

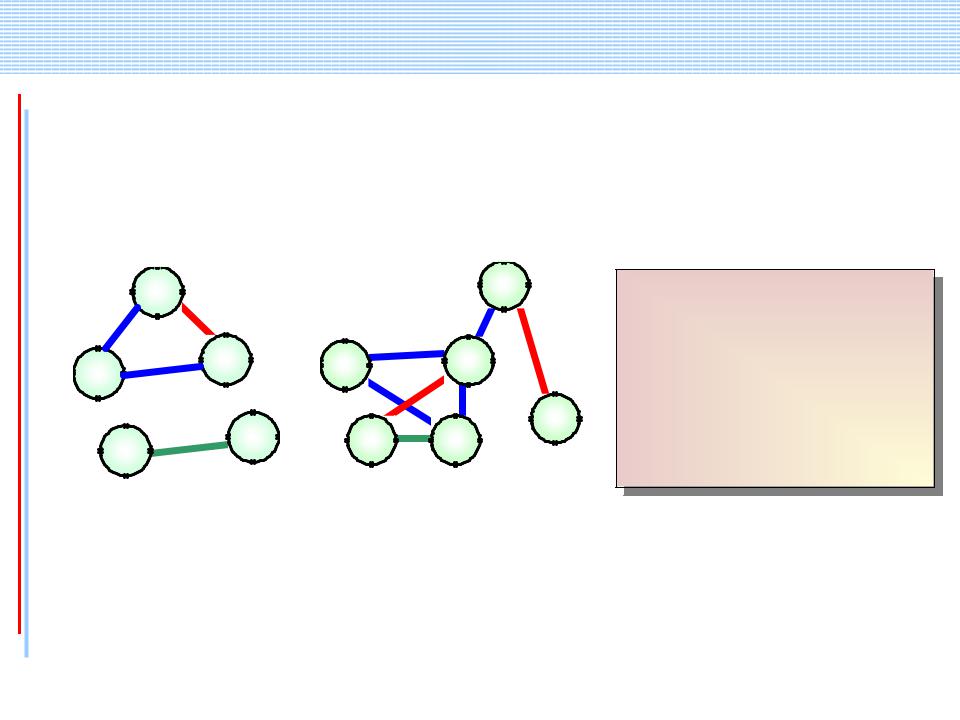
Концептуальное описание проблемы
Пример структурной динамики группировки АПО
|
An |
m |
|
|
|
An |
|
An – Активный Подвижный |
i |
|
|
|
|
i |
|
Объект с номером “n” |
|
|
|
|
i |
|
m |
m – материальные |
||
|
|
Aj |
Ak |
|
Ap |
|||
Ak |
i |
i |
m |
потоки |
||||
|
|
i |
|
e – энергетические |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
Aj |
потоки |
|
|
|
Ap |
|
Af |
|
Al |
||
|
Al |
|
e |
|
i – информационные |
|||
|
e |
|
|
|
|
|||
|
|
|
|
|
|
потоки |
||
|
t = ts |
|
|
|
|
t = ts+1 |
|
|
|
|
|
|
|
|
|
|
|
|
Потоковая |
|
|
|
|
|
|
|
|
интерпретация |
|
|
|
|
|
|
|
|
структурной динамики |
|
|
|
|
|
||
|
СлО |
|
|
|
|
|
|
|
СПИИ РАН |
62 |

ПОСТАНОВКА ПРОБЛЕМЫ ПРОАКТИВНОГО УПРАВЛЕНИЯ СлО
Необходимо разработать принципы, подходы, модели, методы, алгоритмы,
позволяющие находить такие программы проактивного управления функционированием и развитием СлО <U*t , S *t f >, при которых выполняются следующие условия:
|
|
|
|
|
|
|
|
|
J |
|
X t |
, t |
, Z t |
, F t |
|
, t |
~ ~ |
, t (t |
|
,t |
|
] |
|
extr |
|
, |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
, |
|
|
|
0 |
|
f |
|
|
|
U t ,S*t f g |
|
|
|
|
|
|
|
||||||||
|
|
|
t |
, S |
t f |
|
|
R |
|
X |
t |
|
t |
, Z |
t |
, F |
t |
|
t |
|
|
~ |
;U |
t |
|
t1 |
|
|
|
t2 |
|
|
t2 |
~ |
|
; |
B |
, (1) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
g |
U |
|
|
|
, |
|
|
, ~ ~ |
|
R |
|
1 |
, 2 |
|
2 , 3 |
|
|
, |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
, |
|
g |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
где J –показатели, характеризующие качество и эффективность функционирования основных элементов и подсистем СлО;
Ut — управляющие воздействия, позволяющие синтезировать как структуру СлО, так и процессы ее функционирования на различных этапах жизненного цикла;
q Q = {1,…,l} – множество номеров показателей;
g |
– множество динамических альтернатив (множество структур и параметров СлО, |
множество программ их функционирования); |
|
~ |
– заданные величины; |
Rg |
|
B – множество номеров пространственно-временных, технических и технологических |
|
ограничений, определяющих процессы реализации программ развития и управления |
|
функционированием СлО; |
|
