

Sb96854
.pdfВкачествегироскопа1использованасинхронныйэлектродвигательтрехфазного переменного тока, частота которого 500 Гц, напряжение 40 В. Корпус (статор)электродвигателяодновременноявляетсявнутреннимкольцомкардановаподвеса. Накорпусегироскопаукреплены стержни,вдолькоторых могут перемещаться грузы m1 и m2. Меняя положение грузов, можно измерить рас-
стояние l от центра инерции системы до точки O пересечения осей карданова подвеса. Корпус гироскопа может поворачиваться относительно наружного кольца 1 вокруг оси z2 на угол β.
Наружное кольцо 2 может поворачиваться относительно неподвижного основания вокруг оси x1 на угол α. Углы α и β преобразуются в электрические напряженияпотенциометрами3и4.Принципиальнаяэлектрическаясхемамакета гиромаятника и пульта управления изображена на рис. 4.3.
4.Программа работы
1.Измерение величины сигналов датчиков углов поворотов α и β.
2.Исследования колебаний физического маятника (гироскоп не враща-
ется).
3.Исследование колебаний гиромаятника.
4.Исследование колебаний неустойчивого маятника, стабилизированного гироскопом.
5.Порядок выполнения работы
1. Измерение величины сигналов датчиков углов α и β.
Включить ПК, на рабочем столе ПК запустить программу «Самописец», нажав на соответствующий ярлык. Установить по уровню основания прибора в горизонтальной плоскости. Подать напряжение 27 В на потенциометрические датчики углов β и α. Отклонив маятник на предельный угол β и α, в окне программы «Самописец» убедиться в поступлении сигналов с АЦП и подобрать коэффициент усиления сигналов таким образом, чтобы сигналы датчиков не попали в зону «насыщения». Записать величину перемещения пера самописца в единицах съема.
Результаты измерений занести в табл. 4.1.
2. Исследование колебаний физического маятника.
31
Грузы m1 и m2 (рис. 4.2) установить в такое положение, чтобы центр инерции системы был ниже точки пересечения осей подвеса. Подать напряжения на потенциометры П3 и П4 (рис. 4.3).
|
|
Таблица 4.1 |
|
Величина сигналов датчиков углов поворотов |
|||
|
|
|
|
Потенциометр угла |
Направление отклонения |
Значение сигнала, |
|
поворота |
маятника |
полученного с АЦП, ед. |
|
α |
Вправо |
|
|
Влево |
|
|
|
|
|
|
|
β |
Вправо |
|
|
Влево |
|
|
|
|
|
|
|
Отклонить маятник на предельные углы α и β. Запустить запись в файл сигналов датчиков углов. По окончании колебаний маятника запись остановить.
Пользуясь первым столбцом (время в микросекундах) файлов записи, определить периоды колебаний T и T .
Определить отношение каждой пары рядом расположенных амплитуд разных знаков. Определить также разность между каждыми двумя рядом стоящими амплитудами разного знака. Сделать вывод о том, какое трение (сухое или вязкое) действует относительно каждой из осей подвеса маятника.
2 |
ln |
i 1 |
|
i 1 |
определитьотносительныйкоэф- |
|
Поформуле ( ) |
|
|
|
|||
T T |
i |
i |
||||
фициент момента сил вязкого трения. Полученные результаты поместить в табл. 4.2.
Полупериоды и амплитуды колебаний должны быть обозначены на ленте символами так, как это показано на рис. 4.4.
Рассчитать и привести средние значения, дисперсии и среднеквадратиче-
ские отклонения параметров: T |
|
|
, |
DT |
, |
T |
|
, |
T |
|
|
, DT , T |
, |
|
i 1 |
|
, |
|||||||||||||||||
ср |
|
ср |
|
|
||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
ср |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
D |
|
|
|
, |
|
|
, i 1 i |
|
, |
D |
|
|
|
, |
|
|
|
|
, |
|
i 1 |
|
|
, |
D |
|
|
, |
||||||
|
|
|
i 1 |
ср |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
i 1 |
i 1 |
i |
|
|
|
||||||||||||||||||||||||||
|
|
i 1 |
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
i |
|
|
|
ср |
|
i 1 |
|
||||||||||
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
||
|
i 1 |
, |
i 1 i ср , |
D i 1 i , |
|
i 1 i . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
32

Рис. 4.4. Разметка записи колебаний
Таблица 4.2
Результаты измерений параметров свободных колебаний физического маятника
|
T |
, с |
α, ед. |
|
i 1 |
|
|
|
, ед. |
|
T |
, с |
β, ед. |
|
i 1 |
|
|
|
, ед. |
|
|
|
|||||||||||||||||
|
2 |
|
|
|
i |
|
i 1 |
i |
|
|
2 |
|
|
|
i |
|
i 1 |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечания: 1. Средние значения параметров, оценки их дисперсий и средних квадратичных отклонений вычисляются по формулам:
|
xср |
1 |
n |
||
|
|
xi; |
|||
|
|
|
n i 1 |
||
|
1 |
|
n |
xi xср 2; |
|
Dx |
|
||||
|
|||||
|
n 1i 1 |
|
|||
|
x |
Dx , |
|||
где n – число измерений; x – измеряемый параметр.
