

Sb95858
.pdf(ИУПО), используемое в работе, является самостоятельным программным обеспечением (ПО) для IBM-совместимого ПК. Минимальные требования к ПК: IBM PC 486 DX4-100. ИУПО поддерживает обмен данными с МПИ в формате BINARYT. Этот формат является наиболее полным и предоставляет возможность доступа ко всем данным МПИ K-161В.
Питание
АБ
3.0… 9.0 В
От
внешнего
опорного генератора
Питание |
|
|
Преобразователь |
||
МПИ |
||
5.0 В |
напряжений |
|
|
|
|
3.3 В |
|
От УВ |
(Вход канала 1 RS-232C) |
|
|
От ПДД |
(Вход канала 2 RS-232C) |
К АБ
МПИ
РПУ
Сигнал «1 Гц»
Сигнал «Отказ»
УЦО
СВ
(Выход канала 1)
Рис. 1.2
Информационно-управляющее программное обеспечение предназначено:
для введения основных исходных данных: значения даты, времени, априорных координат положения (широта и долгота) и высоты. Они предназначены для сокращения времени поиска сигналов НКА. После получения первого навигационного решения исходные данные заменяют-
ся данными, полученными по СРНС;
11
наблюдения навигационной обстановки в целом и работы измерительных каналов МПИ;
наблюдения координат в виде абсолютных значений и графика их погрешностей;
наблюдения поправок времени и частоты в виде абсолютных значений и графика их погрешностей;
записи данных от МПИ в файл и просмотра сеанса по файлу;
управления работой МПИ для выбора СРНС и систем координат, времени и установки параметров линии обмена с МПИ.
1.2. Порядок работы выполнения лабораторной работы
Внимание! Убедитесь, что адаптер вставлен в розетку. Далее никаких операций с модулем приемоизмерителя «К-161В» производить не следует!
Процедура измерений отводится специальному программному обеспе-
чению ИУПО_TIME - K_161_TimeRus (ШВЕА.103003-02). Функциональную клавишу  или
или  следует нажимать только после внимательного чтения указаний данного пособия, так как некорректные действия могут привести к изменению установок или к потере накопленных данных.
следует нажимать только после внимательного чтения указаний данного пособия, так как некорректные действия могут привести к изменению установок или к потере накопленных данных.
1.2.1. Запуск программы
На рабочем столе находится ярлык с именем «K161_TimeRus» (рис. 1.3). Сделайте на нем двойной щелчок левой клавишей мыши или запустите программу через главное меню («ПУСК Главное меню Программы
ИУПО_TIME K_161_TimeRus»).
Рис. 1.3 |
Рис. 1.4 |
12
Во время запуска программы на экране будет присутствовать окно (рис. 1.4). Через некоторое время после запуска появится окно, как на рис. 1.5.
Рис. 1.5
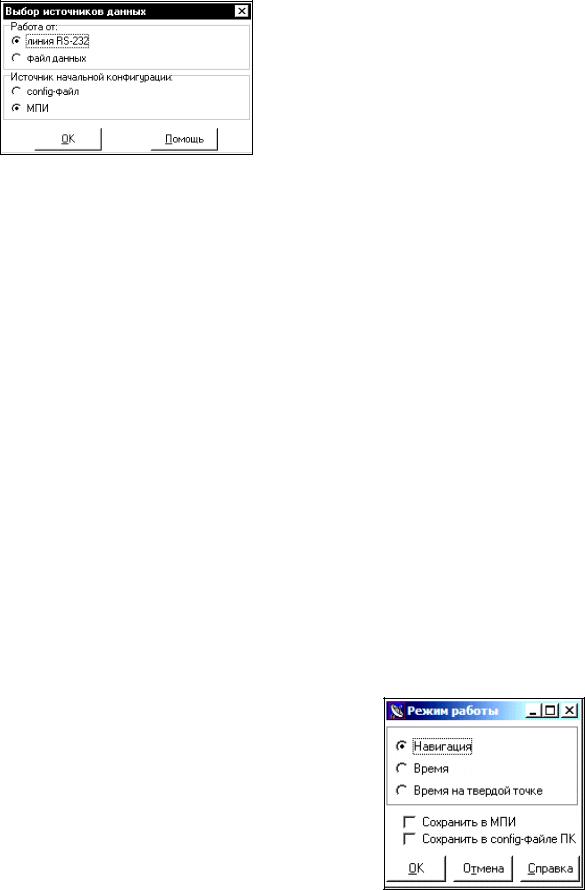
1.2.2. Выбор источника данных
Существует два варианта запуска программного обеспечения:
1)линия RS-232 – работа от линии RS-232 (COM-port);
2)файл данных – получение исходных данных из записанного ранее файла с расширением (*.dat).
