

МУ ЛР
.pdfгде |
0т |
|
|
у ст М пер.т |
|
|
|
|
|
|
|
|
- угловая скорость идеального холо- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стого хода на |
участке торможения |
|||
|
|
М пер.т М нач.т |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
противовключением по линеаризиро- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ванной механической характеристике, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рад/с; |
|
|
kcт |
|
|
|
у ст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- коэффициент |
пропорциональности |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
линеаризированной механической ха- |
|||
|
|
М пер.т М нач.т |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
рактеристики на участке торможения |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
противовключением, рад/(Н·м·с). |
|
|
M нач.т |
|
M к |
|
|
|
|
|
|
|
|
2 q |
|
|
- начальное значение момента АД на |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
участке торможения противовключе- |
|||||||
|
|
2 |
sу ст |
|
|
|
sкт |
|
q нием, Н·м; |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
sкт |
|
s |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
у ст |
|
|||||||||||
|
M пер.т |
|
M к |
|
|
|
|
2 q |
|
|
|
|
|
|
- значение момента АД на участке |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
торможения противовключением, при |
||||||
|
|
|
1 |
|
sкт |
|
q |
|
|
котором отключается двигатель, Н·м. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
sкт 1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где
нием
где
Следовательно |
|
|
||||||||
T |
|
d |
|
, |
|
|||||
|
|
|
|
|||||||
мт |
|
|
dt |
у ст.т |
|
|||||
|
|
|
|
|
||||||
Tмт |
|
|
|
kcт J |
|
- электромеханическая постоянная |
времени |
|||
|
kc kcт 1 |
электропривода на участке торможения проти- |
||||||||
|
|
|
||||||||
|
|
|
вовключением, с; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
у ст.т |
|
|
|
0т |
|
- установившееся значение угловой |
скорости |
|||
|
kc kcт 1 |
электропривода на участке торможения проти- |
||||||||
вовключением, рад/с.
Координаты электропривода на участке торможения противовключе-
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(t) у ст у ст.т e |
|
Tмт |
у ст.т; |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||||
|
(t) I |
|
|
|
|
|
e |
|
|
|
|||||||||||
I |
|
|
I |
|
|
|
I |
|
|||||||||||||
|
|
Tмт |
; |
||||||||||||||||||
2 |
|
|
|
|
2нач.т |
|
2 у ст.т |
|
|
|
|
|
|
|
|
|
2 у ст.т |
|
|||
M (t) M |
|
|
|
|
|
e |
|
t |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
, |
|||||||||||
нач.т |
M |
у ст.т |
Tмт |
M |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у ст.т |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М у ст.т kc у ст.т |
|
|
|
|
|
|
|
|
|
|
- установившееся значение момента элек- |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тродвигателя на участке торможения про- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тивовключением, Н·м; |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
начальное значение фазного приведен- |
|
I |
|
|
|
M нач.т 0 (2 sу ст) |
|
|
|||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
ного тока ротора на участке торможения |
||||||||||||||||||
|
|
3(r |
R R R ) |
|
|||||||||||||||||
2нач.т |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
p |
|
1 |
|
2 |
|
|
|
т |
|
противовключением, А. |
|||||
51
I |
|
|
|
M у ст.т (0 у ст.т) |
||
|
|
3(r R R |
R ) |
|||
2 у ст.т |
|
|
||||
|
|
|
|
|
||
|
|
|
|
|
p 1 2 |
т |
За время |
|
|
||||
tт |
Tмт |
ln |
у ст.т у ст |
|
||
у ст.т |
|
|||||
|
|
|
|
|
|
|
- установившееся значение фазного приведенного тока ротора на участке торможения противовключением, А.