2. При вычислениях относительного коэффициента момента сил вязкого трения ν использовать средние значения полупериодов колебаний и отклонений амплитуд.
33
На основании полученных результатов должны быть даны ответы на следующие вопросы:
Как можно объяснить разницу в периодах колебаний T и T ?
Какое трение (вязкое или сухое) действует относительно каждой из осей подвеса маятника?
Какое из колебаний заканчивается раньше и чем это можно объяс-
нить?
3. Исследование колебаний гиромаятника.
Подать на гироскоп напряжение 40 В частотой 500 Гц. Подождать
5 10 мин пока разгонится ротор гироскопа. Момент окончания разгона можно оценить по изменению высоты звука гиродвигателя. После окончания разгона ротора подать напряжение на оба потенциометра. Отклонить гиромаятник на те же предельные углы, на какие был отклонен маятник при не вращающемся роторе.
В момент отпускания маятника запустить запись в файл сигналов датчиков угла маятника.
После того как прекратятся колебания гиромаятника или после записи 5 10 периодов, запись в файл остановить, потенциометры и гироскоп обесточить. Графики колебаний разместить так, как показано на рис. 4.4. Численные значения параметров колебаний занести в табл. 4.3, аналогичную табл. 4.2.
По результатам измерений: |
|
|
|
|
|
построить фазовую траекторию |
|
движения маятника; |
|||
|
ответить на вопрос: как периодыβи |
декременты затухания колебаний |
|||
|
α |
|
|
|
|
гиромаятника изменились по сравнению с физическим маятником? |
|||||
4. Исследование колебаний неустойчивого маятника, стабилизирован- |
|||||
ного гироскопом. |
|
|
|
|
|
При не вращающемся роторе гироскопа грузы |
и |
(рис. 4.2) устано- |
|||
вить так, чтобы центр инерции подвеса находился выше точки пересечения осей подвеса.
Подать напряжения на потенциометры П3 и П4 (рис. 4.3). Руководствуясь показаниями датчиков углов в программе «Самописец», руками установить маятник в положения, при котором углы α и β имеют значения близкие к нулевым. Удерживая руками маятник в этом положении, подать напряжение
34
на гироскоп. После разгона ротора гироскопа освободить гироскоп и начать запись в файл показаний датчиков углов маятника. После того, как будет записано 5–10 периодов колебаний, запись остановить, гироскоп и потенциометры обесточить.
Графики колебаний разметить так, как показано на рис. 4.4. Численные значенияпараметровколебанийзанестивтабл.4.4,аналогичнуютабл.4.2и4.3.
По результатам измерений:
построить фазовую траекторию f ( ) движения маятника;
сравнить периоды колебаний устойчивого и неустойчивого гиромаят-
ников;
сравнитьотношениярядомстоящихамплитудколебанийустойчивого
инеустойчивого маятников;
сделать заключение об особенностях свободных колебаний физического маятника, устойчивого и неустойчивого гиромаятников.
6. Содержание отчета
Отчет должен содержать:
1.Кинематическую схему и краткое описание гиромаятника.
2.Графики колебаний.
3.Расчетные формулы.
4.Таблицы результатов обработки записей колебаний.
5.Графики фазовых траекторий f ( ) для устойчивого и неустойчи-
вого гиромаятников.
6.Ответы на поставленные вопросы.
7.Заключение об особенностях колебаний физического, устойчивого и неустойчивого гиромаятников.
Список литературы
1.ПоновкоЯ.Г.Введениевтеориюмеханическихколебаний.М.:Наука,
1983.
2.Сайдов П. И. Теория гироскопов. М.: Высш. шк., 1965.
35
Лабораторная работа № 5 ИССЛЕДОВАНИЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
СФЕРИЧЕСКОГО И ГИРОСКОПИЧЕСКОГО МАЯТНИКОВ
Цель работы: практическое изучение вынужденных колебаний сферического и гироскопического маятников.