Связано это с тем, что ИУПО поддерживает два режима работы: «реальный сигнал» и «эмуляция». Режим «реальный сигнал» является основным и предназначен для работы по реальным сигналам СРНС, режим «эмуляция» – для воспроизведения ранее проведенного сеанса по записанным в файл данным.
В соответствии с указаниями преподавателя в качестве источника данных следует выбирать линию RS-232, т. е. режим работы «реальный сигнал», а в качестве источника начальной конфигурации МПИ (рис. 1.5).
1.2.3. Настройка программного оборудования
Нажмите на иконку  , расположенную сверху на главной линейке. При этом на экране появится окно «Режим работы» (рис. 1.6). Черная точка должна быть установлена в положение «Навигация». Далее нажмите клавишу
, расположенную сверху на главной линейке. При этом на экране появится окно «Режим работы» (рис. 1.6). Черная точка должна быть установлена в положение «Навигация». Далее нажмите клавишу  .
.
Выбирается режим «Навигация», так как в этом режиме определяются все возможныезначения – координаты положения, составляющие скорости, поправку времени относительно установленной шкалы времени и поправку по частоте; можно работать в
подрежиме «GPS + GLONASS» и использовать при необходимости дифференциальные данные (ДД). Режимы работы «Время» и «Время на твер-
дой точке» имеют ограничения. Кнопка  вызывает более подробную информацию.
вызывает более подробную информацию.
Рис. 1.6
13
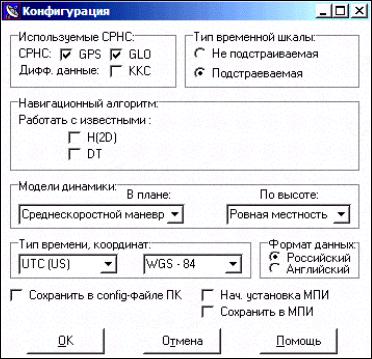
Нажмите на иконку  , и на экране должно отобразиться окно «Конфигурация» (рис. 1.7). Все установки должны соответствовать этому рисунку.
, и на экране должно отобразиться окно «Конфигурация» (рис. 1.7). Все установки должны соответствовать этому рисунку.
Окно «Конфигурация» предназначено для установки основных навигационных параметров только в режиме работы «Реальный сигнал».
Опция поля «Дифф. данные» определяет, будут ли использоваться дифференциальные данные от ККС. Опция действует только в режиме «Навигация», в режимах «Время» и «Время на твердой точке» дифференциальные данные не используются.
Рис. 1.7
Опции «Н(2D)», «DT» определяют размерность навигационного решения (принудительно, независимо от количества НКА, использованных в решении). Опция «Н(2D)» устанавливает навигацию с известной высотой, введенной оператором с помощью исходных данных, а опция «DT» – с известным смещением шкалы времени (ШВ) GPS и ГЛОНАСС, определенным ранее из навигационного решения при еще приемлемом факторе.
При не установленной опции «Н(2D)» («DT») МПИ определяет все три плановые координаты (смещение ШВ), а при недостаточном геометрическом факторе автоматически переходит к работе с известной высотой (смещением ШВ), используя значение высоты (смещением ШВ GPS и ГЛОНАСС), полученное ранее из навигационного решения с еще приемлемым фактором.
