

1284
.pdf90
А
0 |
|
0 |
|
|
|||
|
а) |
|
б) |
jQ
= |
|
Pi =0 |
0 |
|
P |
|
|
Qi Ai
в)
Рисунок 2.46 – Амплитудно-частотная (а), фазо-частотная (б) и ампли- тудно-фазовая (в) характеристики
Рассмотрим временные и частотные характеристики основных динамических звеньев.
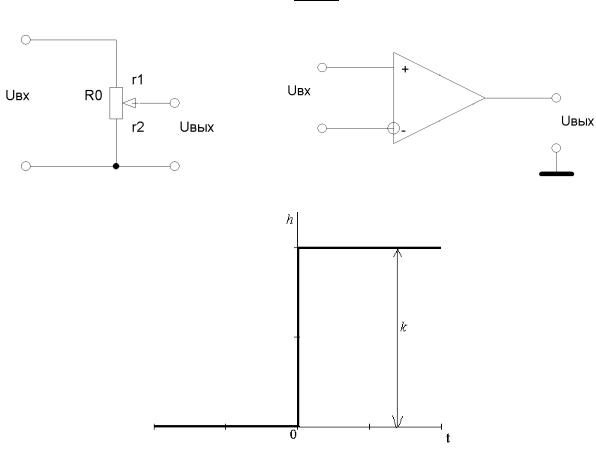
Безынерционное звено описывается уравнением:
хвых = k хвх,
где k – коэффициент передачи (усиления) звена. Передаточная функция этого звена постоянна:
W(p) = k.
К безынерционным звеньям можно отнести (рисунок 2.47, а, б) делитель напряжения, операционный усилитель, постоянная времени которого пренебрежимо мала, и т.д. Переходная функция безынерционного звена явля-
ется ступенчатой (рисунок 2.47, в): xвыx = h(t) = kl(t).
Фазовые сдвиги в безынерционном звене отсутствуют при любой частоте входного сигнала, т.е. = 0. Поэтому ФЧХ этого звена совпадает с осью частот и, следовательно, может не учитываться при расчетах.
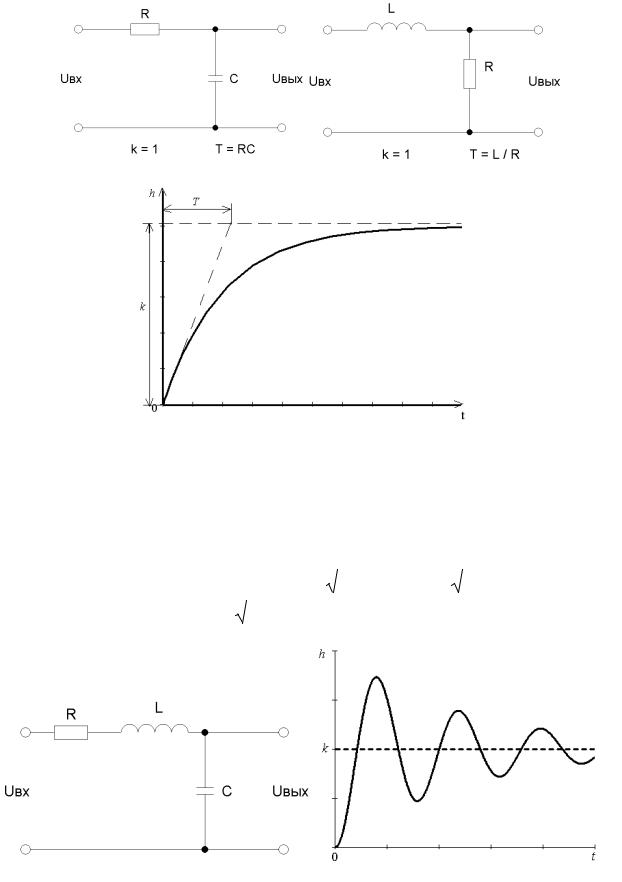
Апериодическое звено описывается уравнением:
(Tp + 1) хвых = k хвх,
где Т – постоянная времени звена.
