

4627
.pdfМинистерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный лесотехнический университет им. Г.Ф. Морозова»
Факультет механический Кафедра автоматизации производственных процессов
УПРАВЛЕНИЕ МЕХАТРОННЫМИ И РОБОТОТЕХНИЧЕСКИМИ СИСТЕМАМИ
Методические указания к лабораторным работам для студентов
по направлению подготовки
15.03.06 Мехатроника и робототехника
Воронеж, 2019
УДК 658.5.011.56
Поляков С.И. Управление мехатронными и робототехническими системами
[Электронный ресурс]: методические указания к лабораторным работам для студентов по направлению подготовки 15.03.06 Мехатроника и робототехника / С. И. Поляков; ВГЛТУ. - Воронеж, 2019. - 62 с. - ЭБС ВГЛТУ.
Печатается по решению учебно-методического совета ФГБОУ ВО
«ВГЛТУ»
Рецензент: профессор кафедры систем управления и информационных технологий в строительстве Воронежского государственного технического университета В.И. Акимов
2
СОДЕРЖАНИЕ
ВВЕДЕНИЕ ……………………………………..................... |
4 |
Лабораторная работа №1. Исследование кинематической |
|
структуры пространственных механизмов …………….. |
4 |
Лабораторная работа №2. Исследование кинематических |
|
характеристик мехатронных модулей движения …….... |
7 |
Лабораторная работа №3. Исследование мехатронного |
|
модуля с вращательной кинематической парой и элек- |
|
трогидравлическим приводом поступательного действия |
|
…………………………………………………………. |
8 |
Лабораторная работа №4. Исследование динамических |
|
свойства мехатронного модуля движения при движении |
|
по заданной диаграмме скоростей ………………….. |
18 |
Лабораторная работа №5. Исследование электрогидрав- |
|
лического мехатронного модуля движения …………….. |
22 |
Лабораторная работа №6. Изучение основных способов |
|
управления пневматическими приводами по скорости и |
|
положению …………………………………….................... |
24 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ………………….. |
38 |
3
ВВЕДЕНИЕ
Проведение лабораторных занятий имеет целью:
–закрепить теоретические знания путем практической проверки основных законов и положений в лабораторных условиях;
–привить практические навыки в проведении простейшего эксперимента и анализа его результатов, в составлении отчетов по эксперименту;
–практически познакомить студентов с элементами и технологиями мехатроники и робототехники, дать навыки расчета параметров кинематических схем мехатронных систем, систем управления, элементов гидропневмоавтоматики. Все это позволяет усилить практическую направленность обучения, смысл которой состоит в том, что прививаются практические навыки по работе с достаточно сложными элементами мехатроники.
Лабораторная работа №1 ИССЛЕДОВАНИЕ КИНЕМАТИЧЕСКОЙ СТРУКТУРЫ
ПРОСТРАНСТВЕННЫХ МЕХАНИЗМОВ
Цель работы: выявление и определение технических показателей и основных кинематических характеристик предложенных конструкций механизмов.
Программа работы
1.Рассмотреть предложенные конструкции механизмов и выполнить их эскизные чертежи.
2.Представить предложенные механизмы в виде структурных и затем кинематических схем. Определить, плоским или пространственным является механизм и определить его число степеней свободы, а также обобщенные координаты. Указать, какие степени подвижности являются зависимыми от обобщенных координат.
3.Определить к какому типу механизмов относится предложенная конструкция: замкнутый или незамкнутый, простой или сложной.
4.Разбить механизм на кинематические пары. Определить степени подвижности и класс выделенных кинематических пар и характер их относительного движения. Определить класс всего механизма.
5.Определить вид исполнительного привода обобщенных координат, типы исполнительных двигателей и устройств передачи энергии от двигателя к звеньям.
4
6.Экспериментально определить кинематические параметры обобщенных координат и зависимых от них степеней подвижности.
Построить кинематические характеристики зависимых от обобщенных координат степеней подвижности.
7. Сделать выводы.
Указания к выполнению работы
Для успешного выполнения работы необходимо повторить лекционный материал по данному курсу, а именно: тему №1 – «Структура механизмов», в которой рассмотрены общие понятия механизмов, их классификационные признаки и структурные формулы.
При определении степеней подвижности для каждого из рассмотренных механизмов особо следует отметить, если получится, что число степей подвижности не соответствует числу обобщенных координат.
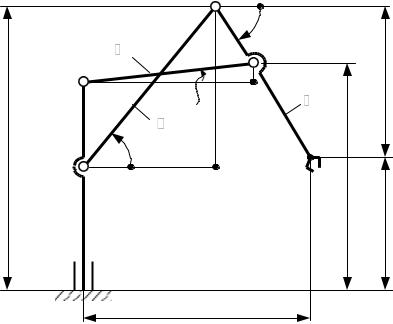
Для экспериментального определения кинематических перемен-
ных параметров механизма №1 2 1 , |
3 1 , |
4 1 , HE 1 , |
LE 1 |
|
1 следует рас- |
в зависимости от обобщенной координаты |
||
смотреть упрощенную кинематическую схему механизма (рис. 1.1).
