

Sb96854
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
(p) |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p2 2 2p k 2 |
|
|
|
|
|
|
|
|
; |
|
|
|
|
|||||||||||||||
|
|
p4 2 1 2 p3 k 2 k 2 kH2 4 1 2 |
p2 1k 2 2k 2 p k 2k 2 |
(3.8) |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kH2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|||||
|
p4 2 1 2 p3 k 2 k 2 kH2 4 1 2 |
p2 1k 2 2k 2 p k 2k 2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
где k |
|
|
C |
; k |
H |
|
|
H |
; |
2 |
|
n |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
B |
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
После замены символа p символами |
j , найдем: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
(j ) |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 2 2 4 22 2 |
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||
|
|
4 |
|
2 |
2 |
|
2 |
4 1 2 |
2 |
|
|
|
2 2 |
|
|
2 |
|
2 |
4 |
1 |
2 |
|
2 |
2 |
|
|
2 |
|
2 |
||||||||||||||
|
|
|
|
k k |
kH |
|
|
k k |
|
|
|
|
|
|
|
1k 2k |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
k 2 W (j ) HH id .
Модулипередаточныхфункций W ( j ) , W ( j ) и,соответственно,ам-
плитуды вынужденных колебаний маятника имеют максимумы при частотах возмущающего момента, близких к частотам k1 и k2 собственных колебаний
плоского гиромаятника [3]. Пользуясь (3.5) и (3.8), можно найти отношение амплитуд вынужденных колебаний стержня маятника и гироскопа:
|
0 |
|
H |
|
k 2 2 2 4 22 2 |
. |
(3.9) |
|
A |
|
kH2 |
||||
0 |
|
|
|
|
|||
На основании (3.9) можно сделать следующие выводы.
1. При 2 k 2 и 2 0, 0 0. В этом случае можно наблюдать эффект успокоения колебаний стержня маятника за счет колебаний гироскопа.
21
2. При условии, что 2 k 2, амплитуда вынужденных колебаний стержня маятника тем больше, чем больше коэффициент 2, т. е. чем больше вязкое трение относительно оси вращения гироскопа.
3. Описание лабораторной установки
Лабораторная установка отличается от установки, описанной в лабораторной работе № 2 «Исследование свободных колебаний плоского гироскопического маятника», наличием устройства для создания периодического возмущающего момента. Кинематическая схема устройства изображена на рис. 3.2.
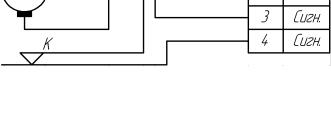
Рис. 3.3. Схема включения двигателя
В установке используется двигатель постоянного тока, управляемый изменением сопротивления цепи возбуждения. Для этого последовательно с обмоткой возбуждения двигателя включен реостат. Перед началом работы надо, поворачивая ротор двигателя, установить кривошип 3 в такое положение, при котором сигнал датчика угла поворота маятника будет иметь такое же значение, как и при снятой пружине 2. Принципиальная электрическая схема установки отличается от принципиальной электрической схемы, описанной в работе№2,тем,чтовданномслучаедополнительноимеютсятриэлектрические цепи питания и управления двигателем и цепь сигналов угла поворота кривошипа (рис. 3.3).
4.Программа работы
1.Настройка и регулировка установки.
2.Снятие амплитудно-частотной характеристики маятника при неподвижном роторе гироскопа.
3.Снятие амплитудно-частотных характеристик маятника и гироскопа приразныхзначенияхмоментасилвязкоготренияотносительноосивращения корпуса гироскопа.
22
5.Порядок выполнения работы
1.Включить ПК, на рабочем столе ПК запустить программу «Самописец», нажав на соответствующий ярлык. Подать на датчик угла α напряжение 27 В. Поочередно отклонить маятник и гироскоп на предельные углы в одну и другую стороны. В окне программы «Самописец» убедиться в поступлении сигналов с АЦП и подобрать коэффициент усиления сигналов таким образом, чтобы сигналы датчиков не попали в зону «насыщения». Записать предельные значения сигналов датчиков углов α поворота маятника и β поворота гироскопа.
|
|
Таблица 3.1 |
|
Результаты настройки установки |
|
|
|
|
Потенциометр угла |
Направление отклонения |
Значение сигнала, полученного |
поворота |
стержня или гироскопа |
с АЦП, ед. |
Стержня (α) |
Вправо |
|
Влево |
|
|
|
|
|
Гироскопа (β) |
Вправо |
|
Влево |
|
|
|
|
|
Подать напряжение на обмотки якоря и возбуждения двигателя, перемещая рукоятку реостата, оценить диапазон изменения угловой скорости двигателя. Задав двигателю наибольшую скорость вращения, запустить запись в файл сигнала датчика угла стержня. С помощью секундомера оценить частоту вращения кривошипа.
