

Sb96854
.pdfМИНОБРНАУКИ РОССИИ
________________________________
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
________________________________
ИССЛЕДОВАНИЕ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ В ГИРОСКОПИЧЕСКИХ СИСТЕМАХ
Учебно-методическое пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2018
УДК 531.387(07)+534.014.1(07) ББК В213.33я7+К948я7
И88
Авторы: А. М. Боронахин, Л. Н. Подгорная, А. Н. Ткаченко, Р. В. Шалымов.
И88 Исследование колебательных процессов в гироскопических системах: учеб.-метод. пособие/ СПбГЭТУ «ЛЭТИ», 2018. 47 с.
ISBN 978-5-7629-2323-1
Содержит описание лабораторных работ, в которых исследуются свободныеивынужденныеколебаниявразличныхвидахгироскопическихмаятников.
Предназначено для студентов, обучающихся по направлению 12.03.01 «Приборостроение».
УДК 531.387(07)+534.014.1(07) ББК В213.33я7+К948я7
Рецензент канд. техн. наук П. А. Иванов (ООО «Инертех»).
Утверждено редакционно-издательским советом университета
в качестве учебно-методического пособия
ISBN 978-5-7629-2323-1 |
СПбГЭТУ «ЛЭТИ», 2018 |
2

Лабораторная работа № 1 ГИРОСКОПИЧЕСКАЯ СТАБИЛИЗАЦИЯ ОДНОРЕЛЬСОВОГО ВАГОНА
Цельработы:практическоеизучениегироскопическойстабилизацииподвижного объекта.
1. Описание лабораторной установки
Основные теоретические сведения по теории гироскопов изложены в [1]. Лабораторная установка состоит из стилизованного макета вагона и ис-
пытательного стенда.
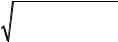
На макете вагона установлен стабилизирующий гироскоп (рис. 1.1), кожух которого может поворачиваться вокруг оси, перпендикулярной продольной плоскости вагона. На кожухе гироскопа укреплен груз m так, чтобы при вертикальном положении продольной плоскости вагона и неподвижном роторе гироскоп представлял собой неустойчивый физический маятник. В свою очередь вагон вместе с гироскопом можно рассматривать как неустойчивый физический маятник. Таким образом, вагон вместе с гироскопом являются системой с двумя неустойчивостями.
Рис. 1.1. Кинематическая схема однорельсового вагона, стабилизированного гироскопом
Уголβповоротагироскопаотносительновагонаотсчитываетсявизуально по шкале, укрепленной на оси вращения кожуха гироскопа. Электропитание подается на гироскоп посредством гибкого кабеля от щита, установленного на лабораторном столе.
3
Испытательныйстендпредставляетсобойметаллическуюплиту,накоторой установлены два кронштейна с крючками. Надев колеса гироскопа на крючки стенда, превращаем и вагон, и гироскоп из неустойчивых маятников в устойчивые.
Технические характеристики гироскопа:
масса mг 7,35 кг;
диаметр ротора d 100мм;
кинетический момент H 6,0 кг м2/с;
полярный момент инерции ротора J0 1,9 10 3 кг м2;
скорость вращения ротора n 3 104 об/мин.
2.Программа лабораторной работы
1.Определение частот колебаний устойчивых физических маятников.
2.Определение наименьшего значения кинетического момента гироскопа, необходимого для стабилизации макета вагона.
3.Определение частоты колебания гироскопа и зависимости амплитуды колебаний от времени.
3. Методические указания по выполнению работы
Роторгироскопанедолженвращаться. Используяотверстиявколесахвагона, подвесить его на крючках кронштейнов стенда. При этом и вагон, и гироскоп превращаются в устойчивые физические маятники.
Не касаясь гироскопа, отклонить вагон от положения равновесия и, пользуясь секундомером, определить период колебаний вагона. После этого, удерживаявагонвравновесномположении,отклонитьгироскопотположенияравновесия и определить период колебаний гироскопа.
Каждый из периодов определить 10 раз. Вычислить средние значения периодовиихсредниеквадратическиеотклонения.Поформуле 2  T вычис-
T вычис-
лить средние значения круговых частот колебаний физических маятников. Результаты измерений и вычислений записать в табл. 1.1.