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
4( 1) |
|
|
B |
3 |
|
|
|
D |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
( ) |
N |
4 |
|
C |
|
|
|
|
|||
h |
|
|
|
3 |
1 |
|
|
|
|
2 |
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
2( 1) |
M |
|
|
E |
|
|
|
|
|
|
|||
h D
O
h CE
H ( ) E 1
L( 1)
Рис. 1.1
Тогда параметры H E 1 и LE 1 определяются на основании непосредственных замеров, а параметры 2 1 , 3 1 , 4 1 могут быть определены расчетным путем по выражениям:
5

|
arcsin |
CM |
|
arcsin |
hC |
|
OA |
|
|||||
2 |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
l2 |
|
l2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
arcsin |
DN |
|
|
hD |
|
OB |
||||||
|
|
|
|
arcsin |
|
|
|
; |
|||||
3 |
|
|
|
|
|
|
|
|
|
|
|||
|
l3 |
|
l3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
arcsin |
|
hCE |
|
|
|
H |
E , |
|
|
|||
|
|
|
|
arcsin |
|
hC |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
l4 |
|
l4 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
где l2 , l3 , l4 ,OA,OB – постоянные величины; а hC , hD , HE – измеряемые параметры. Значения постоянных величин заносим в табл. 1.1, а переменных величин – в табл. 1.2.
|
|
|
|
Таблица 1.1 |
|
|
|
|
|
l2 , мм |
l3, мм |
l4, мм |
OA, мм |
OB, мм |
|
|
|
|
|
|
|
|
|
|
Таблица 1.2
Параметры |
|
|
Обобщенная координата 1, град |
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
0 |
30 |
|
60 |
90 |
120 |
|
|
180 |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Измеряемые |
|
hC, мм |
|
|
|
|
|
|
|
|
|
|
hD, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HE, мм |
|
|
|
|
|
|
|
|
|
|
|
L, мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
2, град |
|
|
|
|
|
|
|
|
|
Расчет |
ные |
|
|
|
|
|
|
|
|
|
|
3, град |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4, град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
1.Что называется механизмом? В чем его отличие от жесткой конструкции (фермы)?
2.С чем связано, что для ряда предложенных конструкций число степеней подвижности превышает число обобщенных координат? Какие дополнительные преимущества это дает механизму?
3.Какими реальными кинематическими парами представлены данные механизмы?
6
Лабораторная работа №2 ИССЛЕДОВАНИЕ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК
МЕХАТРОННЫХ МОДУЛЕЙ ДВИЖЕНИЯ
Цель работы: исследование кинематических характеристик мехатронных модулей движения, получение навыков оценки кинематической составляющей погрешности позиционирования.
Программа работы
1.Для предложенных кинематических структур выполнить описание прямой и обратной задач кинематики.
2.Подготовить программу на ЭВМ для реализации основных кинематических зависимостей (прямая и обратная задачи кинематики) указанных структур.
3.На основе решения прямой задачи кинематики для указанных структур получить и исследовать зависимость кинематических по-
грешностей S (схемы А и С), |
L |
(схема В). |
|
ц |
|
4. Сделать выводы. |
|
|
Указания к выполнению работы
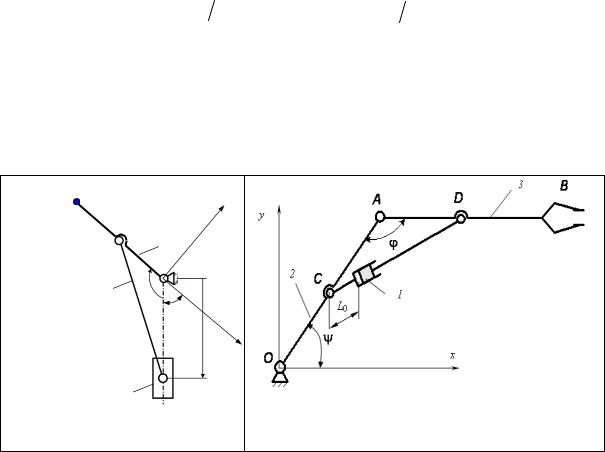
Кинематические схемы мехатронных модулей движения приведены в табл. 2.1.
Таблица 2.1
A
y
C
3
O
2
x
s
B
1
В
А
7
A
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
e |
||||
|
|
|
S |
|
|
|
|
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для структур А и C считать прямой зависимостью функцию S f , а для структуры В – функцию f Lц .