Передаточная функция этого звена записывается как:
91
W ( p) |
k |
|
1 Tp . |
(2.11) |
а) |
б) |
в)
Рисунок 2.47 – Примеры безынерционных звеньев
Примерами такого типа звена могут быть RC- и RL-цепи, изображенные на рисунке 2.48, а, б. Переходная функция апериодического звена описывается уравнением экспоненты (рисунок 2.48, в):
|
|
|
1 |
|
x |
h(t) k 1 |
eT |
. |
|
вых |
|
|
|
|
|
|
|
|
|
Величина отрезка, отсекаемая на асимптоте касательной к экспоненте при t = 0, равна постоянной времени Т. Причем касательную можно провести из любой точки экспоненты, перенося в эту же точку начало координат. Практически время переходного процесса считается равным примерно трем
постоянным времени, т.е. tП 3T, а в более точных расчетах tП = 4T 5T.
Колебательное звено описывается дифференциальным уравнением:
(T2p2 + 2сTp + 1) хвых = k хвх,
где с – параметр затухания, 0 < с < 1. Передаточная функция этого звена:
W ( p) |
|
k |
|
|
|
. |
|
1 2сTp T 2 p2 |
|||
92
а) |
б) |
в)
Рисунок 2.48 – Примеры апериодических звеньев
Примером колебательного звена могут быть RLC-цепи (рисунок 2.49, а). Переходная функция колебательного звена (рисунок 2.49, б) описывается выражением:
|
|
|
|
ct |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 c |
2 |
|
|
1 c |
2 |
|
|||||||
|
T |
|
|
|
|||||||||||||||
|
|
e |
|
|
|
|
|
|
|
|
|
||||||||
xвых h(t) k 1 |
|
|
|
|
|
|
|
sin |
|
|
|
|
t arctg |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||
|
|
1 c |
|
|
|
T |
|
|
|
|
c |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
б) |
Рисунок 2.49 – Примеры колебательных звеньев
93
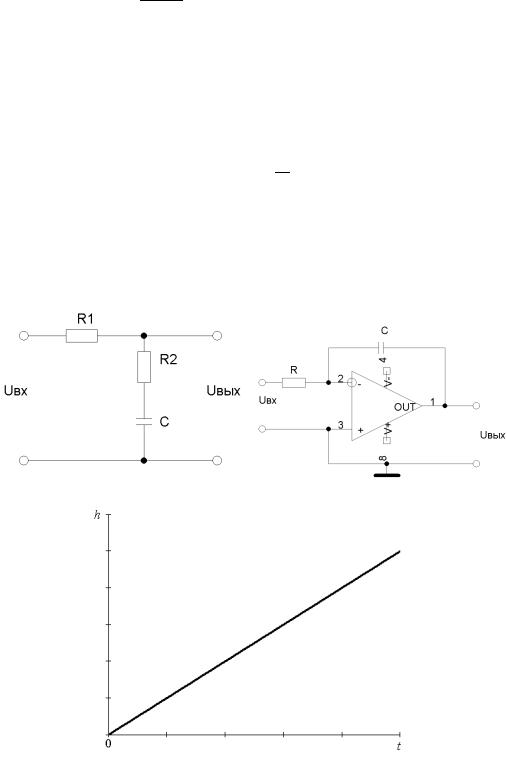
Интегрирующее звено описывается дифференциальными уравнениями:
dxвых kxвх или pxвых = kxвх.
dt
Выходной параметр можно определить из уравнения с помощью интегрирования:
t
xвых k xвх dt .
0
Передаточная функция этого звена записывается как:
W ( p) kp .
К интегрирующим звеньям можно отнести примеры, приведенные на рисунке 2.50, а, б: RС-цепь, интегрирующий операционный усилитель и т. д. Переходная функция рассматриваемого звена (рисунок 2.50, в) записывается как:
хвых = h(t) = kt.