фазный приведенный ток ротора уменьшится до значения
|
I |
|
|
|
|
|
|
M пер.т 0 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
2пер.т |
|
|
3(r R R |
|
R ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
p |
|
1 2 |
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
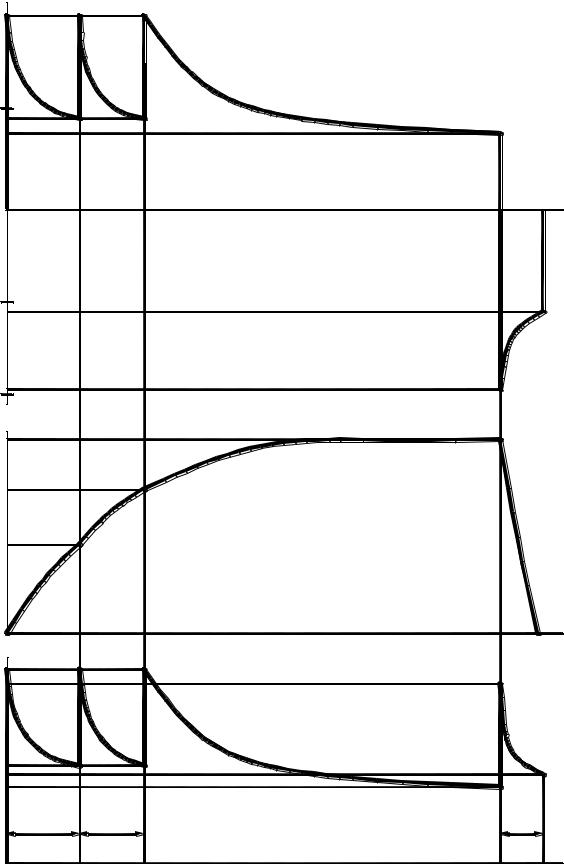
На рисунке 13 представлена диаграмма движения электропривода с |
||||||||||||||||||||||||||||||||||||||||||
АД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СОДЕРЖАНИЕ ОТЧЕТА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
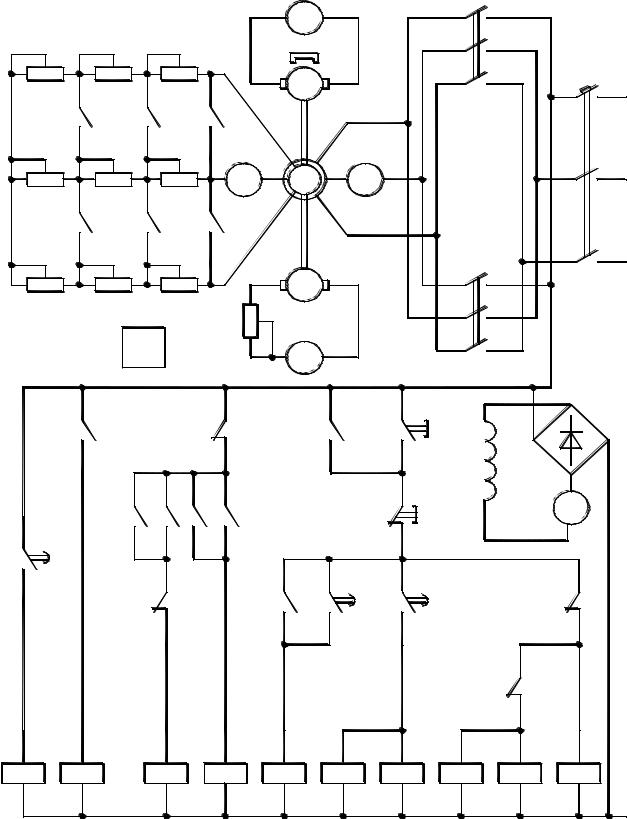
|
Схема установки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Перечень элементов схемы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Зависимости |
f |
t |
, |
M f |
|
t |
|
и |
I |
f t |
|
при заданном значении |
|||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
3 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
коэффициента kс . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f t |
|
M f t |
|
|
|
|
f t |
|||||||||||||||||||
|
Экспериментальные |
зависимости |
|
|
, |
|
и |
I |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
3 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
при заданном значении коэффициента kс . |
|
|
|
f t |
|
M f t |
|
|
|
|
f t |
|||||||||||||||||||||||||||||||
|
Экспериментальные |
зависимости |
|
|
, |
|
и |
I |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
3 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
при большем, чем заданное, значении коэффициента kс . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
Экспериментальные |
зависимости |
|
|
f |
t |
, |
M f t |
|
и |
I |
f t |
||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
3 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
при меньшем чем заданное, значении коэффициента kс , |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
Краткий анализ результатов. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
КОНТРОЛЬНЫЕ ВОПРОСЫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Как строились зависимости |