14
Модели динамики (в плане и по вертикали) определяют для МПИ правила экстраполяции координат, выполняемой при невозможности навигационных определений, а также предельно допустимые значения высоты и скорости для мониторинга. В режимах работы «время» и «время на твердой точке» приемлемы только статические модели динамики (в плане и по высоте).
Опция формата данных: «Российский», «Английский», устанавливает одну из двух используемых в ИУПО систем мер и весов: российскую или английскую. Действие формата распространяется на все окна ИУПО, изображающие данные с указанными размерностями, в том числе на диаграммы и на результаты статистики.
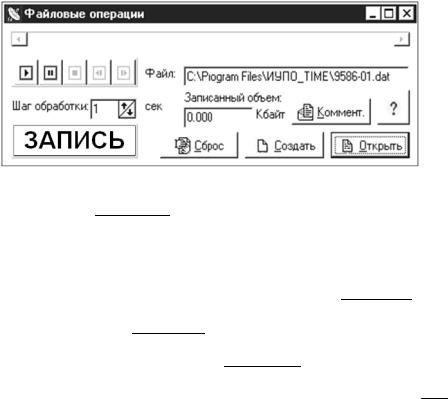
Запустите окно «Файловые операции» нажатием клавиши «F11» на консоли или иконки  (рис. 1.8).
(рис. 1.8).
Рис. 1.8
Нажмите кнопку  – этим вы вызовете окно «Введите имя файла», позволяющее дать имя файлу записи/чтения. Он может иметь расширение только «*.dat». Необходимо ввести имя следующим обра-
– этим вы вызовете окно «Введите имя файла», позволяющее дать имя файлу записи/чтения. Он может иметь расширение только «*.dat». Необходимо ввести имя следующим обра-
зом: №группы-№подгруппы-1.dat и нажать клавишу 
 .
.
После этого нажмите 

 и выберите созданный ранее файл, подтвердив выбор нажатием клавиши
и выберите созданный ранее файл, подтвердив выбор нажатием клавиши 
 .
.
Для начала записи информации в файл нажмите клавишу  . При этом надпись «ЧТЕНИЕ» изменится на «ЗАПИСЬ», последнее показано на рис. 1.8. Текущее окно «Файловые операции» можно закрыть.
. При этом надпись «ЧТЕНИЕ» изменится на «ЗАПИСЬ», последнее показано на рис. 1.8. Текущее окно «Файловые операции» можно закрыть.
Внимание: Название файла с перспективой дальнейшей обработки записанных данных следует запомнить, а потом внести в протокол.
В главном меню «Просмотр» выделите все возможные окна, а затем ми-
нимизируйте их, как показано на рис. 1.9.
15

Рис. 1.9
Внимание: не закрывайте и не открывайте повторно работающие окна! Закрытие или повторное открытие окна ведет к потере накопленной инфор-
мации. Необходимо выполнять минимизацию окон –  .
.
1.2.4. Фиксирование навигационной обстановки
Для выполнения этого пункта необходимо выбрать режим «Обстановка», максимизировав (нажав на  ) соответствующее окно. По выполнению этого действия на экране появится окно «Обстановка» (рис. 1.10).
) соответствующее окно. По выполнению этого действия на экране появится окно «Обстановка» (рис. 1.10).
Рис. 1.10
Оно предназначено:
1. Для наблюдения навигационной обстановки в целом, для чего в окне отражены:
видимые НКА и их угловые координаты (азимут – «Азимут, град» и
угол возвышения – «УМ, град»);
16

наличие дифференциальных данных «ДД».
2.Для наблюдения за работой измерительных каналов модуля приемоизмерителя, для чего в окне отражены:
рабочие номера каналов НКА «№ канала»;
соответствие каналу приемника определенного типа «СРНС, НКА». В данном поле отражается тенденция изменения угла места НКА. Для восходящих НКА (угол места увеличивается) индицируется знак «+», для нисходящих (угол места уменьшается) – знак «–», для НКА в зоне траверза (изменение угла места незначительно) – знак «С»;
изменение местоположения спутника по угловым координатам;
поиск/слежение сигнала «П/С». При поиске выполняется просмотр частотно-временного диапазона вокруг целеуказаний – примерных данных о сигнале НКА, рассчитанных на основе исходных данных и альманахов НКА. При слежении выполняется измерение радионави-
гационных параметров; отношение сигнал/шум «с/ш, дБ·Гц»;
Азимут – угловое расстояние между фиксированным направлением (обычно на север) и направлением на объект. Угол возвышения – угол между вектором линии прямой видимости НКА и горизонтальной плоскостью.