После проверки обесточить двигатель. Остановить запись файла.
2.Подать питание на двигатель устройства для задания периодического возмущающего момента. Двигателю задать наименьшую скорость вращения, одновременно запустив запись в файл сигналов датчика угла стержня. Записать несколько колебаний. Задать двигателю наибольшую скорость вращения
иснова записать колебания маятника. Остановить вращение двигателя. После окончания записи и успокоения колебаний, подобрать такую скорость вращения двигателя, при которой амплитуда колебаний маятника будет увеличиваться во времени. Записать несколько колебаний, после чего двигатель и запись файла остановить.
3.Подать питание на гироскоп. Винт с красной головкой завернуть до
отказа. Через 5 10 мин, когда угловая скорость ротора гироскопа достигнет номинального значения, подать питание на двигатель устройства для задания
23
периодического возмущающего момента. Двигателю задать наименьшую скорость вращения. После этого запустить запись в файл сигналов потенциометрических датчиков углов. По окончании записи колебаний двигатель остановить. После того как колебания маятника прекратятся, задать двигателю наибольшую скорость вращения и снова записать колебания маятника и гироскопа. После окончания записи и успокоения колебаний подобрать такую скорость вращения двигателя, при которой амплитуда колебаний маятника будет увеличиваться во времени, и снова записать колебания. После окончания записи остановить двигатель и запись сигналов датчика в файл.
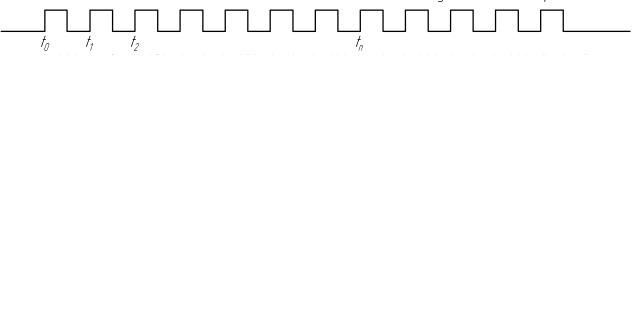
Рис. 3.4. Разметка графиков колебаний маятника
Запись колебаний повторить, вывернув винт с красной головкой на демпфере гироскопа на 5 оборотов. После записи колебаний остановить двигатель и ленту самописца, вывернуть винт дополнительно на 5 оборотов и в третий раз записать колебания при разных скоростях вращения двигателя.
Графики колебаний разместить так, как показано на рис. 3.4. Результаты обработки записей колебаний заносятся в табл. 3.2 и 3.3. По
результатам обработки записей колебаний, приводимым в табл. 3.2, должно бытьсделанозаключениеовлияниипериодавозмущающегомоментанаамплитуду вынужденных колебаний маятника. Средние значения величин и их дисперсии вычисляются по формулам, приводимым в лабораторной работе № 2.
24
Таблица 3.2
Результаты обработки записей вынужденных колебаний маятника при неподвижном роторе гироскопа
|
Время одного оборота кривошипа |
|
|
|
|
|
Текущее время |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(период возмущающего момента), с |
|
|
t0 |
|
t1 |
|
|
|
|
tn |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Период колебаний воз- |
|
|
TM , c |
|
|
|
|
|
|
|
|
|
|
|
|
Tср |
|
|||||||
|
мущающего момента |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Амплитуда вынужден- |
|
|
|
d0, ед. |
|
|
|
|
|
|
|
|
|
|
|
|
dср |
|
||||||
|
ных колебаний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Периоды вынужденных |
|
T , c |
|
|
|
|
|
|
|
|
|
|
|
|
Tср |
|
|
|
||||||
|
колебаний маятника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
|
|||||
|
Результаты обработки записей вынужденных колебаний |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
плоского гиромаятника |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Текущее время |
t, |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Положение винта демпфера |
|
Завернут |
|
|
Повернут на 5 об. |
|
Повернут на 10 об. |
|
|||||||||||||||||
max |
|
min |
p |
|
max |
min |
|
p |
|
max |
|
min |
|
|
p |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Период колеба- |
TM , c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ний возмущаю- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
щего момента |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Амплитуда маят- |
, |
ед. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Амплитуда гиро- |
, |
ед. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
скопа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазовый сдвиг |
, |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Период колеба- |
T , |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ний маятника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Период колеба- |
T , |
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ний гироскопа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По результатам, приведенным в табл. 3.3, должны быть сделаны выводы:
1)о соотношении амплитуд вынужденных колебаний гироскопа и маятника;
2)о фазовых сдвигах колебаний маятника и гироскопа;
3)о влиянии периода возмущающего момента на амплитуды вынужденных колебаний;
4)о влиянии степени демпфирования колебаний гироскопа.
