

4627
.pdf
|
|
~ |
|
|
|
|
|
|
|
|
M min M дин M H . |
|
|
|
|
|
|
(4.3) |
|
||
Представив выражение (3.2) в виде |
|
|
|
|
||||||
|
|
k J J д H i p |
J H H M H |
~ |
|
|
||||
M min 2 |
opt |
|
|
|
2 M дин M H |
(4.4) |
|
|||
i p |
|
p |
|
|
||||||
|
|
opt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
|
|
и приравняв (4.3) и (4.4), получим, что M |
дин M H 2 |
Mдин M H |
, от- |
|||||||
M |
~ |
|
|
|
|
J H H M H |
|
|
||
куда дин |
M H или k J J д H i p |
|
|
|
|
|
|
|||
|
. |
(4.5) |
|
|||||||
|
|
|
|
opt |
|
i p |
p |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
opt |
|
|
|
|
Из полученного выражения следует, что расчетное ускорение можно получить, если нагрузкой уравновешивается половина момента двигателя, а другая половина идет на ускорение собственного ротора, т.е.
M |
|
2 |
J H H |
M |
H |
. |
(4.6) |
|||||||
min |
|
i p |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
p |
|
|
|
|
|
|||
|
|
|
|
|
|
|
opt |
|
|
|
|
|
|
|
Минимальная мощность ЭД: |
|
|||||||||||||
|
P |
2 J H H M H |
|
. |
(4.7) |
|||||||||
|
min |
|
|
|
p |
|
|
|
H |
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После получения значения M min |
по выражению (4.2) или (4.6) |
|||||||||||||
следует выполнить проверку на условие |
|
|||||||||||||
|
M min |
M |
|
M max |
, |
|
|
|
|
|||||
M ном |
|
|
|
|
||||||||||
|
M ном |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||
где M ном – номинальный момент ЭД.
Контрольные вопросы
1.Как влияет момент нагрузки и ускорение на нагрузке на оптимальное передаточное число редуктора?
2.Что происходит в динамике при несоответствии выбранного передаточного числа редуктора оптимальному по быстродействию? Покажите на переходных характеристиках.
21
Лабораторная работа №5 ИССЛЕДОВАНИЕ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО МЕХАТРОННОГО
МОДУЛЯ ДВИЖЕНИЯ
Цель работы: исследование динамики электрогидравлического следящего привода.
ПРОГРАММА РАБОТЫ
1.Изучить математическую модель электрогидравлического следящего привода с постоянными параметрами дросселирования.
2.Задав исходные данные для проектирования, рассчитать параметры электрогидравлического мехатронного модуля движения.
3.Ввести полученные исходные и расчетные данные в программу G_PRIVOD.PAS и с помощью ее произвести компьютерный синтез параметров аналогового регулятора и затем цифрового его аналога, подключив при этом модуль дискретного преобразования.
4.Получить переходной процесс с заданными показателями качества для аналоговой и цифровой систем и сделать выводы.
5.Задать новые исходные данные с повышенными требованиями к качеству переходного процесса (динамическая ошибка и точность позиционирования), произвести расчет параметров дросселирующего тормозного устройства и получить требуемый переходной процесс с помощью программы моделирования
G_PRIVOD_T.PAS.
УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ
Работа выполняется на основе выполненных расчетов в практическом занятии №5 «Расчет цифрового следящего электрогидравлического привода робототехнических и мехатронных систем». Поэтому теоретические и расчетные зависимости здесь не приводятся.
Исходными данными для синтеза электрогидравлической системы являются следующие параметры:
1.Погрешность позиционирования .