T = (t0, tf] – интервал времени, на котором проводится расчет, многокритериальное |
|
оценивание, анализ показателей качества функционирования и развития СлО, а также |
|
осуществляется поиск соответствующих программ и законов управления. |
|
СПИИ РАН |
63 |

Оцениваемые в ходе проактивного управления показатели качества и эффективности функционирования СлО
•показатели результативности деятельности СлО
•временные показатели функционирования СлО
•показатели экономической эффективности и ресурсосберегаемости СлО
•показатели, характеризующие надежность, отказоустойчивость, живучесть, катастрофоустойчивость СлО
•показатели эффективности проактивного управления жизненным циклом СлО
СПИИ РАН |
64 |

Логико-управляемые (Logic controlled dynamic systems) системы - ядро логико- динамических
моделей, в котором логические методы используются наиболее полно и концентрировано 65
СПИИ РАН
(А.А.Фельдбаум, 1961: введение автоматического доказательства теорем в контур управления).
Формализация задач управления структурной динамикой СТС
|
|
|
Зимин И.Н., Иванилов Ю.П., Лернер А.Я. (1971) |
|
|
||||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
dxi( o) |
x( o) u(o) (a(o ) x(o ) ) |
|
(x(o ) a(o ) ) |
|
|
(x(o) a( o) ) |
||||||||||||
|
|
|
|
|
i |
i |
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
i 2 |
|
|
|||||
|
|
|
x(o) (t |
) 0; x(o) (t |
) a(o) ; 0 u(o ) b(o) ;J n |
(a(o ) x(o ) (t |
|
|
|
t f |
|
|
|
||||||||
|
|
|
))2 (u( ))d ; |
|
|
||||||||||||||||
|
|
|
i |
0 |
i |
f |
|
i |
i |
|
i |
|
i |
i f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
t0 |
|
|
|
|
|
|
Моисеев Н.Н. (1975) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
xi(o) ui(o) ; сi |
xi(o ) |
(a(o) x(o) ) (a(o) x(o) ) |
0 |
|
|
||||||||||||
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
i 2 |
|
|
|
t f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
xi(o ) (t0 ) 0; xi(o ) (tf ) ai(o ); 0 ui(o) |
bi(o ) ;J p |
J |
|
ici ( )d ; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t0 |
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СПИИ РАН |
66 |
Формализация задач управления структурной динамикой СТС
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
Предлагаемый подход |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