а) |
б) |
в)
Рисунок 2.50 – Примеры интегрирующих звеньев
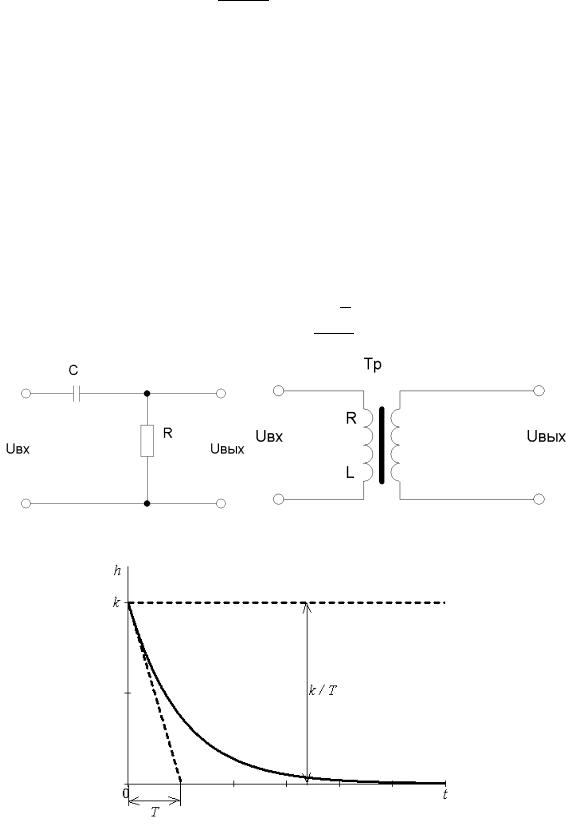
Дифференцирующее звено описывается уравнениями:
94
xвых kdxвых или xвых = kpxвх.
dt
Передаточная функция этого звена записывается как:
W(p) = kp. (2.12)
Дифференцирующие звенья с такой передаточной функцией называются идеальными. Реально дифференцирующие звенья чаще всего применяются в системах управления в качестве корректирующих цепей и имеют в большинстве случаев передаточную функцию следующего вида:
W ( p) |
|
kp |
|
|
|
. |
|
1 Tp |
|||
К таким звеньям можно отнести (рисунок 2.51, а, б) дифференцирующие RС-цепи, дифференцирующие трансформаторы и т.д. Переходная функция реального дифференцирующего звена описывается выражением (рисунок
2.51, в):
t
xвых h(t) ke T . T
а) |
б) |
в)
Рисунок 2.51 – Примеры дифференцирующих звеньев
95
Нетрудно заметить, что реальное дифференцирующее звено представляет собой два последовательно включенных звена: идеальное дифференцирующее (2.12) и апериодическое (2.11).
Из рассмотренных типовых звеньев элементарными являются безынерционное, интегрирующее и дифференцирующее. Все другие звенья можно сформировать из элементарных путем соответствующего соединения их между собой.
Звенья, у которых переходная функция со временем затухает, называются устойчивыми. Типовые звенья всегда устойчивы. Их действие описывается линейными дифференциальными уравнениями с положительными коэффициентами. Исключение составляет интегрирующее звено, которое, исходя из условий устойчивости, называют нейтральным. В неустойчивых звеньях переходный процесс является расходящимся. Действие этих звеньев описывается линейными дифференциальными уравнениями с отрицательными коэффициентами. Примерами неустойчивых звеньев являются звенья с передаточными функциями:
W ( p) |
|
k |
|
W ( p) |
|
k |
|
W ( p) |
|
k |
||
|
|
; |
|
|
; |
|
|
. |
||||
1 Tp |
1 Tp |
|||||||||||
1 2сTp T 2 p2 |
||||||||||||
Для устойчивых и неустойчивых звеньев одного типа АЧХ одинаковы, а ФЧХ различны. На одной и той же частоте вынужденных колебаний сдвиг фаз в устойчивом звене по абсолютной величине меньше, чем в неустойчивом, поэтому устойчивые звенья являются минимально-фазовыми, а неустойчивые – неминимально-фазовыми. Важно также отметить, что ФЧХ типовых звеньев не зависит от коэффициентов передачи этих звеньев.