1. Основные теоретические сведения
Основы теории колебаний систем с одной, двумя и многими степенями свободы изложены в [1], свободные колебания гиромаятника в [2]. Вынужденные колебания этого устройства как системы с двумя степенями свободы в доступной литературе не рассматриваются.
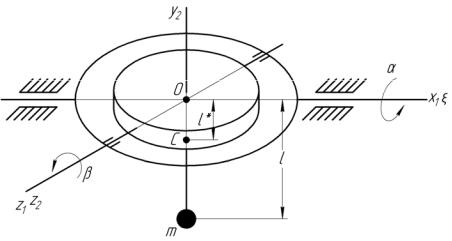
Кинематическая схема гиромаятника дана на рис. 5.1.
Рис. 5.1. Кинематическая схема гиромаятника
Гироскопический маятник представляет собой гироскоп с тремя степенямисвободывкардановомподвесе,укоторогозасчетгрузаm центринерции
находится на оси вращения ротора гироскопа на некотором расстоянии l от точки пересечения осей подвеса.
Если гиромаятник установлен на основании, движущемся поступательно (илинеподвижном)так,чтоотносительноосивращениянаружногокольцакарданова подвеса действует периодический возмущающий момент M x1 M0sin t,уравнения движения гиромаятника будут:
|
|
|
|
|
|
A n mgl H M 0sin t; |
(5.1) |
||||
|
|
|
|
0, |
|
B n mgl H |
|
||||
|
|
|
|
|
|
36
где A – момент инерции подвижной системы относительно оси вращения наружного кольца подвеса; B – момент инерции гироскопа в сборе относительно оси вращения корпуса гироскопа; H – кинематический момент гироскопа; n , n – коэффициенты моментов сил вязкого трения относительно
осей вращения колец карданова подвеса; m – масса груза; g – ускорение силы тяжести.
Периодический возмущающий момент Mx1 может возникнуть, если основание будет двигаться поступательно вдоль неподвижной оси с ускорением W , которое изменяется по закону W W0sin t. В этом случае M0 mlW0, где M 0 – амплитуда возмущающего момента; ω – круговая ча-
стота; m – масса груза; l – расстояние от груза маятника до точки пересечения осей подвеса.
Периодический возмущающий момент можно также создать, если растягивать пружину 2 вращающимся кривошипом 3 (рис. 5.2).
Рис. 5.2. Кинематическая схема устройства для создания периодического возмущающего момента: 1 – маятник; 2 – пружина; 3 – кривошип; 4 – редуктор; 5 – двигатель
В последнем случае амплитуда возмущающего момента будет: |
|
M0 Cr, |
(5.2) |
где C – жесткость пружины; r – длина кривошипа.
Круговая частота ω колебаний возмущающего момента в данном случае совпадаетсугловойскоростьювращениякривошипа.Еслиучитыватьвлияние жесткости C на свободные колебания системы, вместо (5.1) будем иметь следующие:
37
|
|
|
|
|
|
|
A n mgl Cr H M0sin t; |
(5.3) |
|||||
|
|
|
|
H |
0, |
|
B n C |
|
|||||
|
|
|
|
|
|
|
где M 0 определяется (5.2). При H 0, |
т. е. при не вращающемся гироскопе, |
|||||
(5.3) распадаются на два независимых друг от друга уравнения, одно из которых описывает вынужденные, а второе – свободные колебания системы с одной степенью свободы. Дифференциальное уравнение вынужденных колебаний имеет вид:
|
A n |
|
|
t; |
|
|
|
|
|
|
|
(5.4) |
||||
|
C M 0sin |
|
|
|
|
|
|
|
||||||||
где C mgl Cr. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При M0 0 маятник совершает свободные колебания, которые описыва- |
||||||||||||||||
|
|
|
|
|
|
n |
|
|
|
|
C |
|
|
C |
|
|
ются уравнением De |
1t sin k t , где |
|
|
|
; |
k |
|
|
|
2 |
|
|
. |
|||
|
2A |
A |
A |
|||||||||||||
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|||||
Уравнение (5.4) имеет следующее решение: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
e 1t D sink |
t D |
cosk t |
0 |
sin |
t . |
|
|
(5.5) |
||||||||
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Первые слагаемые этой формулы, содержащие множитель e 1t , описывают так называемый переходный процесс, который быстро заканчивается. Последнее слагаемое описывает установившиеся вынужденные колебания, амплитуда и фазовый сдвиг которых вычисляются по формулам:
0 |
|
M0 |
1 |
; tg |
2 1 |
. |
(5.6) |
|
k 2 2 |
||||||
|
|
A k 2 2 2 4 12 2 |
|
|
|
||
Прималом 1, |
т.е.прималоммоментесилвязкоготрения,амплитуда 0 |
||||||
установившихся вынужденных колебаний имеет максимум при частоте ω возмущающего момента, которая всегда немного меньше, чем частота k свободных колебаний маятника.