Наименьшеезначениекинетическогомомента,необходимоедлястабилизации вагона, может быть вычислено по формуле:
Hmin |
AB 12 22 , |
(1.1) |
4
где A – момент инерции вагона относительно оси, совпадающей с «рельсом»; B – момент инерции гироскопа относительно оси вращения его кожуха.
Моменты инерции A и B имеют следующие числовые значения:
A 0,06 кг м2; B 7 10 4 кг м2.
Экспериментальное определение наименьшего значения кинетического момента гироскопа производится следующим образом.
Снять модель вагона со стенда и поставить колесами на стол. Удерживая руками груз гироскопа в крайней верхней точке, выключить тумблер питания гироскопа (~120 В). Одновременно запустить секундомер. Отпуская на короткое время руки, остановить секундомер, когда гироскоп перестанет стабилизировать вагон. Значение кинетического момента в этот момент времени можно оценить по кривой выбега ротора. Для того чтобы построить кривую выбега ротора, надо замерить время его полной остановки.
Таблица 1.1
Результаты определения частот колебаний физических маятников
Параметр |
|
|
|
|
|
Значение |
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
9 |
10 |
|
|
|
|
||||||||||
Период колебаний вагона, |
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение периода |
|
|
|
|
|
|
|
|
|
|
|
|
колебаний вагона, с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее квадратичное |
|
|
|
|
|
|
|
|
|
|
|
|
отклонение периода коле- |
|
|
|
|
|
|
|
|
|
|
|
|
баний вагона, с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение |
круго- |
|
|
|
|
|
|
|
|
|
|
|
вой частоты колебаний ва- |
|
|
|
|
|
|
|
|
|
|
|
|
гона, c-1 |
|
|
|
|
|
|
|
|
|
|
|
|
Период колебаний |
гиро- |
|
|
|
|
|
|
|
|
|
|
|
скопа, с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение периода |
|
|
|
|
|
|
|
|
|
|
|
|
колебаний гироскопа, с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее квадратичное |
|
|
|
|
|
|
|
|
|
|
|
|
отклонение периода коле- |
|
|
|
|
|
|
|
|
|
|
|
|
баний гироскопа, с |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение |
круго- |
|
|
|
|
|
|
|
|
|
|
|
вой частоты колебаний ги- |
|
|
|
|
|
|
|
|
|
|
|
|
роскопа, c-1 |
|
|
|
|
|
|
|
|
|
|
|
|
Полагая, что кинетический момент гироскопа убывает по закону |
|
|
||||||||||
|
|
|
H Hнe t , |
|
|
|
|
|
|
(1.2) |
||
5
где Hн – номинальное значение кинетического момента, можно построить кривую выбега или иначе график зависимости H(t). Коэффициент определяется по формуле, вытекающей из предыдущей:
|
1 |
ln |
Hн , |
(1.3) |
|
||||
|
t |
H |
|
|
|
1 |
|
1 |
|
где t1 – момент времени, при котором H (t1) H1. |
|
|
|
|
||||
При расчетах можно принять, что t1 |
совпадает со временем полной оста- |
|||||||
новки ротора, а H1 имеет значение |
|
|
|
|
|
|
|
|
H1 Hн 10 4. |
|
|
(1.4) |
|||||
|
|
|
|
|
|
|
Таблица 1.2 |
|
Результаты определения частоты и амплитуды колебаний гироскопа |
||||||||
|
|
|
|
|
|
|
|
|
Параметр |
|
|
|
|
Значение |
|
|
|
|
1 |
|
2 |
3 |
… |
|
n |
|
|
|
|
|
|||||
Период колебаний гироскопа, с |
|
|
|
|
|
|
|
|
Амплитуда колебаний гироскопа, …° |
|
|
|
|
|
|
|
|
Отношение последующей амплитуды |
|
|
|
|
|
|
|
|
к предыдущей |
|
|
|
|
|
|
|
|
Среднее значение периода колебаний |
|
|
|
|
|
|
|
|
гироскопа, с |
|
|
|
|
|
|
|
|
Среднее значение круговой частоты |
|
|
|
|
|
|
|
|
колебаний гироскопа, c-1 |
|
|
|
|
|
|
|
|
Среднее значение отношений ампли- |
|
|
|
|
|
|
|
|
туд |
|
|
|
|
|
|
|
|
Для определения частоты колебаний гироскопа необходимо снова разогнать ротор до номинальной скорости. Установив груз гироскопа в крайней верхней точке и предоставив вагон самому себе, запустить секундомер.