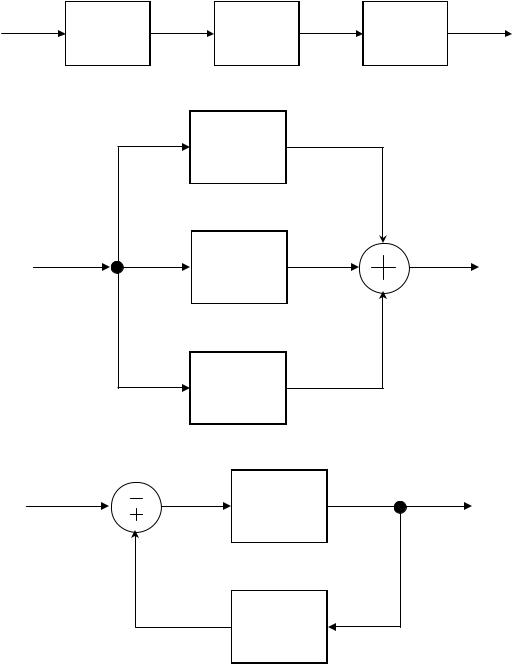
При исследовании системы управления ее можно разбить на комбинацию динамических звеньев с определенными передаточными функциями. В простейшем случае считается, что динамические звенья направленные и независимые, т.е. такие, сигналы которых проходят только от входа к выходу. Подключение последующих звеньев не влияет на характер переходных и устанавливающихся процессов в предыдущих звеньях. Следовательно, исходные уравнения звеньев и их передаточные функции останутся неизменными. В системах управления используются следующие соединения динами-
ческих звеньев: последовательное, параллельное и соединение обратной связью.
При последовательном соединении звеньев (рисунок 2.52, а) выходной сигнал предыдущего звена является входным сигналом последующего. Результирующая передаточная функция равна произведению передаточных функций отдельных звеньев:
W(p) = W1(p) W2(p) W3(p) …
или
n |
|
W ( p) Wi ( p) . |
(2.13) |
i 1
96
При параллельном соединении (рисунок 2.52, б) на вход всех звеньев подается общий сигнал, на выходе образуется сигнал, являющийся суммой выходных сигналов звеньев. Результирующая передаточная функция равна сумме передаточных функций звеньев:
W(p) = W1(p) + W2(p) + W3(p) …
или
n |
|
W ( p) Wi ( p) . |
(2.14) |
i 1
При соединении обратной связью (рисунок 2.52, в) выходной сигнал первого звена является входным для второго. Причем входной сигнал первого звена образуется в результате сложения или вычитания входного и выходного сигналов второго звена. Результирующая передаточная функция будет описываться выражением:
W ( p) |
|
W1( p) |
|
. |
(2.15) |
|
1 W ( p) W ( p) |
||||
|
1 |
2 |
|
|
|
Знак минус в этой формуле ставится при положительной обратной связи, т.е. при сложении сигналов, а знак плюс – при отрицательной обратной связи, т.е. при вычитании сигналов. Если второе звено отсутствует в цепи обратной связи, то передаточная функция примет вид:
W ( p) |
|
W1( p) |
|
|
|
. |
|
1 W ( p) |
|||
|
1 |
|
|
Для систем управления с комбинированным включением звеньев следует использовать формулы (2.13) – (2.15).
Для составления дифференциальных уравнений, которые характеризуют процессы в системах управления, требуется разделить систему на типовые звенья с определенной комбинацией их включения, т.е. составить структурную схему. Количество типовых звеньев, к которым сводится система управления, определяется необходимой точностью ее описания. Например, при наличии двух разных апериодических звеньев с разными постоянными времени, в случае отличия последних друг от друга на порядок или более, можно заменить их одним апериодическим звеном с большей постоянной времени. Если же необходимо уточнить расчет, то следует отказаться от этого упрощения и включить в структурную схему оба исходных апериодических звена. В большинстве случаев системы управления можно привести к последовательному соединению типовых звеньев, образующему замкнутую цепь. Такие системы управления называются одноконтурными. Другие системы управления приводятся к комбинации последовательно и параллельно соединенных типовых звеньев и называются многоконтурными.
