

1284
.pdf20
Подводя итог определениям и свойствам систем, можно отметить следующее. Любая система представляет собой комплекс взаимодействий, посредством которых она проявляется как нечто определенное и целостное. Всякое взаимодействие представляет собой процесс обмена систем веществом, энергией, информацией и т.п., имеет переменный характер, противоречие (борьба) периодически чередуется с содействием (сотрудничеством). Роль и назначение взаимодействий противоречия и содействия не равноценны. Только диалектические противоречия выступают в качестве внутреннего импульса, источника движения и развития природы, общества, мышления, техники.
Противоречия в технических системах чрезвычайно разнообразны по форме и проявлениям, имеют преходящий исторический характер, взаимосвязаны и взаимообусловлены. В процессе решения научно-технических задач последовательно выявляются вначале внешние, а затем внутренние противоречия на все более углубляющемся уровне. Внешние противоречия предшествуют научно-технической задаче и создают мотивы для ее выявления и решения. Среди внутренних противоречий (противоречий самой структуры системы) выделяют основные и главные технические и физические противоречия. Основные противоречия складываются между определяющими, т.е. внутренними и необходимыми, сторонами в структуре системы. Радикальное разрешение основного противоречия приводит к коренному изменению качественной определенности предмета. Главным противоречием является такое, от разрешения которого в данный момент зависит дальнейшее развитие предмета.
Технические противоречия возникают между элементами системы и их частями, между техническими параметрами и свойствами. Они состоят в том, что, например, увеличение мощности полезного агрегата может вызвать недопустимое ухудшение экологической обстановки или требуемое повышение прочности вызывает недопустимое увеличение массы конструкции и т.д.
Физические противоречия состоят в наличии у одного и того же элемента системы (ее мысленной модели) взаимопротивоположных физических свойств или функций. Например, элемент электрической схемы должен быть проводником, чтобы выполнялось одно действие, и одновременно диэлектриком, чтобы выполнялось другое. Это противоречие разрешает такой элемент как диод.
Путь к решению задачи, к созданию качественно новой технической системы, лежит через выявление все более глубоких противоречий и нахождение способов их разрешения. В этом состоит одно из проявлений закона перехода количественных изменений в качественные. В то же время новая техническая система представляет собой органический синтез нового и некоторых элементов прежних решений в новом целом, демонстрируя тем самым действие закона отрицания отрицания как фундаментального принципа диалектики, определяющего всякое развитие. Более подробно физические и тех-
21
нические противоречия и способы их устранения рассматриваются в разделе
3.5.
Уровень технического развития зависит непосредственно как от уровня естествознания (от степени познания законов природы), так и от накопленных человечеством знаний в борьбе за покорение сил природы. Вместе с тем средства труда (техника) созданы человеком в процессе общественного производства и входят неотъемлемым элементом в систему производительных сил. В связи с этим техника неразрывно связана со способом производства, включающим и производственные отношения. Только экономические законы данного общественного строя определяют истоки, направления и темпы развития техники.
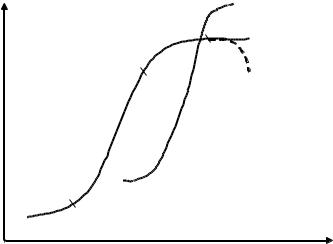
Жизнь любой системы (технической, системы живых организмов и др.) можно изобразить в виде логической кривой (рисунок 2.10), иллюстрирующей изменения во времени качества системы К (например, производительности, надежности и экономичности). Несмотря на индивидуальные особенности, эта зависимость имеет характерные участки, общие для всех систем. Вначале (участок 1) система А развивается медленно, существует в виде модели, опытной установки, единичного образца. Затем (участок 2) она быстро совершенствуется, начинается ее массовое применение. Затем темпы развития идут на спад (участок 3), система исчерпывает свои возможности. Далее техническая система деградирует и сменяется принципиально другой системой Б, иногда долгое время сохраняя достигнутые показатели (участок 4).