Период колебаний гироскопа определить по секундомеру. По шкале на оси кожуха гироскопа определить значения амплитуд колебаний гироскопа. Измерения сделать 5 раз, их результаты отразить в табл. 1.2. Для каждого измерения вычислить среднее значение периода и отношений амплитуд колебаний.
4.Содержание отчета
Вотчете должны быть представлены:
1.Кинематическая схема вагона с гироскопом и ее краткое описание.
2.Расчетные формулы, по которым производились вычисления.
6
3.Таблицы с результатами измерений и вычислений.
4.Ответы на контрольные вопросы.
5.Контрольные вопросы
1.В каких случаях возможна гироскопическая стабилизация неустойчивых систем?
2.Чем отличаются математический и физический маятники?
3.От чего зависит частота нутационных колебаний стабилизированного
вагона?
4.Какое влияние оказывают силы трения на стабилизированный вагон?
5.Как объяснить увеличение амплитуд колебаний гироскопа и вагона?
6.Чем отличаются друг от друга колебания гироскопа и вагона?
Список литературы
1. Булгаков Б. В. Прикладная теория гироскопов. М.: Гос. изд-во тех- нико-теоретической литературы, 1955.
Лабораторная работа № 2 ИССЛЕДОВАНИЕ СВОБОДНЫХ КОЛЕБАНИЙ ПЛОСКОГО ГИРОСКОПИЧЕСКОГО МАЯТНИКА
Цель работы: практическое изучение свободных колебаний плоского гироскопическогомаятника,которыйвзависимостиоттого,вращаетсягироскоп или нет, можно рассматривать как колебательную систему либо с одной, либо с двумя степенями свободы.
1. Основные теоретические сведения
Основы теории колебаний систем с одной, двумя и многими степенями свободы изложены в [1].
Основы теории плоского гироскопического маятника освещены в [2]. Эта книга мало доступна студентам, поэтому дается краткое изложение ее четырнадцатого параграфа. Кинематическая схема маятника изображена на рис. 2.1.
Гироскоп 1 установлен внутри кольца 2, жестко связанного со стержнем 4. Корпус гироскопа может поворачиваться вокруг оси, совпадающей с осью стержня, относительно кольца 2 на угол β. Значение угла β ограничивается пружиной 3. При нулевом значении этого угла β ось вращения ротора гироскопанаходитсявплоскостикольца.Стерженьвместескольцомигироскопом
7
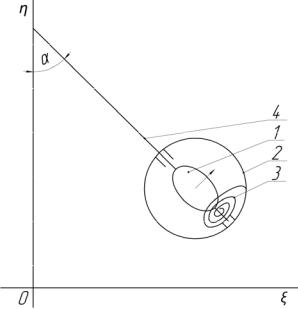
может качаться в вертикальной плоскости вокруг горизонтальной оси 3, поворачиваясь при этом на угол α.
Рис. 2.1. Кинематическая схема плоского гироскопического маятника
ЕслипренебречьвращениемЗемлиисиламитрения,малыеколебаниятакой системы будут описываться уравнениями:
|
|
|
A mgl H 0; |
(2.1) |
|
|
0, |
|
B c H |
|
|
где A – момент инерции всей первичной системы относительно оси качания стержня; B – момент инерции гироскопа в сборе относительно оси вращения корпуса гироскопа; H – кинетический момент гироскопа; m – масса подвижной системы; l – расстояние от оси качения стержня до центра инерции подвижной системы; g – ускорение силы тяжести.
Уравнения по своей форме совпадают с уравнениями гиромаятника и маятникового гирокомпаса, работающих при тех же условиях. Поэтому плоский гироскопический маятник предлагается рассматривать как физическую модель гиромаятника или гирокомпаса, на котором можно наблюдать основные свойства последнего.