Удовлетворительную оценку максимальной амплитуды можно получить, приняв, что k . Тогда
0 |
M0 |
1 |
. |
(5.7) |
A |
4 |
|||
|
|
1 |
|
|
Необходимо отметить, что амплитуда вынужденных колебаний при резонансе, т. е. при k , возрастает до своего максимального значения (5.7) во
38

времени или, иначе говоря, постепенно. В то же время угол β поворота внутреннего кольца относительно наружного от периодического возмущающего момента Mx1 не зависит.
2. Дополнительные теоретические сведения
Амплитуды установившихся вынужденных колебаний маятника и гироскопа можно определить, пользуясь частотным методом. Если процессы y(t) на выходе и x(t) на входе устойчивой динамической системы связаны друг с другом зависимостью y(tw) W(jw)x(t ),где y(tw) и x(t ) – изображение процессов по преобразованию Фурье; W(jw) – передаточная функция динамической системы, а y(t) и x(t) представляют собой гармоническую функцию времени, то их амплитуды y0 и x0 связаны зависимостью
y0 |
|
W ( jw) |
|
x0. |
(5.8) |
|
|
||||
Для того чтобы получить передаточные функции процессов (t) |
и (t) |
||||
по отношению к возмущению M0sin t, перепишем уравнения (5.2) в операторной форме при нулевых начальных условиях:
|
|
Ap2 n p C Hp x(p); |
|
(5.9) |
|||
|
|
Hp Bp2 n p mgl 0, |
|
||||
|
|
|
|
||||
где x(p) – изображение гармонического процесса M0sin t. |
|
||||||
Разрешив (5.9) относительно изображений (p) |
и (p), найдем переда- |
||||||
точные функции: |
|
|
|
|
|
||
|
|
|
Bp2 n |
p mgl |
|
|
|
W (p) |
|
|
|
|
; |
||
Ap2 |
n p C Bp2 |
n p mgl |
H 2p2 |
||||
|
|
(5.10) |
|||||
|
|
|
Hp |
|
|||
W (p) |
|
|
|
. |
|||
|
Ap2 |
n p C Bp2 |
n p mgl |
H 2p2 |
|||
|
|
|
|||||
Разделив числитель и знаменатель (5.10) на AB, после очевидных преобразований получим:
W (p) 1A
39

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
2 2 |
2 |
p k |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
||||||||
|
p4 2 1 2 p3 k 2 k 2 kH2 4 1 2 p2 1k 2 2k 2 p k 2k 2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (p) |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kH2 p |
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|||||||||
|
p4 2 1 2 p3 k 2 k 2 kH2 4 1 2 p2 1k 2 2k 2 p k 2k 2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
где k |
|
|
mgl |
; k |
H |
|
|
H |
; |
2 |
|
n |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
B |
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
, найдем: |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
символами |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
После замены символов |
|
|
|
|
|
W (j ) |
|
|
|
1ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 2 2 4 22 2 |
|
|
|
|
|
|
|
|
|
|
; |
||||||||||||||||||||
|
|
4 |
|
2 |
2 |
|
2 |
|
4 1 2 |
|
2 |
2 2 |
2 |
|
|
|
|
2 |
4 |
1 |
2 |
|
2 |
2 |
2 |
|
2 |
||||||||||||||||||||
|
|
|
|
k k |
kH |
|
|
|
k k |
|
|
|
|
1k |
2k |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W (j ) |
|
|
kH2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
4 |
|
2 |
2 |
|
2 |
4 1 2 |
|
2 |
2 2 |
2 |
|
2 |
4 |
1 |
2 |
|
2 |
2 |
2 |
|
2 |
||||||||||||||||||||||||
|
|
|
|
k k |
kH |
|
|
|
k k |
|
|
|
1k 2k |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Модули передаточной функций W ( j ) и W ( j ) и, соответственно,
амплитуды вынужденных колебаний маятника имеют максимумы при частотах возмущающего момента, близких к частотам k1, k2 собственных колебаний гиромаятника (см. лабораторную работу № 2).
3. Описание лабораторной установки
Лабораторная установка отличается от установки, описанной в работе № 4 «Исследование свободных колебаний сферического и гироскопического маятника», наличием устройства для создания периодического возмущающего момента. Кинематическая схема устройства дана на рис 5.2.
В установке используется двигатель постоянного тока, управляемый изменением сопротивления цепи якоря. Для этого последовательно с обмоткой якоря двигателя включен реостат.
40