f |
|
t |
, |
M f |
|
t |
и |
|
I f |
|
t |
? |
|
|
|
|||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
3 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Как |
определялись |
|
экспериментальные |
|
|
зависимости |
f1 t , |
||||||||||||||||||||||||||||||||||
M f |
|
t |
и |
I |
f |
|
t |
при различных значениях коэффициента |
k |
|
? |
|
|
|
|
|||||||||||||||||||||||||||
|
2 |
|
2 |
|
|
3 |
|
|
с |
|
|
|
|
|||||||||||||||||||||||||||||
|
Как объяснить вид зависимостей |
f |
t |
, |
M f |
|
t |
|
и |
|
I f |
|
t |
при |
||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
3 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
различных значениях коэффициента kс ?
52
|
|
|
|
15 |
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
3~50 Hz, |
|
|
|
|
|
|
|
|
380 V |
|
RT |
R1 |
R2 |
|
G2 |
|
KM1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
КМТП КМУ1 КМУ 2 |
|
|
|
|
|||
RT |
R1 |
R2 |
A2 |
M |
A1 |
|
|
|
КМУ 2 |
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
КМТП |
КМУ1 |
|
|
|
KM2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G1 |
|
|
F |
|
|
|
|
|
|
|
|
|
|
RT |
R1 |
R2 |
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
A3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VD1 VD4 |
|
KM2 |
KV2 |
KM1 |
|
SB1 |
|
|
||
|
|
|
|
|
||||
20 |
|
KV1 |
|
|
|
|
G1 |
10 |
|
|
|
KM1 |
|
SB2 |
A4 |
|
|
|
KM2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
KTT |
|
|
КМУ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KV1 |
|
|
|
|
|
|
|
KM1 |
|
|
|
|
KM2 |
|
|
|
|
|
|
|
KT2 |
KT1 |
|
|
|
|
|
|
|
|
КМУ 2 |
|
|
|
|
|
|
|
|
|
N |
|
KV2 |
KTT |
KM2 |
KV1 |
КМУ 2 KT2 |
КМУ1 KT1 КМТП KM1 |
|
||
|
Рисунок 11 - Схема установки для управления |
|
|
|||||
|
|
пуском и торможением электропривода с АД |
|
|
||||
|
|
|
|
15 |
|
|
|
|
|
|
|
|
53 |
|
|
|
|
е |
|
|
2 0 |
s s |
|
|
|
|
|
|
sуст |
sуст |
|
|
|
|
|
|
|
sуст.2 |
|
|
|
|
|
|
|
|
sуст.1 |
|
|
|
|
|
|
|
|
|
sпер2 |
|
|
г |
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