На диаграмме НКА изображаются кружками с их системными номерами в центре. НКА подкрашиваются цветами: зеленым  – НКА GPS, голубым
– НКА GPS, голубым
 – НКА ГЛОНАСС. Изображаются все НКА, находящиеся выше горизонта. НКА в зените изображается в центре мишени, НКА на горизонте – на внешней окружности. Сплошной линией на диаграмме прорисовывается окружность, соответствующая введенному в МПИ значению минимального
– НКА ГЛОНАСС. Изображаются все НКА, находящиеся выше горизонта. НКА в зените изображается в центре мишени, НКА на горизонте – на внешней окружности. Сплошной линией на диаграмме прорисовывается окружность, соответствующая введенному в МПИ значению минимального
угла возвышения ( min). НКА, расположенные внутри этой окружности, считаются видимыми и могут быть назначены на каналы. Назначенные на каналы НКА обведены красной линией. НКА, обведенные черной линией, считаются невидимыми и не назначаются на каналы.
Для того чтобы зафиксировать навигационную обстановку, необходимо:
1.В режиме работы окна «Обстановка» нажать на клавишу «Print Scrn Sys Rq» (рис. 1.11).
Рис. 1.11
17
2.Минимизировать окно программы одним нажатием левой клавиши мыши (рис. 1.12).
Рис. 1.12
3.Запустить двойным нажатием левой клавиши мыши файл-образец (PROTOCOL1.doc), который расположен на рабочем столе. После запуска текстового редактора MS Word необходимо приступить к заполнению таблицы, т. е. к созданию файла-отчета.
4.Поместить мигающий курсор в нужное поле таблицы и нажать на клавишу  . Уберите флажок
. Уберите флажок  и нажмите «ОK». Изображение окна «Обстановка» должно получиться строго в полях ячейки таблицы, где был помещен мигающий курсор.
и нажмите «ОK». Изображение окна «Обстановка» должно получиться строго в полях ячейки таблицы, где был помещен мигающий курсор.
5.Сохранить занесенную в протокол информацию, нажав на иконку  . Указать новое имя файла, которое должно совпадать с созданным ранее (№группы-№подгруппы-1.doc).
. Указать новое имя файла, которое должно совпадать с созданным ранее (№группы-№подгруппы-1.doc).
6.После этого следует не закрывать программу Word, а путем мини-
мизации окна (см. п. 2) вернуться в программу работы с приемоизмерителем «К-161В».
Замечание: во избежание потери данных, прекратив работу с окнами, закрывать или повторно запускать их не следует, достаточно выполнять минимизацию.
1.2.5. Определение координат места и времени
Для выполнения этого пункта необходимо выбрать режим «Навигация», для чего следует максимизировать (развернуть) одноименное окно. По выполнении этих действий на экране появится изображение (рис. 1.13).
Окно «Навигация» предназначено для отображения текущих результатов работы МПИ K-161В значений времени, координат и их погрешностей, скоростей, а также сведения о системах представления результатов и навигационном сеансе.
Данное окно содержит диаграмму типа «мишень», отображающую траекторию объекта в плане; три диаграммы типа «линейка», отображающих значения высоты, путевой и вертикальной составляющих скорости; диаграмму типа
18
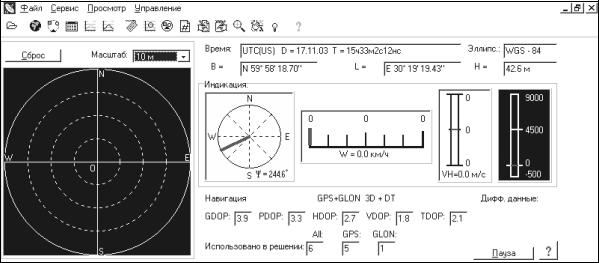
Рис. 1.13
«компас», отображающую направление движения и числовые и текстовые данные. Четыре последние диаграммы объединены в поле «Индикация».
