения и ограничения являются линейными, это линейное программирование, в противном случае нелинейное программирование.
Всякую задачу оптимизации можно свести к поиску экстремума (минимума или максимума функции, заданной аналитически, либо вычисляемой поэтапно).
Задача сводится к поиску, в данном случае численным методом, экстремума (минимума) целевой функции Yopt.
Значения Yopt зависят от вектора [х1,х2,..хn] входных переменных (начального плана).
Зависимость Yopt ([х]) может быть установлена математической моделью динамической системы.
Совокупность значений переменных вектора [х], соответствующая минимуму Yopt , называется оптимальным планом.
Постановка и решение задач оптимального проектирования и оптимального управления имеют особенности.
Взадачах оптимального управления оптимальный план должен быть единственным (например, совокупность сигналов управления технологическим процессом), но он может быть оперативно изменен системой управления реальным объектом, если будет зарегистрировано отклонение режима от номинального.
Взадачах проектирования решение может содержать набор оптимальных планов, т. е. совокупность проектных решений, удовлетворяющих принятому критерию. Окончательный выбор должен сделать пользователь, руководствуясь соображениями, не подвергавшимися формализации: возможностями производства, наличием элементов.
23

Чувствительность целевой функции к переменным [х] при оптимальном плане должна быть низкой: при реализации проекта всегда возможны технологические отклонения, разброс параметров элементов, и это не должно существенно влиять на технико-экономические показатели устройства или процесса.
Приведем некоторые общие рекомендации.
Целевая функция должна быть чувствительной к переменным начального плана.
Значения [х] должны принадлежать к допустимой области. Это реализуется путем введения ограничений на переменные.
Элементы Yopt не должны быть линейно связаны.
Количество m переменных [х] не должно быть меньше n переменных, входящих в Yopt.
Значения элементов начального плана должны быть по возможности близкими к значениям оптимального плана. При большой разнице и наличии нескольких минмумов процесс может завершиться нахождением локального минимума, удаленного от глобального.
Ниже приведена типичная структурная схема поискового алгоритма оптимизации (рис. 6.1).
Оптимизация параметров систем по методу деформируемого многогранника.
В методе деформируемого многогранника (Нелдера-мида) [8] симплекс может изменять форму, поэтому оптимальное решение – приспособление к особенностям многомерной поверхности.
Обозначим координаты вершин многогранника на n-м шаге (6.1):
Вход |
|
|
|
||
|
|
|
|
|
|
Формирование набора |
|
Алгоритм изменения |
|||
переменных вектора [X] |
|
|
переменных |
||
|
|
||||
|
|
|
|
|
|
Вычисление целевой |
|
Сравнение значений |
|||
функции Y (анализ) |
|
|
целевой функции |
||
|
|
|
|
|
|
Комплексный критерий |
|
|
|
||
окончания |
|
|
|
||
Выход |
|
|
|
||
Рис. 6.1
24
Xn k; k 0... |
(6.1) |
В методе определяются вершины, в которых целевая функция максимальна и минимальна, а вектор [X] обозначаетсея соответственно через [X] max (неудачный шаг) и [X] min (правильный выбор).
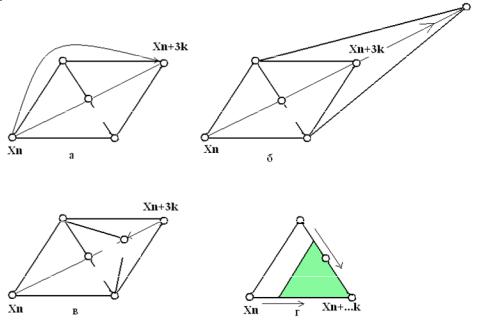
Работа метода состоит из следующих операций деформации симплекса: отражения, растяжения, сжатия и редукции (рис. 6.2).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xn + 4k |
|
|
|
|
|
|
|
|
Xn + 3k |
|
|
|
|
|
|
|
|
|
|
Xn + 3k |
|||
|
|
|
|
Xn + 2 |
k |
|
|
|
Xn + 2 |
k |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xn |
|
|
|
|
|
|
|
Xn |
|
|
|
|
|
|
|
|
|
|
|||
|
|
а |
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xn + 3k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Xn + 5k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Xn + 2k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Xn |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
Xn |
|
|
|
|
|
|
Xn + …k |
|||||||
|
|
|
в |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.2. Операции метода деформируемого многогранника
Отражение (рис. 6.2, а) – это проектирование точки Хmax через центр тяжести с получением новой точки:
Хn + 3 = X(n + 2) + a*((Хn + 2 – Xmax).
Где а > 0 — коэффициент отражения.
Растяжение (рис. 6.2, б) – Если отражение прошло успешно, т. е.
