

МУ ЛР
.pdfМЕТОДИЧЕСКИЕ УКАЗАНИЯ
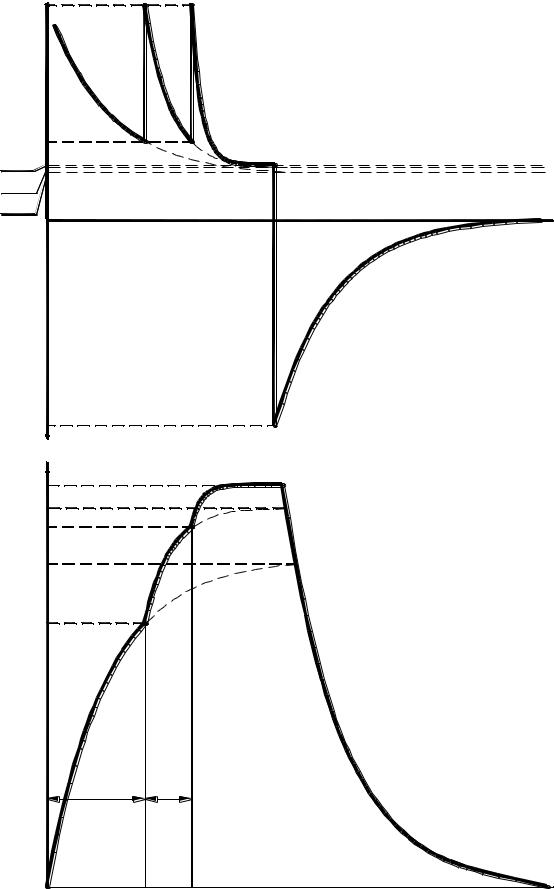
На рисунке 7представлены электромеханические характеристики электропривода с ДПТ НВ.
На первом участке разгона справедлива система уравнений |
|||||
U C R R R |
I ; |
||||
|
|
|
|
|
|
e |
я |
1 2 |
я |
||
См I я Kc J |
d |
, |
|
||
|
|
||||
dt |
|||||
|
|
|
|
||
где
Tм1
U |
- напряжение, подводимое к якорю двигателя, В; |
Ce |
- коэффициент пропорциональности между угловой скоростью |
|
двигателя и ЭДС его якоря, (В·с)/рад; |
- угловая скорость двигателя, рад/с;
|
|
Rя |
|
|
|
- сопротивление якорной цепи двигателя, Ом; |
|||||||||||||
|
|
R1 |
|
|
|
- первое добавочное сопротивление, включенное в якорную цепь |
|||||||||||||
|
|
|
|
|
|
|
двигателя, Ом; |
|
|
||||||||||
|
|
R2 |
|
|
|
- второе добавочное сопротивление, включенное в якорную цепь |
|||||||||||||
|
|
|
|
|
|
|
двигателя, Ом; |
|
|
||||||||||
|
|
Iя |
|
|
|
|
- ток якорной цепи двигателя, А; |
||||||||||||
|
|
См |
|
|
|
- коэффициент пропорциональности между током якорной цепи и |
|||||||||||||
|
|
|
|
|
|
|
моментом двигателя, В·с; |
||||||||||||
|
|
Kc |
|
|
|
- коэффициент пропорциональности между угловой скоростью |
|||||||||||||
|
|
|
|
|
|
|
двигателя и моментом сопротивления, (Н·м·с)/рад; |
||||||||||||
|
|
J |
|
|
|
|
- момент инерции электропривода, кг·м2. |
||||||||||||
|
|
Из системы уравнений |
|
|
|||||||||||||||
|
|
Tм1 |
d |
|
у ст1, |
|
|
||||||||||||
|
|
|
|
|
|
||||||||||||||
dt |
|
|
|||||||||||||||||
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
- электромеханическая постоянная вре- |
|||
|
|
|
J Rя |
|
R1 |
R2 |
мени электропривода на первом участке разго- |
||||||||||||
|
|
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
на, с; |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
K |
c |
R |
я |
R R |
|
1 |
|
|
|||||||||||
|
|
|
|
|
|
1 |
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
CeСм |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
у ст1 |
|
|
|
|
|
0 |
|
- установившееся значение угловой ско- |
|||||||||
|
|
|
|
Kc Rя R1 R2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ce |
См |
рости электропривода на первом участке раз- |
||||||
|
|
|
|
|
|
|
|
|
|
|
гона, рад/с. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Координаты электропривода на первом участке разгона
t |
|
t |
|
|
|
|
Tм1 у ст1; |
|
|||||
у ст1 е |
|
|
||||
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
T |
I |
||
I я t I я макс I я у ст1 е м1 |
я у ст1, |
|||||
где |
|
|
|
|
|
- установившееся значение тока |
|
|
|
|
|
|
21 |

I |
|
Kc |
|
|
0 |
|
|
|
якорной цепи электропривода на первом |
||
|
|
|
|
|
|
|
|
|
|
|
участке разгона, А. |
|
я у ст1 |
|
См |
Kc Rя R1 R2 |
|
|
|
||||
|
|
|
1 |
||||||||
|
|
|
|
|
|
|
CeСм |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Время разгона на первом участке |
|||||||||
|
|
tр1 Tм1 |
ln |
у ст1 |
|
|
, |
|
|||
|
|
у ст1 пер1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|||
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
I |
я макс |
R |
я |
|
||
пер1 |
|
|
1 |
|
|
|
|
|
|||
Ce |
|
U |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
- значение угловой скорости при закорачивании первого добавочного сопротивления, рад/с.