Диаграмма «мишень» отображает траекторию объекта в плане. В выпадающем меню «Масштаб» предусмотрены значения масштабов 10 м, 100 м, 1000 м, 10 км, 100 км, 1000 км. Радиус диаграммы устанавливается равным выбранному значению масштаба. Кнопка «Сброс» стирает изображенную траекторию.
В индикационном поле «Режим навигации» устанавливается одно из следующих значений: 3D+DT, 3D, 2D+DT, 2D. Любое из них может быть дополнено словом «ЭКСТРАПОЛЯЦИЯ», если созвездия НКА недостаточно для работы в указанном режиме.
Режим «Навигация» устанавливает вид навигационных определений, выполняемых МПИ. Режим навигации может быть задан оператором с ПК, или установлен МПИ автоматически (при плохом геометрическом факторе):
в режиме 3D+DT определяются три координаты положения (широта, долгота и высота) и смещение ШВ GPS и ГЛОНАСС;
в 3D – три координаты положения с использованием известного (ранее определенного или введенного с ПК) смещения ШВ GPS и ГЛОНАСС;
в 2D+DT – две координаты положения (широта и долгота) и смещение ШВ GPS и ГЛОНАСС с использованием известной (ранее определенной или введенной с ПК) высоты;
в 2D – две координаты положения (широта и долгота) с использованием известных (ранее определенных или введенных с ПК) высоты и
смещения ШВ GPS и ГЛОНАСС.
19
Смещение ШВ GPS/ГЛОНАСС – разность между показаниями часов ШВ GPS/ГЛОНАСС. Время в СРНС основано на очень высокостабильных генераторах частоты, поэтому смещение ШВ медленно меняется во времени (10…20 нс/сут). Значение смещения можно запоминать и использовать как известную постоянную величину, что позволяет получать навигационное решение по смешанному созвездию четырех НКА GPS и ГЛОНАСС, как и по созвездию одной СРНС.
Экстраполяция (счисление) – линейный прогноз координат положения по последним определенным значениям скорости.
Геометрический фактор – описание геометрического вклада в погрешность определения местоположения. Это матрица коэффициентов, рассчитываемая по координатам НКА и МПИ. Коэффициенты являются множителями, с которыми погрешность измерения квазидальности переходит в погрешности определяемых координат и времени.
В индикационном поле геометрических факторов отображаются значения общего фактора (GDOP) и факторов по положению (PDOP), в плане
(HDOP), по высоте (PDOP) и по времени (TDOP).
Отсутствующее на рис. 1.13 индикационное поле «Дифф. данные» может показывать наличие дифференциальных данных от контрольно-коррек- тирующей станции. Индикатор будет включаться, если имеются корректирующие поправки хотя бы для одного НКА.
Индикационное поле «Использовано в решении» показывает количество НКА каждой СРНС, использованных в последнем навигационном решении.
1.2.6. Проверка точностных характеристик МПИ
Для выполнения этого пункта необходимо выбрать режим «Статистика», для чего следует максимизировать (развернуть) одноименное окно. После выполнения этих действий на экране появится изображение (рис. 1.14).
Окно «Статистика» предназначено для проверки точностных характеристик. Здесь рассчитываются средние значения и среднеквадратические отклонения для погрешностей координат и составляющих скорости. Погрешности координат рассчитываются относительно установленной эталонной точки, погрешности скоростей и поправок времени и частоты – относительно нулевых значений. При установленной опции «Производить расчет без эталонной точки» рассчитываются средние значения координат. В этом случае поле средних значений погрешностей координат дезактивируется, а поле координат делается активным (при работе с эталонной точкой поле координат пассивно).
20