Для структур А и С исследование следует проводить для диапазона изменения угла от 0 до 180 с шагом 1 ; для структуры В – для диапазона изменения длины штока цилиндра Lц от L0 = 0,1 м до Lц = 0,8 м с шагом
0,005 м.
Контрольные вопросы
1.Что называется механизмом? В чем его отличие от жесткой конструкции (фермы)?
2.С чем связано, что для ряда предложенных конструкций число степеней подвижности превышает число обобщенных координат? Какие дополнительные преимущества это дает механизму?
3.Какими реальными кинематическими парами представлены данные механизмы?
Лабораторная работа №3 ИССЛЕДОВАНИЕ МЕХАТРОННОГО МОДУЛЯ С
ВРАЩАТЕЛЬНОЙ КИНЕМАТИЧЕСКОЙ ПАРОЙ И ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ
Цель работы: получение опыта анализа и выбора параметров мехатронного модуля вращательного действия с поступательным приводом.
Программа работы
1. Исследовать влияние конструктивных параметров гидроцилиндра (ГЦ) и параметра кинематической схемы kL на выбор расположения опоры В (точка В на рис. 3.1) и ход штока ГЦ
Lход f kL, .
8
2.Исследовать влияние параметров LA , kL и β на кинематическую погрешность мехатронного модуля.
3.Получить зависимость изменения угловой скорости стрелы ММ
стр от его геометрических и кинематических параметров.
4.Получить функцию управления ММ по скорости изменения углового положения стрелы.
5.Проанализировать зависимость Gшт f изменения нагрузки на шток ГЦ от угла φ поворота звена.
Указания к выполнению работы
При управлении мехатронным модулем (ММ) с вращательной кинематической парой часто используется привод поступательного действия, в частности, электрогидравлический с исполнительным гидроцилиндром. Целесообразность в таком приводе возникает при создании манипуляционных систем, работающих со значительными грузами (от 100 кг до нескольких тонн). Примерами являются манипуляторы и роботы для стройиндустрии, горной промышленности, стреловые механизмы строительно-дорожных машин и кранов. К таким системам предъявляются особые требования по обеспечению точности позиционирования (погрешность по углу поворота вращающегося звена до 2), высокое быстродействие при подъеме и опускании поворотного звена, стабильность его угловой скорости.
Для определения конструктивных параметров ММ и выбора структуры управления необходимо аргументировано подойти к вопросу о местах крепления управляющих гидроцилиндров, что сказывается, с одной стороны, на величину погрешности позиционирования, а с другой стороны, на саму возможность размещения гидроцилиндров, имеющих определенные геометрические и конструктивные размеры. В большинстве случаев при проведении исследований динамики таких систем считается, что нагрузка на шток гидроцилиндра является величиной постоянной, а скорость подъема или опускания звена манипулятора – неизменной. В действительности, ввиду изменения геометрических параметров звена, происходит перераспределение нагрузки на шток гидроцилиндра, что сказывается на изменении скорости его движения. Угловая скорость поворота звена ММ
9
при управлении только по положению звена зависит не только от изменения скорости движения штока при изменении нагрузки на последний, но и от самой геометрии крепления гидроцилиндра. Поэтому весьма актуальным является исследование процесса изменении нагрузки на шток при движении управляющего гидроцилиндра, а также ее влияние и влияние геометрических параметров на скорость перемещения звена ММ.
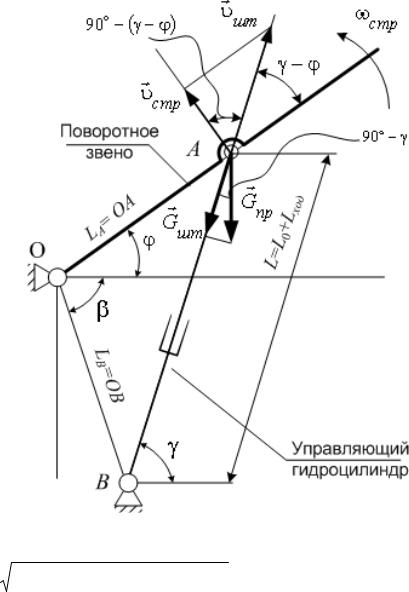
Рассмотрим расчетную схему ММ с гидравлическим приводом, приведенную на рис. 3.1.
Для данной схемы определим зависимость управляющего параметра L , являющегося функцией перемещения штока гидроцилиндра, от угла φ поворотного звена модуля. Применив теорему косинусов для треугольника ОАВ, получим
Рис. 3.1. Расчетная схема степени подвижности мехатронного модуля
L |
L2 |
L2 |
2L |
L cos . |
(3.1) |
|
A |
B |
|
A B |
|
10