Tм2
I я у ст2
|
На втором участке разгона справедлива система уравнении |
|||||||||||||||||||||||||||
|
U C |
|
R |
|
R |
|
I |
|
|
; |
|
|||||||||||||||||
|
|
|
|
|
|
|
e |
|
|
|
|
я |
|
|
|
2 |
|
|
|
|
|
я |
|
|
||||
|
См I я |
Kc J |
d |
|
. |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
dt |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Из системы уравнений |
|
||||||||||||||||||||||||||
|
Tм2 |
d |
|
у ст2, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- электромеханическая постоянная времени |
|||
|
|
|
J Rя |
|
R2 |
|
|
|
|
|
|
|
|
|
|
электропривода на втором участке разгона, с; |
||||||||||||
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Kc Rя R2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
CeСм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
у ст2 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
- установившееся значение угловой скоро- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сти электропривода на втором участке разгона, |
||||||||||||
|
|
Kc Rя R2 |
|
1 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
рад/с. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Координаты электропривода на втором участке разгона |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
t пер1 у ст2 е |
Tм2 у ст2; |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
I я t I я макс I я у ст2 е |
|
|
|
||||||||||||||||||||||||
|
T |
|||||||||||||||||||||||||||
|
|
|
м2 |
I я у ст2, |
||||||||||||||||||||||||
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- установившееся значение тока якор- |
|||
|
Kc |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
См |
|
Kc Rя R2 |
|
1 |
|
|
|
|
|
ной цепи электропривода на втором участке |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
разгона, А. |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Время разгона на втором участке
t |
|
T |
ln |
у ст2 |
пер1 |
, |
р2 |
|
|
||||
|
м2 |
у ст2 |
пер2 |
|
||
|
|
|
|
|||
где |
|
|
|
|
- значение угловой скорости при зако- |
|
|
|
|
|
|
|
22 |
пер2 |
|
U I я макс Rя |
|
|
|
|
|
|
|
|
|
|
рачивании второго добавочного сопротивле- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния, рад/с. |
||
|
|
Ce |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
На третьем участке разгона справедлива система уравнений |
|||||||||||||||||||
|
U Ce Rя I я ; |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
||
|
См I я Kc J |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
. |
|
|
|
|
|
||||||||||
|
|
|
dt |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Следовательно |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
T |
d |
|
|
|
|
, |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
м |
dt |
|
|
|
|
|
|
у ст |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
J Rя |
|
|
|
|
|
|
|
- электромеханическая постоянная времени |
||||
|
|
|
|
|
|
|
|
CeСм |
|
|
|
|
электропривода на третьем участке разгона, с; |
|||||||
|
где Tм |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Kc Rя |
|
|
1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
у ст |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
- установившееся значение угловой скоро- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сти электропривода на третьем участке разгона, |
||||||
|
|
Kc Rя |
|
1 |
|
|
рад/с. |
|||||||||||||
|
|
|
|
|
CeСм |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Координаты электропривода на третьем участке разгона |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
t пер2 у ст е |
Tм у ст; |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
I я t I я макс I я у ст е |
|
|
|
||||||||||||||||
|
|
|||||||||||||||||||
|
T |
|||||||||||||||||||
|
|
|
м |
I я у ст, |
||||||||||||||||
|
|
где |
|
|
|
|
|
|
I |
|
|
Kc |
|
|
|
0 |
|
я у ст |
См |
|
Kc |
Rя |
||||
|
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
CeСм |
||
- установившееся значение тока якорной цепи электропривода на третьем участке разгона, А.