2.Время движения из одного исходного положения в другое (вре-
22

|
мя переходного процесса tп или требуемая скорость перемеще- |
|
ния рабочего органа или штока ГЦ при заданном начальном |
|
положении рабочего органа или ГЦ. |
3. |
Длина гидролинии lтр , марка рабочей жидкости или кинемати- |
|
ческая вязкость и плотность рабочей жидкости и ж, внутрен- |
|
ний диаметр гидролинии dтр . |
4. |
Диаметр поршня ГЦ d ГЦ , внешнее усилие на поршень FГЦ и |
|
давление в гидросистеме p0 . |
5. |
Тип ЭГР или время его срабатывания tср и номинальное тяговое |
усилие электромагнита Fном (из технической характеристики). Все эти данные необходимо занести в таблицу 5.1. На основе
этих данных определяется целый ряд дополнительных параметров, таких как модули упругости жидкости и материалов трубопровода и ГЦ, коэффициент окна ЭГР, силы трения в ГЦ и т.п. При запуске программы происходит запрос на эти данные. Результатами проектирования являются параметры настройки регулятора (если это П-
регулятор), время переходного процесса tп* , погрешность позициони-
рования *, динамическая ошибка (перерегулирование) ,%. Все эти данные также заносятся в таблицу 4.1. Для варианта с тормозными устройствами приводятся данные по настройке тормозных дросселей
– коэффициент сопротивления kт и расстояние, на котором происходит срабатывание тормозных клапанов .
В отчет по лабораторной работе прикладываются распечатки полученных переходных процессов.
Таблица 5.1
|
|
|
|
|
Исходные данные |
|
|
|
|
|
|
|
|
|
|
Результаты |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
исследования |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
t |
п |
, |
хнач, |
хкон, |
l |
, |
d |
тр |
, |
, |
p |
0 |
, |
t |
ср |
, |
F |
, |
d |
ГЦ |
, |
|
t * , |
|
* |
, |
|
|
, |
|
|
|
тр |
|
|
ж |
|
|
|
|
ном |
|
|
k рег |
п |
|
|
|
|
|||||||||||
% |
|
|
|
м |
м |
|
|
|
|
|
кг/м3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
% |
|
|
|
с |
|
|
м |
|
м |
|
МПа |
|
м |
|
|
Н |
|
м |
|
|
с |
% |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы
1.Какие основные параметры электрогидравлического мехатронного модуля движения необходимо знать при его проектировании?
23
2.Перечислите методы, с помощью которых можно добиться требуемых показателей качества переходного процесса.
3.Какие параметры цифровой части системы влияют на точность воспроизведения аналогового закона регулирования?
Лабораторная работа №6 ИЗУЧЕНИЕ ОСНОВНЫХ СПОСОБОВ УПРАВЛЕНИЯ
ПНЕВМАТИЧЕСКИМИ ПРИВОДАМИ ПО СКОРОСТИ И ПОЛОЖЕНИЮ
Пневматические и электропневматические символы
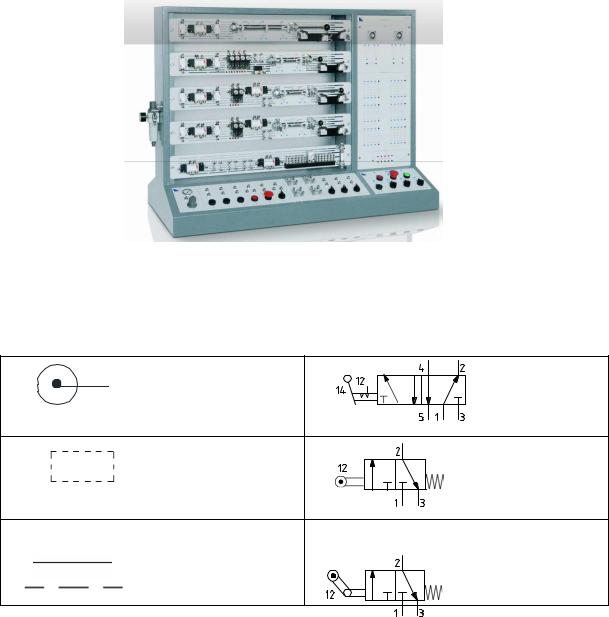
Мехатронный электропневматический стенд Camozzi имеет вид, показанный на рис. 6.1.