К
3 4
2
1 Б
А
t
Рисунок 2.10 – Развитие качества системы во времени
Жизненный цикл любой системы определяется ее одним свойством – развитием во времени, которое относится к динамическим свойствам. Система может повышать свое качество – это будет прогресс, сопровождающийся двумя стадиями – ростом и развитием. Развитие является следствием перехода количества в качество. Застой в развитии качества системы приводит к упадку и деградации. Это уже стадии регресса, логическим следствием
22
которого является физическая смерть системы. Для дальнейшего прогресса необходим толчок, например, «пионерское» изобретение и переход к новому поколению системы данного типа.
Знание особенностей развития технических систем необходимо для выяснения резервов и определения целесообразности совершенствования данной системы или создания принципиально новых решений. В связи с тем, что жизнеспособными оказываются только те технические решения, которые соответствуют закономерностям развития техники, особую ценность представляет способность исследователя правильно предвидеть направления и тенденции возможного изменения исходной технической системы и действовать в соответствии с этими закономерностями.
23
2.2Структура систем РЭС
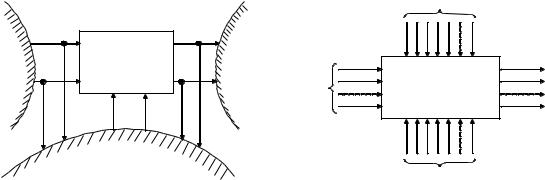
Вобщем виде схематическое представление взаимодействия радиоэлектронной системы с окружающей средой приведено на рисунке 2.11. Почти каждое РЭС представляет собой некоторую комбинацию таких составляющих, как параметры (переменные), компоненты, функциональные зависимости, ограничения, целевые функции, элементы, узлы, сигналы. Рассмотрим подробнее каждую из перечисленных категорий.
Совокупность параметров среды, которые воздействуют на РЭС, раз-
деляют на группы в зависимости от характера и доли их участия в процессе.
Всамом общем случае объект характеризуют следующие параметры: вход-
ные величины (входы) – x1, x2, …, xn; управляющие воздействия (управления)
– u1, u2, …, uk; возмущающие воздействия (возмущения) – z1, z2, …, zs; выходные величины (выходы) - y1, y2, …, ym.
а) |
|
|
x1 |
Среда |
…… |
|
xn |
y1
Объект |
…… |
ym |
|
…… |
|
z1 zq |
|
Среда |
|
Среда
Входные величины
Возмущающие
воздействия
б) |
z1 z2 |
zq |
x1 |
|
y1 |
x2 |
Объект |
y2 |
|
|
|
xn |
|
ym |
|
u1 u2 |
uk |
|
Управляющие |
|
|
воздействия |
|
Выходные сигналы
Рисунок 2.11 – Радиоэлектронная система как объект внешних воздействий
Входными принято называть параметры, значения которых могут быть измерены, но возможность воздействия на них отсутствует. Предполагается также, что эти параметры не зависят от режима работы РЭС.
Управляющими называются параметры, на которые можно оказывать прямое воздействие в соответствии с выбором разработчика или предъявляемыми требованиями, что позволяет управлять процессом. Управляющими параметрами могут быть, например, регулируемая сила тока в установке магнетронного напыления тонких пленок, инфракрасный сигнал с пульта дистанционного управления и т.п.
Возмущающими называют параметры, значения которых случайным образом изменяются с течением времени и которые не всегда доступны для измерения. Ими могут быть, например, температура окружающей среды, ат-
24
мосферное давление, относительная влажность воздуха, перепады напряжения в электрической сети, а также другие возмущения.
Выходными называют параметры, значения которых определяются режимом работы РЭС. Эти параметры характеризуют состояние технической системы как результат суммарного воздействия входных, управляющих и возмущающих параметров. Поскольку назначение выходных параметров – описывать состояние РЭС, их иногда называют параметрами состояния.
Описание каждого параметра (переменной) в РЭС должно производиться стандартным образом:
1)определение и символ;
2)текстовое описание;
3)единицы измерения;
4)диапазон изменения;
5)характеристики (однозначный, многозначный; параметр числовой или с кодированным значением; регулируемая, нерегулируемая или случайная переменная и т.д.);
6)место применения в системе;
7)источник параметра (переменной);
8)примечания.