|
|
|
Теоретически время разгона на третьем участке равно бесконечности. |
|||||||||||||
|
|
|
На участке динамического торможения справедлива система уравнений |
|||||||||||||
|
|
|
0 C R R |
|
I ; |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
я |
|
т |
|
|
я |
|||
|
|
|
См I я |
Kc J |
d |
. |
|
|||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
dt |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Следовательно |
|
|
|
|
|
||||||||
|
|
|
Tмт |
|
d |
0 , |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
dt |
|
|
|
|
|
|||||||
|
|
|
где |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
J Rя Rт |
|
|
|
|
- электромеханическая постоянная времени |
|||||||
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
|||
Tмт |
|
|
|
|
|
|
|
|
|
|
|
|
электропривода на участке динамического тор- |
|||
|
Kc |
Rя |
Rт |
1 |
|
|
|
|
можения, с. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
CeСм |
|
|
|
|
|
|
|
|
||
Координаты электропривода на участке динамического торможения
23

|
t у ст е |
||||
|
I я t I я нач.т. |
||||
|
где |
|
|
||
I я нач.т. |
|
|
Се |
|
|
Rя |
Rт |
||||
|
|
|
|||
|
t |
|
|
|
Tмт |
|
|||
|
; |
|
||
|
|
|
t |
|
|
|
|
||
|
|
|||
|
е |
Tмт , |
||
0
Kc Rя 1
CeСм
- начальное значение тока якорной цепи электропривода на участке динамического торможения, А.
Теоретически время динамического торможения равно бесконечности. На рисунке 8 представлена диаграмма движения электропривода с ДПТ
НВ.
СОДЕРЖАНИЕ ОТЧЕТА
Схема установки.
Перечень элементов схемы.
Зависимости f1 t и Iя f2 t при заданном значении коэффи- циента Kc .
Экспериментальные зависимости f1 t и Iя f2 t при заданном значении коэффициента Kc .
t и f2 t при большем,I яЭкспериментальные зависимости f1
чем заданное значение коэффициента Kc . |
f1 t |
|
I я f2 t |
|
|
|||||||||
|
Экспериментальные зависимости |
и |
при меньшем, |
|||||||||||
|
|
|
|
|
|
|
|
|||||||
чем заданное значение коэффициента Kc . |
|
|
|
|
|
|
|
|
|
|
|
|||
|
Краткий анализ результатов. |
|
|
|
|
|
|
|
|
|
|
|
||
КОНТРОЛЬНЫЕ ВОПРОСЫ |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Как строились зависимости |
f1 |
t |
и |
Iя f2 |
t |
? |
|
|
|
||||
|
|
|
|
|
|
|
|
|
f1 t и |
|||||
|
Как определялись экспериментальные |
зависимости |
|
|||||||||||
I я f2 |
t при различных значениях коэффициента |
Kc |
? |
|
|
|
|
|||||||
|
Как объяснить вид зависимостей |
|
f1 t |
|
и |
I я f2 |
t |
|
при различ- |
|||||
|
|
|
|
|
|
|
|
|
||||||
ных значения коэффициента Kc ?
24

|
|
1~50 Hz, 220 V |
|
|
|
|
||
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
VD1 VD4 |
|
|
|
|
|
|
V1 |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
КМУ1 |
|
КМУ 2 |
|
KM2 |
RT |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
M |
A3 |
1 |
KM1 |
2 |
R1 |
3 |
R2 |
4 |
|
6 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
G1 |
|
|
|
|
|
|
|
|
G2 |
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
V2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A4 |
|
Рисунок 5 - Схема установки для управления пуском |
|||||||
|
и торможением электропривода с ДПТ НВ. Силовые цепи |
|||||||
25

1 |
3 |
4 |
6 |
|
|
RУ 2 |
|
|
КМУ 2 |
|
|
RУ 1 |
|
|
КМУ1 |
SB1 |
SB2 |
KM2 |
|
|
|
|
|
KM1 |
|
KV |
KM1 |
|
|
KM2 |
KM1 |
KM2 |
|
|
|
KT |
KT |
|
|
|
|
KV |
Рисунок 6 - Схема установки для управления пуском и торможением электропривода с ДПТ НВ. Цепи управления
26

|
|
|
|
|
0 |
|
|
у ст |
27 |
|
|
|
|
I я |
Iя макс |
Iя нач.т |
Iя мин |
|
|
Рисунок 7 - Электромеханическая характеристика электропривода с ДПТ НВ |
I я макс 
Iя мин
Iя уст
Iя уст2
I |
я уст1 |
|
t |
|
|
||
|
|
0 |
|
Iя нач.т |
|
|
Iя макс |
|
|
уст |
0 |
|
|
|
|
уст2 |
|
|
пер2 |
|
|
уст1 |
|
|
пер1 |
|
|
|
t p1 |
tp2 |
0 |
|
t |
|
|
|
Рисунок 8 - Диаграмма движения электропривода с ДПТ НВ |
||
28
4 Лабораторная работа 05.10. Изучение и наладка схемы управления пуском и торможением электропривода с асинхронным двигателем
ОБЩИЕ ПОЛОЖЕНИЯ
Автоматизация пуска, реверса и торможения значительно облегчает управление электроприводами, устраняет возможные ошибки при их выполнении и ведет к повышению производительности механизмов, особенно при повторно-кратковременном режиме работы /1; 3/.