(Хn + 3) < (Xn + 2),
то продолжаем дальше растягивать симплекс (рис. 6.2, б) в соответствии с соотношением
Хn + 4 = Х.(n + 2) + c (Хn + з – Хn + 2),
где с коэффициент растяжения. Если растяжение успешно, т. е. если f(Хn + 4) < < (Xmin), то Хmax заменяется на Х(n + 4). В противном случае Хmax заменяется на X(n + 3).
Сжатие (рис. 6.2, в). Если отражение не успешно в том смысле, что f(Хn + 3) > f (Xi) для всех i – плохая, то симплекс сжимается в сторону от центра тяжести Хn + 2:
25
Хn + 5 = Х(n + 2) + b* (Xmax – Хn+2),
где 0 < b <1 – коэффициент сжатия. Хmax заменяется на Хn + 5.
Редукция (рис. 6.2, г). Если сжатие не успешно в том смысле, что f (Хn + 3) > f (Хmax), то симплекс уменьшается. Уменьшение происходит и сторону вершины с наименьшей целевой функцией Xmin Координаты вершин пересчитываются:
Хi = Хmax + d*(Хi – Хmin), i = 1,…, n + 1.
Здесь d < 1 — коэффициент редукции.
С приближением к минимуму уменьшается и многогранник. Окончание поиска может быть осуществлено по двум условиям (6.2)
|
1 |
|
i n 1 |
|
0.5 |
|
|
|
|
|
f (Xi f Xn 2 |
2 |
, |
(6.2) |
|
|
|
||||||
n 1 |
i 1 |
|
|
|
|
||
где ε – малое число, от которого зависит точность и время оптимизации. F(X) – значение целевой функции при предельном количестве шагов поиска n.
Деформируемый многогранник адаптируется к топографии целевой функции, вытягиваясь вдоль длинных наклонных плоскостей, сжимаясь в окрестности минимума.
Стратегия метода зависит от выбора коэффициентов а, b, с, d.
В следующем примере рассмотрен оптимальный синтез элементов избирательного усилителя по заданной амплитудно-частотной характеристике (АЧХ) [12].
Избирательный усилитель (ИУ) [9] применяется в различных электронных устройствах в качестве полосового фильтра, выделяющего информационный сигнал определенной частоты на уровне шумов и помех, всегда присутствующих в системах автоматического управления, в том числе для коррекции частотных характеристик САУ электросварочных установок, в акустической технике и в технике связи.
Принцип действия ИУ основан на том, что амплитудно-частотная характеристика (АЧХ) цепи, образованной элементами R2, R3, R4, C1, C2, C3 (рис. 6.3), имеет минимум на частоте, называемой частотой квазирезонанса.
Форма АЧХ зависит от значений указанных выше значений емкостей конденсаторов и сопротивлений резисторов.
Если такая цепь является цепью отрицательной обратной связи (ООС) операционного усилителя (ОУ), то общая АЧХ каскада на частоте квазирезонанса имеет максимум.
26

|
|
|
|
|
|
|
|
|
|
|
R5 |
|
|
|
С1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
R2 |
4 |
|
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
С3 |
|
|
4R |
|
ВходR1 |
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0R |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
0
Рис. 6.3
С2
R3
– DA1 2
+
Выход
Вэлектронных устройствах, в частности в системах автоматики, ИУ должен обеспечивать определенный коэффициент передачи Y1 на заданной частоте W.
Чтобы обеспечить симметрию АЧХ рекомендуется выполнить условия: C1 = C2 = 0,5C3; R2 = R3 = 2R4. Резистор R5 включен в цепь частотнонезависимой ООС и совместно с R1 служит для настройки коэффициента передачи ИУ.
Для настройки ИУ на частоту W и на коэффициент передачи Y1 необходиморассчитатьсопротивлениярезисторовR1, R2, R5, емкостьконденсатораC1.
Аналитический расчет схемы вызывает значительные трудности, поэтому для решения задачи целесообразно применить численный поисковый оптимизационный алгоритм.
Впримере использованы символьно-численный математический программный пакет MAPLE 9.5 и программа матричных операций MATLAB 7.01, реализующая поисковый алгоритм Нелдера – Мида.
Методика расчета включает три основных этапа.
Этап 1. Выбор переменных плана оптимизации: элементы (R1, R2, R5, C1) и их значения в начальном плане.
Этап 2. Составление целевой функции (ЦФ) (6.3), т. е. такого математического выражения, минимум которого удовлетворяет требованиям поставленной задачи. В рассматриваемом случае можно предположить, что, если одновременно достигается минимум разности текущих и заданных значений Y1 и W, результат является положительным.