Часть любой (не обязательно радиоэлектронной) системы, которая может быть выделена как самостоятельное, автономное образование, называют компонентом системы. Например, в технической системе «космический корабль» компонентами являются такие объекты, как тяговые механизмы, механизмы наведения, механизмы управления, несущая конструкция и т.п. Техническая система «персональный компьютер» может состоять из таких компонентов, как материнская плата, жесткий диск, видеокарта и т.п. В экономической системе «отрасль промышленности» компонентами могут быть отдельные производственные объединения, отдельные потребители и т.п.
Функциональные зависимости описывают поведение параметров (переменных) в пределах компонентов РЭС или выражают соотношения между ними. Эти соотношения, или операционные характеристики, по своей природе являются либо детерминированными, либо стохастическими. Детерминированные соотношения – это тождества или уравнения, которые устанавливают зависимость между переменными или параметрами в тех случаях, когда процесс на выходе РЭС однозначно определяется заданной информацией на входе. В отличие от этого стохастические соотношения представляют собой такие зависимости, которые при заданной входной информации дают на выходе неопределенный результат.
Ограничения представляют собой устанавливаемые пределы изменения значений переменных или ограничивающие условия распределения и расходования тех или иных средств (энергии, запасов, времени и т.п.). Они могут вводиться либо разработчиком (искусственные ограничения), либо самим РЭС вследствие присущих ему свойств (естественные ограничения). Например, для портативного радиоприемника искусственным ограничением являет-
25
ся набор принимаемых диапазонов волн, а естественным ограничением – время непрерывной работы от батарей питания. Большинство технических требований к РЭС представляет собой набор искусственных ограничений.
Целевая функция, или функция критерия, – это точное отображение целей или задач РЭС и необходимых правил оценки их выполнения.
Формально элементом считается объект, не подлежащий дальнейшему расчленению на части (при данном рассмотрении РЭС). Существенны только свойства элемента, определяющие его взаимодействие с другими элементами РЭС и влияющие на свойства РЭС в целом.
Элементный состав может быть гетерогенным (содержащим разнотипные элементы), гомогенным (содержать однотипные элементы) и смешанным (содержать группы однотипных элементов и группы разнотипных элементов).
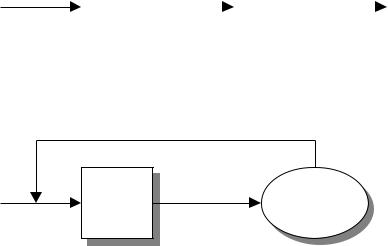
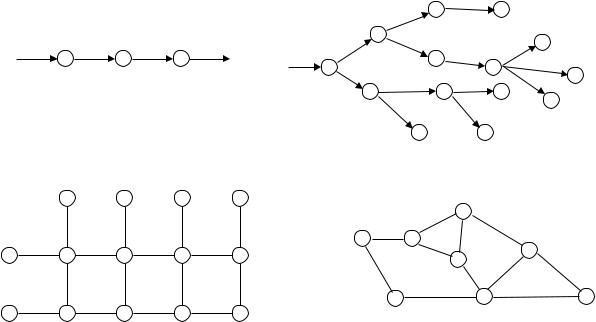
Структуру РЭС в некоторых случаях удобно описывать на языке теории графов. Построение структуры РЭС в виде графа удобно при декомпозиции объекта на элементы. Граф служит источником информации о соподчиненности и связях элементов. При этом элементы РЭС – вершины графа, связи – дуги графа. Связи могут быть нейтральные, прямые (рисунок 2.12, а) и обратные (рисунок 2.12, б), как положительные, так и отрицательные. Нейтральные связи не связаны с функциональной деятельностью РЭС, непредсказуемы или случайны. Наиболее часто встречающиеся типы структуры РЭС приведены на рисунке 2.13.
ij
|
i |
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а)
i
i |
U |
|
б)
Рисунок 2.12 – Прямая ( ij) и обратная ( i) связи: i, j –элементы РЭС; U –
блок сравнения выходных значений с каким-либо заданным
26
а)
б)
в) |
г) |
Рисунок 2.13 – Типы структур РЭС: а) линейная; б) древовидная; в) матричная; г) сетевая
Структуры с обратной связью реализуются в управляемых РЭС. Процесс управления можно представить как взаимодействие двух систем – управляющей и управляемой. Назначение управляющей системы – формировать такие воздействия на управляемую систему, которые бы побуждали бы последнюю принять состояние, определяемое целью управления.