Рис. 6.1. Общий вид электропневматического стенда фирмы Camozzi
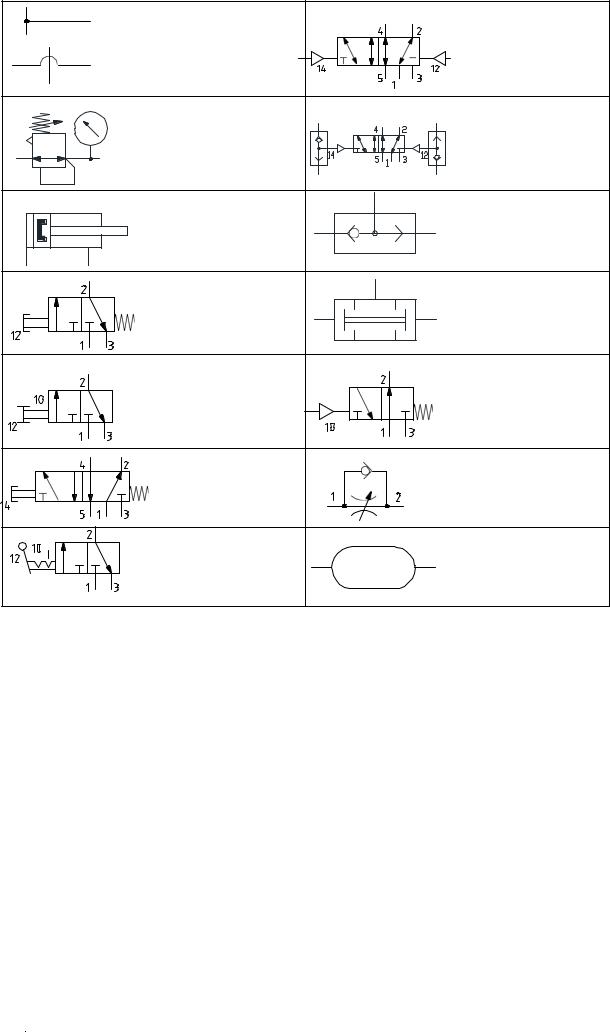
В стенде использованы различные пневматические и электропневматические элементы и устройства, условные обозначения которых представлены в табл. 6.1.
|
Таблица 6.1 |
Источник пневматического |
Распределитель 5/2 |
питания |
бистабильный, |
|
управление типа |
|
тумблер PS-5/2 |
Группа FR + |
Распределитель 3/2 |
распределитель 3/2 |
нормально-закрытый |
|
(н.з.) моностабильный |
|
управление типа ролик |
|
MSW-3/2 |
Силовая линия Линия |
Распределитель 3/2 н.з. |
|
моностабильный |
управления |
управление типа ролик с |
|
ломающимся рычагом |
MSW-3/2U
24
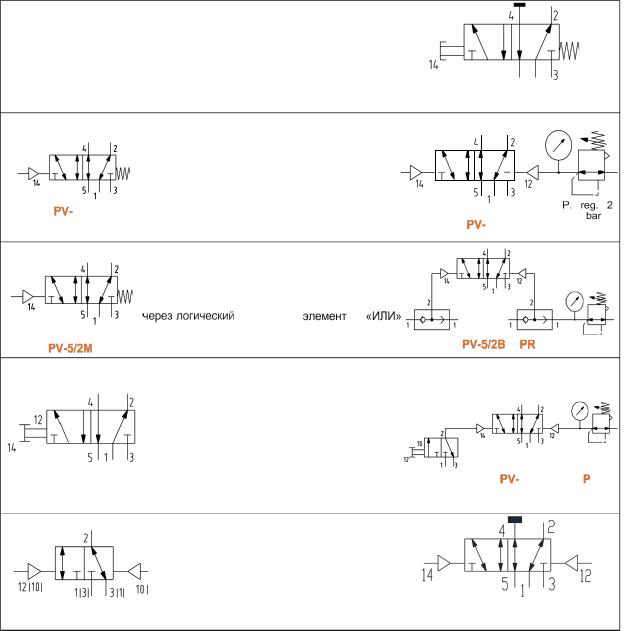
Распределитель 5/2 Объединение линий бистабильный с
пневматическим
|
|
|
управлением PV-5/2B |
|||
Пересечение линий |
|
|
|
|
||
|
|
|
Распределитель |
5/2 |
||
Регулятор давления со |
бистабильный |
с |
||||
сбросом избыточ- |
ного |
пневматическим |
|
|||
давления PR |
|
управлением и логи- |
||||
|
|
|
ческими элементами |
|||
|
|
|
ИЛИ PV-5/2BS |
|
||
Магнитный |
цилиндр |
Логический |
элемент |
|||
двустороннего |
дей- |
“ИЛИ” |
|
|
|
|
ствия |
CL/DA-100 |
|
|
|
|
|
CL/DA-200 |
|
|
|
|
|
|
Распределитель |
3/2 |
Логический |
элемент |
|||
н.з., моностабильный, |
“И” |
|
|
|
||
управление |
|
типа |
|
|
|
|
кнопка PB-3/2 |
|
|
|
|
|
|
Распределитель |
3/2 |
Распределитель |
3/2 |
|||
бистабильный, |
|
нормально |
открытый |