Предлагаемый подход |
|
|
|
|
|
||||||||||
|
|
|
xi |
ui |
; xi |
ui |
; ui |
(a |
x |
|
) |
(a |
x ) 0 |
|||||||||
|
|
|
(o ) |
|
(o) |
( n) |
( n) |
(o ) |
|
|
(o ) |
|
(o ) |
|
|
|
(o ) |
|
|
(o ) |
||
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
i 2 |
|
|
|
|
|
|
|
|
|
u(o ) (t |
) {0,1}; 0 u( n) |
b(o )u(o ) ; x(o ) (t |
) 0; x(o ) (t |
f |
) a(o) ; |
||||||||||||||
|
|
|
i |
0 |
|
|
|
i |
i |
i |
|
|
i |
t f |
|
0 |
|
|
i |
|
i |
|
|
|
|
|
|
|
J n (a(o ) |
x(o ) |
(t |
|
))2 |
(u( ))d . |
|
|
|
||||||||
|
|
|
|
|
|
f |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
||
; |
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
t0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СПИИ РАН |
67 |

Формализация задач управления структурной динамикой СТС
|
|
|
|
|
|
(o) |
|
|
|
(o) |
|
|
m |
|
|
|
|
|
(o) |
(o) |
(t0 ) 0, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
M o u |
|
|
(t) | xi |
|
ij (t) ui j |
; xi |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j 1 |
si |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
xi(o) (t f ) |
ai(o) , |
m |
|
|
|
c(jo,1) , |
|
|
|
||||||||||||
|
|
|
|
|
|
ui(o)j |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
m |
|
s j |
|
|
|
|
|
i 1 1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
ui(o)j ci(o,2) , ui(o)j (t) {0,1}, |
|
|
|
||||||||||||||||||
|
|
|
|
(o) |
j 1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
u |
|
(a |
(o) |
|
(o) |
) |
|
|
|
(a |
(o) |
(o) |
) |
0, |
||||||||||
|
|
|
i j |
|
~ |
~ |
x |
~ |
~ |
|
|
~ |
x ~ |
|
|||||||||||||
|
|
|
|
|
|
i |
|
i |
|
|
|
|
|
i |
i |
|
|
||||||||||
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
i 2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
i, j 1,..., m;i j; 1,..., si , |
|
|
|
|
|||||||||||||||||
; |
|
|
|
|
1 |
m si |
|
|
|
|
|
|
|
|
|
)]2 m |
t f |
|
|
|
|
|
|
|
|||
|
|
|
J (o) |
|
|
{[a(o) |
x(o) |
(t |
|
|
( )u(o) ( )d }, i j |
||||||||||||||||
|
|
|
|
f |
|
||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
i |
|
i |
|
|
|
|
i |
i j |
|
|
|
|||||||
|
|
|
|
|
2 i 1 1 |
|
|
|
|
|
|
|
|
|
|
j 1 t0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СПИИ РАН |
68 |

Формализация задач управления структурной динамикой СТС
|
|