В больших системах нельзя установить непроницаемые перегородки, разграничивающие действия переменных различной физической природы. Например, в современном высокотехнологическом процессе изготовления центрального процессора персонального компьютера нужно одновременно учитывать такие, не поддающиеся в реальных условиях разграничиванию процессы, как теплопередача, гидравлические процессы, кинетику множества одновременно протекающих реакций. Понятие элемента такой технологической системы и расчленение системы на элементы условны и зависят от целей анализа, так как каждый элемент можно рассматривать как систему.
Элементы могут накапливать, передавать, преобразовывать и рассеивать энергию или информацию. Типичными элементами являются тумблеры, переключатели, радиаторы, двигатели, триоды, конденсаторы и пр.
Точка, в которой соединяются элементы, называется узлом. В узлах не происходит никакого накопления, преобразования или рассеивания энергии; они похожи на абстрактные точки системы координат. Узлами, например, являются зажимы, контакты и клеммы для присоединения электрических проводников. В системном анализе практически каждое РЭС можно представить состоящим из элементов, узлов и подсистем.
27
Взаимодействие элементов в процессе функционирования сложного РЭС рассматривается как результат совокупности воздействий каждого элемента на другие элементы. Воздействие, представленное некоторым набором характеристик, называют сигналом. Каждый элемент РЭС в общем случае может принимать входные сигналы и выдавать выходные. Сигналы передаются по каналам связи, проложенным между элементами сложного РЭС.
Формально любая совокупность элементов данного РЭС может рассматриваться как ее подсистема. Обычно подсистемы являются некоторыми самостоятельно функционирующими частями РЭС. Например, в приемопередающей аппаратуре можно выделить подсистемы, соответствующие отдельным контурам усиления или детектирования. Правильное выделение подсистем сложного РЭС способствует упрощению расчетов при исследовании и более наглядной интерпретации его результатов. Подсистема составляется в виде структуры из элементов и целиком входит в полную управляемую систему. Поскольку подсистема – это самая крупная, функционирующая отдельно от общих связей, структурная единица, важным этапом работы является ее декомпозиция, основанная на сборе фактов, выявлении и оценке различных воздействующих факторов. Как правило, в ходе исследования приходится разделять РЭС на составные части, т.е. выполнять декомпозицию, а затем обследовать каждую часть в отдельности и объединять полученные сведения в единое целое.
Общая идея построения РЭС отображается в виде логической структурной схемы системы. Принято строить такую схему по модульному принципу, т.е. в виде совокупности стандартных блоков-модулей. Такой подход достаточно эффективен, логически оправдан и может быть легко осуществлен и проверен. При этом можно строить и совершенствовать схему РЭС итерационным методом, добавляя к основной схеме блок за блоком. Построение схемы из стандартных блоков дает возможность экспериментировать при ее реализации и в процессе машинной имитации.
При построении блочной схемы РЭС разделяют ее функции на логические подфункции с более высоким уровнем детализации. Каждое РЭС может быть разделена на блоки, а блоки – на подблоки. Этот процесс деления блоков на подблоки продолжается до необходимого уровня детализации описания РЭС. Таким образом, система функционально подразделяется на подсистемы. Используя современные языки программирования, можно получить модель РЭС, максимально приближенную к изучаемой системе (как в структурном, так и терминологическом отношении).
Представление исследуемого объекта в виде многоуровневой конструкции из элементов обычно называют структуризацией объекта. Структуризация – первый шаг на пути формального описания сложного РЭС. Другие необходимые шаги связаны с формализацией элементов РЭС и взаимодей-
ствий между ними. В структурированной системе объектами материального мира являются только элементы.
28
При декомпозиции сложных РЭС удобно расчленять их на типовые элементы, в которых протекают сходные между собой процессы. Для выделения типовых элементов (процессов) и определения их природы используют несколько основных критериев:
1)общность математического описания (модели) процессов, т.е. идентичность материальных и энергетических связей. Такая общность описания учитывает физико-химические особенности процессов;
2)общность аппаратурно-технологического оформления процессов, отражающая их целевое назначение и условия реализации;
3)общность особенностей автоматического управления, которая связана с природой процессов.