27

Y |
SF ( f |
i |
ind)2 SF (Y |
m )2. |
(6.3) |
opt |
1 |
2 1 |
1 |
|
Здесь fi – текущее значение индекса вектора частот; ind – заданное значение номера индекса частоты например, если вектор частот W содержит
10 элементов: W = (2, 4, 6, 8, 10, 12, 14, 16, 18, 20) рад/с, то ind = 4
соответствует 8 рад/с; m1 – максимальное значение индекса частоты текущей АЧХ; SF1, SF2 – весовые коэффициенты элементов ЦФ.
Этап 3. Реализация поискового алгоритма. Cоставляются матрица частных передач G и вектор задающих передач g в операторной форме.
На рис. 6.3 номера узлов заключены в окружности. Символом g обозначены активные проводимости: gi = 1/Ri.
В результате решения матричного уравнения в программном пакете MAPLE относительно коэффициентов передачи K выбирается искомый коэффициент передачи от входного узла к выходному, имеющему № 2.
Для «идеального» ОУ полученное выражение можно упростить, приняв допущение о бесконечно больших собственном коэффициенте передачи ОУ, входном сопротивлении и малом выходнрм сопротивлении.
Остальные действия выполняются в программах в пакетах MAPLE 9.5, MATLAB 7.01.
На рис. 6.4 результирующая АЧХ и оптимизированные значения параметров схемы для ind = 300, Y = 20.
Амплитуда, (о. е.)
25
20
15
10
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
100 |
200300 |
400 |
500600 |
700800900 |
1000 |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
Номер индекса |
||
Рис. 6.4
Xopt =
7.0037e + 003
5.8906е + 003
1.0169е + 005
5.9659е – 008
28
ЗАКЛЮЧЕНИЕ
В данном учебном пособии показаны и реализованы возможности объединения символьных и численных математических преобразований, что позволяет повысить эффективность проектирования элементов электротехнических комплексов (ЭТК).
Учебное пособие может быть использовано при обучении магистрантов, а также в работе специалистов по разработке ЭТК.
На кафедре эдектротехнологической и преобазовательной техники (ЭТПТ) СПбГЭТУ «ЛЭТИ» разработан и включен в учебный процесс лабораторный практикум по данной дисциплине в объеме 108 часов.
В практикум включены примеры, тексты программ, задания для самостоятельной работы магистрантов.
29
Список литературы
1.Матросов А. В. MAPLE 9.5 СПб.: БХВ-Петербург, 2001.
2.Abel M. L., Brasselton J. Maple V by Example. Dep of Mathematics and Computer Science.: Statesboro, GA, 1994. 502 с.
3.Башарин С. А. Компьютерное моделирование и расчет электрических цепей. Резисторные и динамические цепи.: учеб. пособие / С. А. Башарин, Ю. А. Бычков. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 1994. 79 с.
4.Васильев А. С. Передаточные функции вентильных преобразователей
в системах электропитания при малых возмущениях / А. С. Васильев, П. А. Кошелев // Электричество. 1985. № 1.
5.Кошелев П. А., Парамонов С. В., Пшенкин С. Н. Моделирование электронных устройств в символьных и матричных математических вычислительных средах // Exponenta pro: Математика в приложениях. 2004.
№3–4. С. 146–152.
6.Теория и практика создания компьютеризированных электроприводных систем для высоких технологий / сост.: М. П. Белов, Л. П. Козлова, В. А. Новиков. Под ред. В. А. Новикова. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2007. 60 с.
7.Егоренков Д. Л.,. Фрадков А. Л, Харламов В. Ю. Основы математического моделирования с примерами на языке MATLAB. СПб.: Изд-во БГТУ, 1994. 191 с.
8.Худяков В. Ф., Хабузов В. А. Моделирование источников вторичного электропитания в среде MATLAB.X: учеб. пособие / Ред.-изд. центр ГУАП.
СПб., 2008.
9.Кошелев П. А., Парамонов С. В., Пшенкин С. Н. Автоматизированное оптимальное проектирование системы управления источником питания для плазменной резки в программах на языке MATLAB // Официальное электронное издание Трудов II Всерос. науч. конф. «Проектирование научных и инженерных приложений в среде MATLAB» (ISBN 5-201-14971-5), М., 25–26 мая 2004. М.: Изд-во Ин-та проблем управления им. В. А. Трапезни-
кова РАН. С. 988–999.
10.Nelder J. A., Miad R. A Simplex Method for Function Minimisation. – The Comp Journal. № 7. 1985. P. 308–313.
11.Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: учеб. пособие. СПб.: КОРОНА принт., 2001.
12.Хьюлсман Л. П. Активные фильтры. М.: Мир. 1982. 456 с.
30