В работе предусматривается изучение и наладка схемы управления пуском в две ступени по принципу времени и торможение противовключением по принципу времени электропривода с асинхронным двигателем (АД).
При разработке данных методических указаний использовались методические указания к лабораторной работе № 05.21 «Исследование схемы автоматического управления пуском асинхронного двигателя с контактными кольцами» (составители Сибирский В.А., Добробаба Ю.П., Андреев Ю.П.).
ЦЕЛЬ И ПРОГРАММА РАБОТЫ
Цель работы - изучение и приобретение навыков наладки схем управления пуском и торможением электроприводов с АД.
Программа работы.
Ознакомление с описанием лабораторной работы и оборудованием установки.
Определение значений сопротивлений двух пусковых резисторов, резистора торможения, минимального момента двигателя и двух угловых скоростей электропривода, при которых закорачиваются пусковые резисторы, интервалов времени разгона по ступеням и торможения. (При расчете принять, что максимальное значение момента двигателя M1 не должно пре-
вышать 2Mном ).
Сборка и наладка схемы управления пуском и торможением электропривода с АД.
Экспериментальная проверка работоспособности схемы управления пуском и торможением электропривода с АД.
Оценка результатов экспериментальной проверки.
ОПИСАНИЕ УСТАНОВКИ
Схема установки для управления пуском и торможением электропривода с АД, представленная на рисунок 9, содержит: двигатель М, статорные цепи которого подключены через автоматический выключатель F, и главные контакты одного из контакторов KM1 или КМ2 к сети 3~50 Гц, 380 В; три
29
пусковых резистора первой ступени R1; три пусковых резистора второй ступени R2; три резистора торможения противовключением RТ; генератор постоянного тока G1, нагруженный на резистор R3; тахогенератор G2; пять контакторов KM1, KM2, КМУ1, КМУ2 и КМТП; три реле времени КТ1, КT2 и КТТ; два реле напряжения КV1 и KV2; две кнопки управления SB1 и SB2. Валы двигателя М, генератора G1 и тахогенератора G2 жестко соединены друг с другом. Обмотка возбуждения генератора G1 получает питание от выпрямителя однофазного тока VD1 VD4. Главные контакты контактора торможения противовключением КМТП закорачивают три резистора торможения противовключением RT. Главные контакты контактора ускорения КМУ1 закорачивают три пусковых резистора первой ступени R1. Главные контакты контактора ускорения КМУ2 закорачивают три пусковых резистора второй ступени R2.
Токи статора и ротора двигателя измеряются амперметрами A1 и А2. Для измерения тока нагрузки генератора G1 служит амперметр A3. Ток возбуждения генератора G1 измеряется амперметром А4. Напряжение, пропорциональное угловой скорости электропривода, снимается с обмотки тахогенератора G2, измеряется вольтметром V.
Переменный резистор R3 служит для регулирования тока генератора G1 (момента сопротивления электропривода).
Пуск двигателя осуществляется нажатием кнопки SB1, что приводит к срабатыванию контакторов KM1 и КМТП и реле времени КT1. Размыкающий контакт контактора KM1, разрывая цепь катушки контактора КМ2, осуществляет электрическую блокировку; главные контакты контактора KM1 подключают двигатель к сети; главные контакты контактора КМТП закорачивают три резистора RТ; замыкающий контакт контактора KM1 шунтирует кнопку SB1; другой замыкающий контакт контактора KM1 включает реле напряжения KV1. Замыкающий контакт реле напряжения KV1 шунтирует замыкающий контакт контактора KM1, другой замыкающий контакт реле напряжения подготавливает к включению цепь катушки контактора КМ2. Реле времени КТ1, отсчитав время, замыкает своим контактом цепи катушек контактора КМУ1 и реле времени КТ2. Главные контакты контактора КМУ1 закорачивают три резистора R1. Это вызывает увеличение тока ротора АД и ускорение процесса разгона. Реле времени КТ2, отсчитав время, замыкает своим контактом цепь катушки контактора КМУ2. Размыкающий контакт контактора КМУ2 отключит контактор КМТП и реле времени KT1, которое, в свою очередь, отключит контактор КМУ1 и реле времени КТ2; замыкающий контакт контактора КМУ2 шунтирует замыкающий контакт реле времени КТ2; главные контакты контактора КМУ2 закорачивают три резистора R2. Это вызывает увеличение тока ротора АД и ускорение процесса разгона. АД выходит на естественную характеристику и заканчивает свой разгон в точке установившегося режима. При этом главные контакты контакторов КМТП и КМУ1 разомкнуты.
30