sке |
|
|
|
|
|
|
|
|
sпер1 |
|
|
б |
в |
|
|
Mнач.т |
M пер.т |
sк2 |
|
|
|
|
|
Mк |
Mуст.т |
|
|
|
а |
M |
||
|
|
|
|
|||||
|
|
|
1 1 |
|
|
|||
- 2M ном |
|
- Mном |
|
Mном |
M2 |
|
M1 |
|
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
Mс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M уст.2 |
|
|
|
|
|
|
|
|
Mуст.1 |
|
|
|
|
|
|
sк1 |
|
|
|
|
|
|
|
|
|
sуст |
.т |
|
|
|

 0 2
0 2
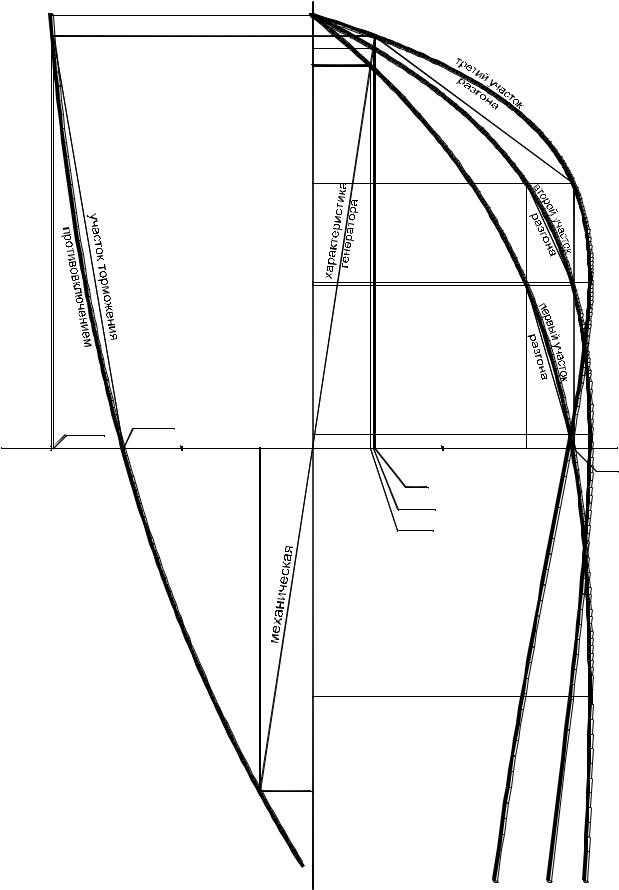
Рисунок 12 - Механическая характеристика электропривода с АД
54
|
M1 |
M |
|
|
|
|
2Mнoм |
|
|
|
|
|
Mнoм |
|
|
|
|
|
M2 |
|
|
|
|
|
M уст |
|
|
|
|
|
|
0 |
|
|
t |
|
|
|
|
|
|
|
- Mнoм |
|
|
|
|
|
Mпер.т |
|
|
|
|
|
Mнач.т |
|
|
|
|
|
- 2Mнoм |
|
|
|
|
|
уст |
ω |
|
|
|
|
|
|
|
||
30 |
пер2 |
|
|
|
|
|
|
|
|
10 |
|
|
пер1 |
|
|
||
|
|
0 |
|
|
t |
|
|
|
|
|
|
|
I |
I |
|
|
|
|
2 |
|
|
||
|
|
|
|
||
|
I |
21 |
|
|
|
|
2 нaч.т |
|
|
|
|
|
I |
|
|
|
|
2.8 |
I |
22 |
|
|
|
2 пер.т |
|
|
|
||
I |
|
|
|
||
|
2с |
tp1 |
tp2 |
tT |
|
|
|
|
|||
|
|
|
|
|
t |
|
|
|
Рисунок 13 - Диаграмма движения электропривода с АД. |
|
|
55
6 Лабораторная работа 05.14. Исследование пусковой диаграммы электропривода с двигателем постоянного тока независимого возбуждения и упругим валопроводом
ОБЩИЕ ПОЛОЖЕНИЯ
Управление разомкнутыми электроприводами заключается в осуществлении пуска, регулирования угловой скорости, торможения, реверсирования. При этом используются пусковые и регулировочные резисторы. Регулирование динамических характеристик электропривода в режиме пуска только за счет изменения сопротивления пускового резистора не всегда позволяет удовлетворить требованиям, предъявляемым технологическим процессам. Например, в электроприводах крановых механизмов имеет место раскачивание груза.
Предлагается формировать режим пуска электропривода за счёт рационального выбора его параметров. При этом электропривод сможет разгоняться за минимально возможное время при заданном перерегулировании по угловой скорости механизма, что позволит интенсифицировать технологические процессы промышленных механизмов.