97
х1 вх |
х1 вых = х2 вх |
х2 вых = х3 вх |
х3 вых |
W1(p) |
W2(p) |
|
W3(p) |
х вх
х вх
а)
х1 вых
W1(p)
х2 вых
W2(p)
х3 вых
W3(p)
б)
х
W1(p)
х ос
W2(p)
в)
х вых
х вых
Рисунок 2.52– Способы соединения звеньев системы
Многоконтурная система путем преобразований может быть приведена к эквивалентной одноконтурной.
После составления структурной схемы системы управления реальные элементы этой системы, представленные в виде комбинации типовых звеньев, могут быть описаны дифференциальными уравнениями, которые отражают связь между выходным и входным сигналами этих звеньев. Общее число таких уравнений будет соответствовать числу звеньев или, что то же самое, числу переменных, характеризующих систему управления. Из составленной
98
системы уравнений звеньев необходимо исключить все зависимые переменные, кроме одной. Удобнее это начинать с уравнения для последнего звена системы. Затем подставляют полученные значения переменных и их производных в дифференциальные уравнения предыдущих звеньев. Таким образом, дойдя до первого звена системы управления, получают дифференциальное уравнение с одной переменной, при этом порядок уравнения будет соответствовать числу переменных в системе управления. Обычно звенья в структурной схеме располагаются так, чтобы оставшаяся переменная характеризовала отклонение управляемой величины.
Следует заметить, что в зависимости от сигналов, принятых за входной и выходной, а также от принятых при составлении дифференциальных уравнений допущений один и тот же элемент системы управления можно описать разными уравнениями, а значит, и отобразить различными типовыми звеньями.
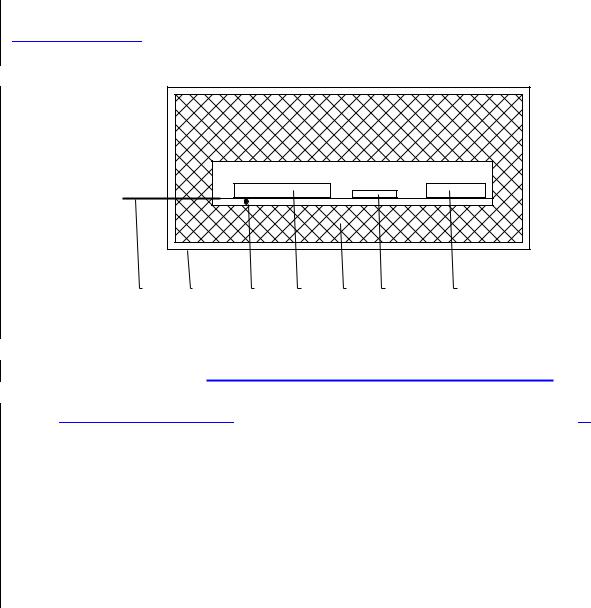
Пример анализа системы автоматического регулирования теплового режима микротермостата [6]. По конструктивным признакам микротермо- стат является подогревным, одноконтурным, в интегральном гибриднопленочном исполнении (рисунок 2.53) [14].