|||
управление |
|
типа |
(н.о.) |
моностабиль- |
||
кнопка с фиксацией |
ный |
с пневматиче- |
||||
PBE-3/2 |
|
|
ским |
управлением |
и |
|
|
|
|
пружинным возвра- |
|
||
Распределитель |
5/2 |
Регулируемый дрос- |
|
|||
моностабильный, |
|
сель с обратным |
|
|||
управление |
|
типа |
клапаном RFU |
|
||
кнопка PB-5/2 |
|
|
|
|
|
|
Распределитель |
3/2 |
Ресивер CPT |
|
|
||
бистабильный, |
|
|
|
|
|
|
управление |
|
типа |
|
|
|
|
тумблер PS-3/2 |
|
|
|
|
|
|
25
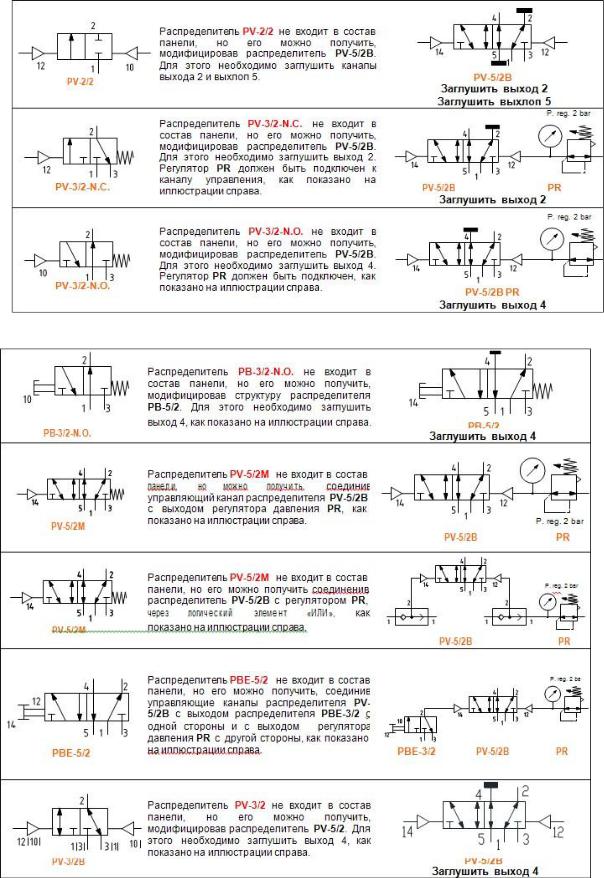
Распределитель PB-3/2-N.O. не входит в состав панели, но его можно получить, модифицировав структуру распределителя PB- 5/2. Для этого необходимо заглушить выход 4, как показано на иллюстрации справа
Распределитель PV-5/2M не входит в состав
управляющий канал распределителя
PV-5/2B
с выходом регулятора давления PR,
Распределитель PV-5/2M не входит в состав панели, но его можно получить, соединив распределитель PV-5/2B с регулятором PR,
как показано на иллюстрации справа.
|
Распределитель PBE-5/2 не входит в |
P. reg. 2 |
|
|
состав |
|
|
|
панели, но его можно получить, соеди- |
|
|
|
нив управляющие каналы распредели- |
|
|
|
одной стороны и с выходом |
регу- |
|
|
давления PR с другой стороны, как |
|
|
PBE- |
показано |
|
PBE- |
|
|
|
|
Распределитель PV-3/2 не входит в состав панели, но его можно получить, модифицировав распределитель PV-5/2. Для этого необходимо заглушить выход 4, как показано на иллюстрации справа.