M |
e |
|
u(e) (t) | x |
( g ) F (t)x( g ) ; |
|
|||||||
|
|
|
|
|
|
|
|
|
i |
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(ji ) (t) dтj (t)xi( g ) (j e) ; |
d j dтj |
|
||||||||
|
|
|
|
|
|
т |
|
|
|
m |
(e) |
; |
||
Z |
i |
Z F |
F |
|
Z |
i |
|
~ |
u ~ |
|
|
|||
|
|
2 |
||||||||||||
|
|
|
i i |
i |
|
|
|
i j |
|
|
||||
|
|
|
|
|
~ |
|
|
|
|
j 1 i |
|
j |
|
|
|
i j; i, j |
|
|
|
|
(e) |
(e) (o) |
|
||||||
|
M ; 0 |
ui ~ j c j ~ ui j , |
|
|||||||||||
J |
(e) |
b |
T |
K |
(t |
|
)b |
J |
(e) |
m m |
|
t f |
(e) |
( )d , j i |
|
|
|
||||||||||||
|
|
|
3 |
|
u ~ |
|||||||||
; |
2 |
|
i |
|
f |
|
|
i 1 j 1~ |
(i) |
i j |
|
|||
|
|
|
|
|
|
|
|
|
D |
|
t0 |
|
|
|
СПИИ РАН |
69 |
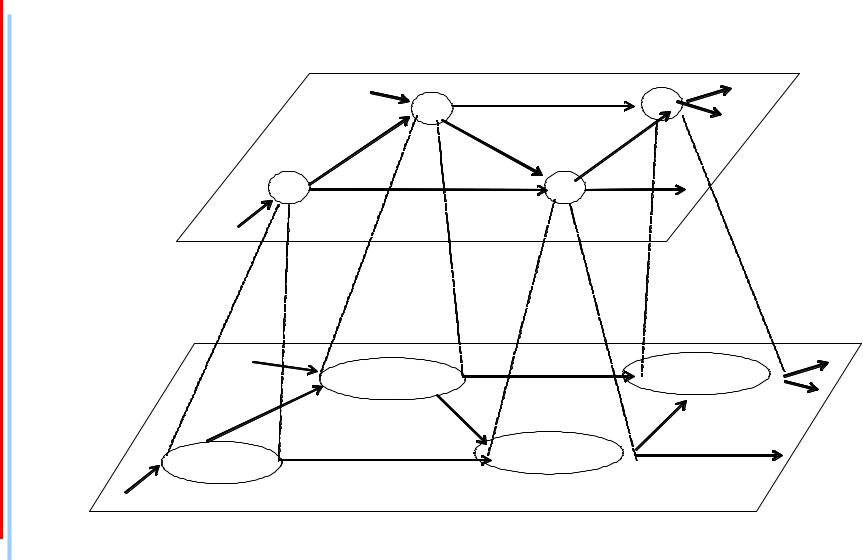
Обобщенное описание моделей и полимодельных комплексов
Класс статических моделей комплексов операций
|
xi+1 |
xi+1rxi+i |
xi+3 |
|
|
|
xi+2rxi+3 |
||
|
|
xi+1rxi+2 |
|
|
|
|
|
|
|
xi |
rxi |
|
xi+2 |
|
|
|
|
||
G: D
|
i 1 |
i 1 (u |
+1, |
3 |
i 3 |
|
|
||||
|
|
i+1,i+2 |
|
|
i+2,i+3 |
|
i,i+2 |
|
|
||
i |
i |
|
|
||
i |
|
|
|
|
|
Класс динамических моделей выполнения комплексов операций)
СПИИ РАН |
70 |
Обобщенное описание моделей и полимодельных комплексов
|
|
|
|
|
m |
n |
|
m |
|
|
|
|
|
|
u | xi uij ; uij (t) 1; |
uij 1;uij (t) {0,1}; |
|
|
|
||||||||||
|
|
|
|
|
j 1 |
i 1 |
|
j 1 |
|
|
|
|
|
|
|
|
t (t0 ,t f ] T ; |
xi (t0 ) 0; xi (t f ) ai ; |
|
|
|
||||||||
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
uij |
(a x (t)) (a x (t)) 0;i 1,...,n; j 1,...,m |
|
|
|||||||||||
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1i |
|
i2 |
|
|
|
|
|
||
|
|
|
|
|
|
Lux Lux |
(Lx )q , q n 1 |
|
|
|
||||
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
1, если есть единичный путь из вершины x в вершину x |
; |
|||||||||
l x |
|
|
|
|
|
|
|
|
|
|
i |
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
i j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0, в противоположном случае. |
|
|
|
|
|
|||||
|
|
|
|
|
1, если есть единичный путь из вершины u |
i |
в вершину x |
; |
|
|||||
l u |
|
|
|
|
|
|
|
|
|
j |
|
|
||
j |
|
|
|
|
|
|
|
|
|
|
|
|
||
i |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
0, в противоположном случае. |
|
|
|
|
|
|||||
СПИИ РАН |
71 |