25
6. Содержание отчета
Отчет должен содержать:
1.Кинематическую схему плоского гироскопического маятника.
2.Размеченные графики колебаний.
3.Таблицы результатов обработки записей и графики зависимости α(ω)
иβ(ω)амплитудвынужденныхколебанийотчастотывозмущающегомомента.
4.Письменные объяснения полученных результатов.
Список литературы
1.ПоновкоЛ.Г.Введениевтеориюмеханическихколебаний.М.:Наука,
1983.
2.Булгаков Б. В. Прикладная теория гироскопов. М.: Изд-во Моск. ун-
та, 1976.
Лабораторная работа № 4 ИССЛЕДОВАНИЕ СВОБОДНЫХ КОЛЕБАНИЙ
СФЕРИЧЕСКОГО И ГИРОСКОПИЧЕСКОГО МАЯТНИКОВ
Цель работы: практическое изучение свободных колебаний систем с двумя степенями свободы, к которым относятся сферический и гироскопический маятники.
1. Основные теоретические сведения
Основные сведения по теории колебаний систем с двумя степенями свободы изложены в [1]. Теория колебаний гиромаятника изложена в [2].
2. Теоретические сведения, необходимые для выполнения работы
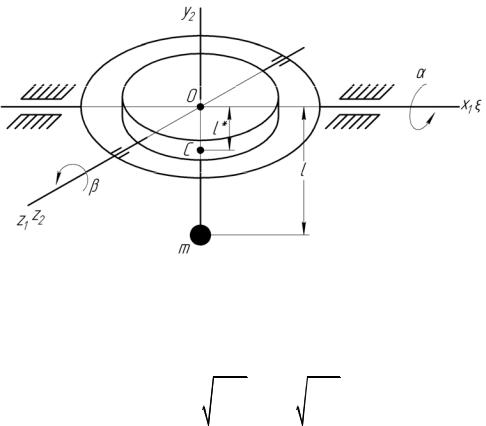
Кинематическая схема гиромаятника изображена на рис. 4.1. Гироскопический маятник представляет собой гироскоп с тремя степе-
нями свободы в кардановом подвесе, у которого за счет груза m центр инерции находится на оси вращения ротора гироскопа на некотором расстоянии
l от точки O пересечения осей подвеса.
Если гиромаятник установлен на неподвижном основании (угловая скорость вращения Земли не учитывается), а груз m находится ниже точки пересечения осей подвеса, то движение маятника приближенно описывается следующими дифференциальными уравнениями:
26
|
|
A mgl H 0; |
(4.1) |
|
|
B mgl H 0, |
|
где A – момент инерции подвижной части маятника относительно оси |
вра- |
щениянаружногокольца; B – момент инерции гироскопа в сборе вместе с грузом относительно оси вращения z2 корпуса гироскопа; m – масса груза; l – расстояние от груза до точки O пересечения осей подвеса.
Рис. 4.1. Кинематическая схема гиромаятника
При невращающемся роторе, т. е. при H 0, гироскопический маятник превращается в сферический маятник, совершающий незатухающие колебания с частотами
k |
mgl |
; |
k |
mgl . |
(4.2) |
|
A |
|
|
B |
|
Амплитуды колебаний сферического маятника зависят от начальных |
|||||
условий. В том случае, когда при t 0, |
|
|
0, амплитуды незатухающих |
||
0 0 |
|||||
колебаний будут равны начальным отклонениям 0 и 0.