26
27
Прямое управление пневматическим цилиндром одностороннего действия с помощью моностабильного распределителя,
обеспечивающего его перемещение из точки А+ в точку А-
Задание
1.Разработать принципиальные пневматические схемы.
2.Начертить диаграмму состояний входных сигналов в соответствии с диаграммой «перемещение-шаг».
Указания к выполнению
Управление называется ПРЯМЫМ, когда приведение в движение пневматического цилиндра осуществляется с помощью одного распределителя воздействием мускульной силы оператора или механического органа без усиления сигнала в канале управления.
Распределитель называется МОНОСТАБИЛЬНЫМ, когда при отсутствии сигнала в канале управления распределителя механическая или пневматическая возвратная пружина активирует начальное нормальное состояние.
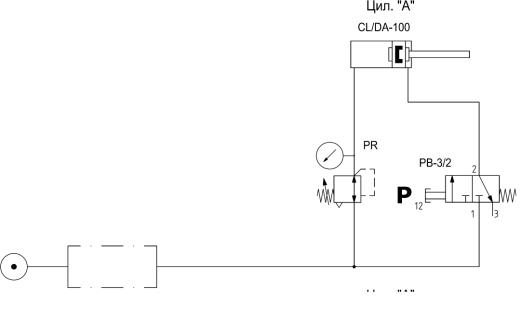
В первой схеме: начальное положение цилиндра A+ (выдвинутое состояние) достигается регулятором давления, установленным на значение, меньшее по сравнению со значением рабочего давления. Втягивание цилиндра происходит при срабатывании распределителя 3/2 Н.З (PB-3/2-NC).
Во второй схеме: начальное положение цилиндра A+ (выдвинутое состояние) достигается распределителем 3/2 Н.О. (PB- 3/2-NO) при отсутствии управляющего сигнала. Когда оператор подает управляющий сигнал, воздействуя на кнопку распределителя, из бесштоковой полости цилиндра воздух сбрасывается в атмосферу, а давление в штоковой полости создаёт необходимый перепад для втягивания поршня цилиндра.
Можно выполнить два одновременных перемещения, имея на стенде два цилиндра. В этом случае необходимо использовать один 5/2 моностабильный распределитель PB-5/2, выходы которого будут имитировать выходы 3/2 Н.З. и Н.О. распределителей. Для модификации цилиндра двустороннего действия в цилиндр одностороннего действия необходимо подать воздух в камеру соответствующей полости с помощью регулятора давления,
настроенного на меньшее давление по сравнению с рабочим давлением (3-4 бара). При перемещении штока цилиндра избыточное давление из полости опустошения будет сброшено через отверстие сброса в регуляторе давления.
Независимо от используемой схемы в случае, когда цилиндр неподвижен и находится в положении A+, воздействие оператора на распределитель соответствует логическому "0".
Перечень используемых компонентов: Цилиндр CL/DA-100 – 2 шт. Регулятор давления PR – 2 шт.
Распределитель с кнопкой 3/2 Н.З. PB-3/2-N.C. – 1 шт. Распределитель с кнопкой 3/2 Н.O. PB-3/2-N.O. – 1 шт.
Пример реализуемых схем:
Схема 1
29
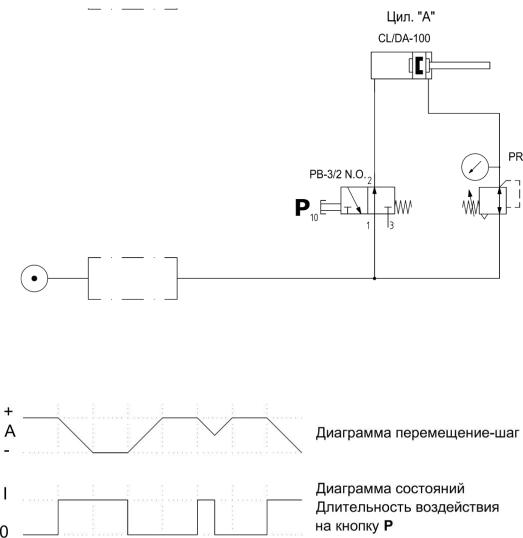
Схема 2
Пример полученных диаграмм:
30