1 |
2 |
3 |
4 |
5 |
6 |
7 |
1 - выводы; 2 - корпус; 3 - термостатируемая подложка; 4 - термостатируемые ЭРЭ; 5 - теплоизоляция; 6 - нагреватель; 7 – датчик
Рисунок 2.53 - Гибридно-пленочный микротермостат
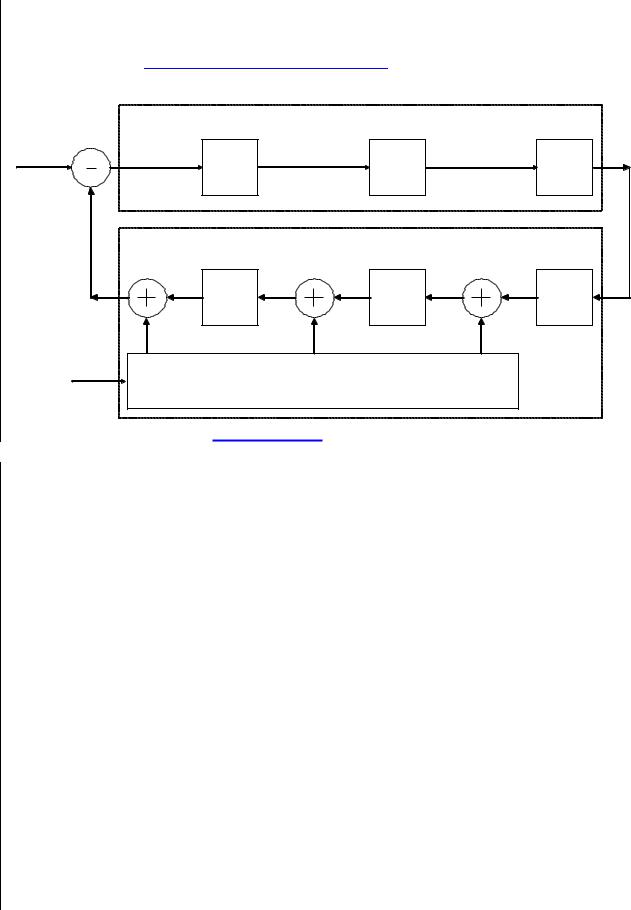
Структурная схема системы автоматического регулирования (САР) теплового режима микротермостата (рисунок 2.54), представляет собой совокупность электрической и тепловой подсистем. САР подвержена влиянию
внешних воздействий: задающему сигналу по температуре статирования ТЗАД
и возмущающему воздействию температуры среды ТСР. Электрическая подсистема - это схема регулирования температуры, состоящая из трех последовательных звеньев: датчика Д, усилителя УС, нагревателя Н. Тепловая подсистема включает три последовательных звена и параллельное им четвертое звено, которые соответствуют основным конструктивным элементам микро-
99
термостата: датчику Д, термостатируемой подложке П, нагревателю Н, корпусу К. Работа системы направлена на поддержание постоянства температу-
ры подложки ТП (объекта термостатирования).
ЭЛЕКТРИЧЕСКАЯ ПОДСИСТЕМА
ТЗАД |
ТД |
UД (T) |
PН |
|
|
UВХ_Н |
|
|
Д |
УС |
Н |
|
|
ТЕПЛОВАЯ ПОДСИСТЕМА |
|
||
Т Д |
ТД |
Т П |
Т П |
Т Н |
ТН |
|
Д |
|
|
П |
Н |
|
ТК_1 |
|
ТК |
|
ТК_3 |
ТСР |
|
|
|
|
|
|
|
|
К |
|
|
Рисунок 2.54 - Структурная схема микротермостата
Найдем передаточную функцию рассматриваемой САР. Для электрической подсистемы передаточная функция равна произведению передаточных функций отдельных звеньев:
WЭ(р) = WД_Э(р) WУС(р) WН_Э(р),
где WД_Э(р), WУС(р), WН_Э(р) - передаточные функции соответственно для датчика, усилителя, нагревателя в электрической подсистеме.
Для нахождения передаточной функции тепловой подсистемы воспользуемся правилом переноса воздействий из одной точки в другую [13]. После соответствующего преобразования тепловой подсистемы ее передаточная функция равна:
WТ(р) = WК(р)+WК(р) WД_Т(р)+
WК(р) WД_Т(р) WП(р)+WН_Т(р) WП(р) WД_Т(р),
где WН_Т(р), WП(р), WД_Т(р) - передаточные функции соответственно для нагревателя, подложки, датчика в тепловой подсистеме.
Результирующая передаточная функция САР равна произведению передаточных функций электрической и тепловой подсистем, с учетом того, что тепловая подсистема является контуром обратной связи:
WмзЩ ( p) |
|
WЭ ( p) |
|
|
WЭ ( p) WТ ( p) |
||
1 |
|
||