Грубое приближенное представление о поведении гиромаятника можно получить, если в (4.1) не учитывать моменты сил инерции A и B . Тогда будем иметь следующие уравнения:
|
|
|
mgl H 0; |
(4.3) |
|
mgl H 0, |
||
|
После исключения из (4.3) одной из переменных, например , получим уравнение H 2 m2g 2l2 0, которое позволяет сделать вывод, что гиромаятник совершает незатухающие колебания с частотой
27
k0 |
mgl . |
(4.4) |
|
H |
|
Для того чтобы составить более полное приближенное представление о поведении гиромаятника, надо знать распределение корней характеристического уравнения системы уравнений (4.1). Это уравнение имеет следующий вид:
Ap2 mgl Bp2 mgl H 2p2 0
или после очевидных преобразований:
ABp4 H 2 mgl A B p2 m2g 2l2 0.
Использовав обозначения (4.2), будем иметь |
|
|||||
|
|
|
p4 k 2 k 2 kH2 p2 k k 0, |
(4.5) |
||
где kH |
H |
. |
|
|
|
|
AB |
|
|
|
|||
|
|
|
|
|
||
Величина kH |
H |
представляет собой частоту быстрых нутационных |
||||
AB |
||||||
|
|
|
|
|
||
колебаний гиромаятника. Квадраты корней уравнения (4.5) имеют значения:
|
|
p122 12 k 2 k 2 kH2 f 2, |
|
где f 2 |
k 2 k 2 kH2 |
4k 2k 2, так как f 2 k 2 k 2 kH2 |
, то корни ха- |
рактеристического уравнения p1 p4 чисто мнимые. Это значит, что гиромаятник будет совершать незатухающие колебания с некоторыми частотами k1
иk2, представляющими собой модули мнимых корней.
Втом случае, когда kH2 k 2 и kH2 k 2, частоты k1 и k2 имеют следующие приближенные значения:
|
|
|
2 |
|
k 2 |
|
|
|
2 |
|
k 2 |
|
||||
k |
k |
0 |
1 |
k |
|
|
; k |
2 |
k |
H |
1 |
k |
|
|
. |
(4.7) |
|
|
|
|
|||||||||||||
1 |
|
|
kH2 |
|
kH2 |
|
|
kH2 |
|
kH2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Таким образом, процесс изменения углов α и β представляет собой наложение друг на друга незатухающих колебаний с частотами k1 и k2.
Если относительно осей вращения наружного и внутреннего колец подвеса действуют моменты сил трения, амплитуды колебаний как физического,
28
так и гироскопического маятников будут убывать по закону геометрической прогрессии в случае трения вязкого, или по закону арифметической прогрессии в случае трения сухого. Частоты колебаний при этом изменяются настолько незначительно, что это изменение частот за счет сил трения можно не принимать во внимание.
В том случае, когда центр инерции гироскопа находится выше точки пересечения осей карданова подвеса, уравнения движения гиромаятника будут отличаться от уравнений (4.1) знаком перед слагаемыми mgl и mgl . Физический маятник при этом будет неустойчивым.
Нетрудно убедиться в том, что характеристическое уравнение гиромаятника в данном случае будет:
p4 kH2 |
k 2 k 2 p2 k k 0. |
(4.8) |
Это значит, что гиромаятник будет совершать незатухающие колебания возле положения равновесия 0 и 0 только тогда, когда выполняется условие
k 2 |
k 2 |
k 2 |
|
H |
|
|
|
или |
|
|
|
H |
mgl(A B). |
(4.9) |
|
Таким образом, в данном случае речь идет о гироскопической стабилизации неустойчивой системы, что, согласно теореме Томсона и Тета, возможно только для нечетного числа неустойчивостей. Наличие диссипативных сил или, иначе, сил трения, приводит к тому, что амплитуды колебаний гиромаятника с течением времени будут увеличиваться. Следовательно, гироскопическая стабилизация неустойчивой системы станет не полной, а будет наблюдаться только на ограниченном интервале времени.
3. Описание лабораторной установки
Лабораторная установка состоит из макета гироскопического маятника, пульта управления и АЦП, подключенного к ПК. Кинематическая схема макета гиромаятника изображена на рис. 4.2.
Макетгиромаятникапредставляетсобойгироскопстремястепенямисвободы в кардановом подвесе.
29

Рис. 4.2. Кинематическая схема макета гиромаятника: 1 – гироскоп; 2 – наружное кольцо; 3, 4 – потенциометры
Рис. 4.3. Принципиальная электрическая схема макета гиромаятника и пульта управления: К1, К2, К3 ключи; П3, П4 потенциометры;
Г гироскоп
30