Далее выясняется, какие классы объектов должны находиться в РЭС, и какими параметрами каждый из них характеризуется; выбираются входные и выходные переменные. Обычно выходные переменные системы выбрать нетрудно, так как они определяются уже в процессе формулировки целей исследования. Чем меньше входных переменных, тем легче процесс исследования. Однако, если входных переменных слишком мало, модель РЭС может стать неадекватной реальности (см. п. 2.3.2), если слишком много, – из-за недостаточных аппаратных ресурсов ЭВМ или сложности вычислительных процедур машинная имитация оказывается нереализуемой.
Если некоторые первоначально выбранные подсистемы оказываются чрезмерно сложными, каждую из них расчленяют (с сохранением связей) на конечное число более мелких подсистем нижнего уровня. Процедуру расчленения подсистем продолжают до получения таких подсистем, которые в условиях данной задачи будут признаны достаточно простыми и удобными для непосредственного математического описания. Подсистемы, не подлежащие дальнейшему расчленению, являются, как это сказано выше, элементами сложной системы. Таким образом, в общем случае сложное РЭС является многоуровневым, состоящим из взаимосвязанных элементов, объединяемых в подсистемы различных уровней.
Использование понятия многоуровневого РЭС существенно расширяет возможности формального описания и моделирования. При этом объекты большой сложности становятся предметом системного анализа, точного математического расчета. Они могут быть подвергнуты (с помощью ЭВМ) различным количественным исследованиям.
При исследовании РЭС, состоящих из отдельных функциональных блоков, возможны два подхода в зависимости от назначения РЭС:
Структурный подход – исследование внутреннего строения блока. В этом случае должен быть отражен механизм взаимодействия узлов, элементов
идеталей рассматриваемого блока; должны быть исследованы как внутренняя структура блока, так и функционирование его элементов. Этот подход должен применяться тогда, когда задачей исследования является, например, проверка структуры блока, правильности взаимодействия его частей и общей
29
логики работы РЭС. Критерием правильности структуры блока является выполнение блоком заданной в ходе исследования функции.
Функциональный подход – исследование функции блока. В этом случае блок рассматривается как «черный ящик», его внутренний механизм может не изучаться; задается лишь передаточная функция блока в целом. Этот подход применим к тем блокам, внутреннее содержание которых не описывается в данном исследовании. Такие блоки рассматриваются как неделимые элементы РЭС.
Выбор того или иного подхода к исследованию функциональных блоков зависит от поставленной задачи. В ряде случаев моделирующий алгоритм бывает настолько сложным для реализации с помощью имеющихся в наличии вычислительных средств, что требуется изменить формулировку исходной задачи исследования для упрощения математического описания. Это упрощение часто достигается путем сокращения полноты описания РЭС при исключении из него части параметров или взаимодействий исследуемого объекта.
Рассмотрим пример структуризации РЭС на примере электронных часов с индикацией часов, минут и секунд [4].
Структуризацию системы начнем с рассмотрения электронных часов в виде «черного ящика» (рисунок 2.14). К входным параметрам системы относятся тактовые импульсы CLOCK с периодом 1 с. Управляющие параметры системы – сигнал сброса RESET. Возмущающие параметры системы - внешние воздействия (температура, давление, влажность и т.д.), а также напряжение питания +5 В. К выходным параметрам системы относится шестиразрядное двоично-десятичное число в формате XX:YY:ZZ, которое соответствует показаниям часов, минут и секунд. В данной системе для упрощения анализа сделаны следующие допущения:
- при дальнейшем анализе возмущающие воздействия не рассматрива-
ются;
- каждый разряд двоично-десятичного числа формируется четырехразрядной шиной.
Данная система состоит из трех компонентов (рисунок 2.15) – часовой счетчик Х1, минутный счетчик Х2 и секундный счетчик Х3. Если продолжить процесс декомпозиции, то на третьем иерархическом уровне можно выделить схемы электрические принципиальные часового, минутного и секундного счетчиков (рисунок 2.16, 2.17). Отметим, что структурный состав компонентов Х2 и Х3 идентичный. На четвертом иерархическом уровне располагается схема электрическая принципиальная счетчика 0-5 (рисунок 2.18). Таким образом, в процессе декомпозиции выяснилось, что РЭС «электронные часы» обладает четырьмя иерархическими уровнями.