Уравнения (1.1) представляют собой уравнения движения системы с двумя степенями свободы, находящейся под воздействием консервативных и гироскопических сил. К консервативным силам относятся сила тяжести и реакция деформированной пружины. При H 0, т. е. при невращающемся ро-
8

торегироскопа,системауравнений(2.1)распадаетсянадванезависимыхуравнения, каждое из которых описывает колебания системы с одной степенью свободы
A mgl 0;
(2.2)
B c 0,
Круговые частоты незатухающих колебаний систем с одной степенью свободы имеют значение:
k mgl |
; |
k |
c |
. |
(2.3) |
|
|
||||||
|
A |
|
|
B |
|
|
|
|
|
|
|||
Дляотысканиячастныхрешенийуравнений(2.1)воспользуемсяприемов,
вкотором решения определяются в той же форме, что и для (2.2):
a cos kt ;
bsin kt ,
где a, b – неизвестные амплитуды колебаний; k, – неизвестные, но одинаковые для углов и частота и начальная фаза колебаний.
После подстановки этих предполагаемых частных решений в (2.1), получим однородную систему уравнений:
( Ak 2 mgl) Hkb 0; Hka ( Bk 2 c)b 0.
Если бы частота k была известна, по этим уравнениям можно было бы найти отношение амплитуд колебаний:
b |
|
Ak 2 |
mgl |
|
Hk |
|
. |
a |
Hk |
Bk 2 |
|
||||
|
|
c |
|||||
Однако для этого необходимо, чтобы определитель однородной системы уравнений был равен нулю. В этом случае получим уравнение, по которому можно будет определить неизвестную частоту k :
( Ak 2 mgl)( Bk 2 c) H 2k 2 0.
Назовем полученное уравнение уравнением частот. Использовав обозначение (2.3), перепишем это уравнение в следующей форме:
(k 2 k 2)(k 2 k 2) kH2 k 2 0
или после очевидных преобразований k 4 (k 2 k 2 kH2 )k 2 k 2k 2 0, где kH H AB .
AB .
9
Квадраты корней биквадратного уравнения частот должны иметь вещественные положительные значения. Тогда искомая частота k также будет иметь два вещественных положительных значения:
k 2 |
|
1 |
(k 2 |
k 2 |
k 2 |
f 2); |
(2.4) |
12 |
|
2 |
|
|
H |
|
|
f 2 (k 2 k 2 kH2 )2 4k 2k 2.
Такимобразом,процессизменениякаждогоизуглов (t)
(2.5)
и (t) представ-
ляет собой наложение друг на друга двух частот, одна из которых большая, другая – меньшая. Разность между квадратами большей и меньшей частоты увеличивается с увеличением частоты kH , т. е. с увеличением кинетического
момента H без увеличения моментов инерции A и B. Это легко достигается путем увеличения скорости вращения ротора.
Если kH2 k2 и kH2 |
k 2, правую часть формулы (2.5) можно разложить |
|
в ряд по степеням малых величин k kH |
и k kH . В этом случае будем |
|
иметь: |
|
|
k 2k 2
f 2 k 2 k 2 kH2 2 k 2 (kH2
H
После подстановки (2.6) в (2.4), получаем:
|
|
|
2 |
|
k 2 |
|
|
|
||
k |
k |
0 |
1 |
k |
|
|
; k |
2 |
k |
H |
|
|
|||||||||
1 |
|
|
kH2 |
|
kH2 |
|
||||
|
|
|
|
|
|
|
|
|||
где
k 2 k 2). |
|
(2.6) |
||||
|
|
|
|
|
||
2 |
|
k 2 |
|
|
||
1 |
k |
|
|
, |
(2.7) |
|
kH2 |
kH2 |
|||||
|
|
|
|
|||
k0 |
|
mglc |
|
k k |
. |
(2.8) |
|
H |
kH |
||||||
|
|
|
|
|
Частота k0 имеетследующийсмысл:есливуравнениях(2.1)принять,что моментами сил инерции A и B можно пренебречь по сравнению с гироскопическими моментами H , H и моментами консервативных сил mgl и c , то вместо (2.1) получим mgl H 0 и c H 0. Продифференцируем второе уравнение и после этого вычтем его из первого. В результате получим H 2 mglc 0 или k02 0.
10