ЦЕЛЬ И ПРОГРАММА РАБОТЫ
Исследование пусковой диаграммы электропривода с двигателем постоянного тока независимого возбуждения и упругим валопроводом при четырёх варьируемых параметрах в целях приобретения навыков по определению рациональных значений активного сопротивления, индуктивности, момента инерции электродвигателя и жёсткости валопровода, обеспечивающих разгон электропривода за минимально возможное время при заданном перерегулировании по угловой скорости механизма.
Программа работы.
Ознакомление с описанием работы.
Исследование влияния параметров активного сопротивления, индуктивности, момента инерции электродвигателя и жёсткости валопровода на время пуска электроприводов и величину перерегулирования по угловой скорости механизма.
Оценка результатов исследований.
ОПИСАНИЕ РАБОТЫ
Предлагается формировать пусковую диаграмму электропривод за счёт рационального выбора его параметров. При этом электропривод сможет разгоняться за минимально возможное время при заданном перерегу-
56
лировании по угловой скорости механизма, что позволит интенсифицировать технологические процессы установок.
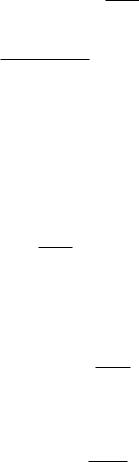
Математическая модель электропривода с двигателем постоянного тока независимого возбуждения (ДПТ НВ) и упругим валопроводом (УВ) при отсутствии момента сопротивления имеет вид:
U С R I L |
dI я |
; |
|||||||||
dt |
|||||||||||
|
ном |
e |
1 |
|
|
|
я |
|
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
d 1 |
|
|
|
|
|
См I я |
М у |
|
J1 |
|
; |
|
|
|||
|
dt |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||
|
dМ у |
|
|
|
|
|
|
|
|
|
|
|
Су 1 2 ; |
|
|
|
|||||||
|
dt |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
d w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
М у J2 |
|
, |
|
|
|
|
|
|||
|
dt |
|
|
|
|
|
|
||||
где Uном |
- номинальное напряжение, приложенное к якорной цепи элек- |
||||||||||
|
|
тродвигателя, В; |
|||||||||
1 |
- угловая скорость электродвигателя, рад/с; |
||||||||||
I я |
- ток якорной цепи электродвигателя, А; |
||||||||||
М у |
- упругий момент (момент на валопроводе), Н м ; |
||||||||||
2 |
- угловая скорость механизма, рад/с; |
||||||||||
Се |
- коэффициент электродвигателя, (В·с)/рад; |
||||||||||
R |
-сопротивление якорной цепи электродвигателя, Ом; |
||||||||||
L |
- индуктивность якорной цепи электродвигателя, Гн; |
||||||||||
См |
- коэффициент электродвигателя, В·с; |
||||||||||
J |
1 |
- момент инерции электродвигателя, кг·м2; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Су |
- жесткость валопрвода, |
Н м |
; |
||||||||
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
рад |
|
J |
2 |
- момент инерции механизма, кг·м2. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
При выборе рациональных значений варьируемых параметров в со- |
|||||||||||
ответствии с зависимостями: |
|||||||||||
L 0,381 |
R2 J |
2 |
; |
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
Р |
|
Сe См |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
1, 253 |
С2 |
С2 |
|||||||
С |
е |
|
|
м |
; |
||||||
R2 J |
|
||||||||||
|
УР |
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
J1Р 0,54 J2
разгон электропривода с ДПТ НВ и упругим валопроводом при отсутствии момента сопротивления осуществляется за минимально возможное время.
В момент времени tТ 0,3534 T
57
ток якорной цепи электродвигателя достигает максимального значения
I я max 0,6028 Uном ,
Rр
где T Rp J1 J2 ;
СeСм
Rp |
- рациональное значение сопротивления якорной цепи электро- |
|
двигателя, Ом; |
В момент времени tпуска 1,808 T
механизм достигает первый раз установившегося значения угловой скорости
уст Uном .
Се
В момент времени tс 3,158 T
угловая скорость механизма достигает максимального значения
2 max 1,050 Uном .
Се
Сопротивление якорной цепи электродвигателя при заданных значениях номинального напряжения и максимального тока равно
Rp 0,6028 Uном .
I я max
Таким образом, при выборе четырех параметров электропривода в соответствии с зависимостями, описанными выше, он разгоняется за время tпуска 1,808 T с перерегулированием угловой скорости механизма
2 5,0%.
Для проверки эффективности предложенного способа формирования пусковой диаграммы электропривода с упругим валопроводом и отсутствии момента сопротивления необходимо провести три серии экспериментальных исследований, в результате которых определить:
- зависимости времени пуска электропривода с упругим валопроводом tпуска и перерегулирования угловой скорости механизма 2 от индук-
тивности якорной цепи электродвигателя при рациональных значениях жёсткости валопровода и момента инерции электродвигателя;
- зависимости времени пуска электропривода с упругим валопроводом tпуска и перерегулирования угловой скорости механизма 2 от жёстко-
сти валопровода при рациональных значениях индуктивности якорной цепи электродвигателя и момента инерции электродвигателя;
58
- зависимости времени пуска электропривода с упругим валопроводом tпуска и перерегулирования угловой скорости механизма 2 от момента
инерции электродвигателя при рациональных значениях индуктивности якорной цепи электродвигателя и жёсткости валопровода.
Исследования необходимо провести при изменении варьируемых па-
раметров: от 0,7 LP до 1,3 LP с шагом 0,1 LP ; от 0,7 СУР до 1,3 СУР с ша-
гом 0,1 СУР ; от 0,7 J1P до 1,3 J1P с шагом 0,1 J1P .
По полученным в результате расчёта на ЭВМ с использованием программного продукта MATLAB пусковым диаграммам электропривода определить время пуска tпуска и перерегулирования по угловой скорости
механизма 2 . На всех пусковых диаграммах электропривода величина
максимального значения тока якорной цепи должна поддерживаться неизменной. Это достигается варьированием сопротивления якорной цепи электродвигателя.
На рисунке 14 представлена структурная схема электропривода с упругим валопроводом при отсутствии момента сопротивления.
Постройте зависимости времени пуска и перерегулирования по угловой скорости механизма:
-от индуктивности якорной цепи электродвигателя при постоянных жёсткости валопровода и момента инерции электродвигателя;
-жесткости валопровода при постоянных индуктивности якорной цепи электродвигателя и момента инерции электродвигателя;
-момента инерции электродвигателя при постоянных индуктивности якорной цепи электродвигателя и жесткости валопровода.
Электропривод выполнен на базе электродвигателя постоянного то-
ка, |
имеющего следующие |
|
|
параметры: Uном 220 В; |
Iя ном 4,35 А; |
|||||||||
|
157 |
рад |
; С 1,25 |
В с |
|
; С |
|
1,25 В с. |
|
|||||
|
|
м |
|
|||||||||||
ном |
|
|
|
с |
е |
|
|
рад |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
По последней цифре студенческого билета выберите значение мо- |
|||||||||||||
мента инерции механизма J2 : |
|
|
|
|||||||||||
1. |
J2 |
0,01 кг м2 ; |
6. |
|
J2 |
0,06 кг м2 ; |
|
|||||||
2. |
J2 |
0,02 кг м2 ; |
7. |
|
J2 |
0,07 кг м2 ; |
|
|||||||
3. |
J2 0,03 кг м2 ; |
8. |
|
J2 |
0,08 кг м2 ; |
|
||||||||
4. |
J2 |
0,04 кг м2 ; |
9. |
|
J2 |
0,09 кг м2 ; |
|
|||||||
5. |
J |
2 |
0,05 кг м2 ; |
10. |
J |
2 |
0,10 кг м2 ; |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Максимальное значение тока якорной цепи электродвигателя при электропривода принять равным Iя max 2Iя ном 8,7 А.
59
60
Рисунок 14 – Структурная схема электропривода с упругим валопроводом при отсутствии момента сопротивления