

4627
.pdfВыразим величину LB через расстояние |
LA между двумя креп- |
лениями поворотного звена. Получим: |
|
LB kLLA , |
(3.2) |
где kL – конструктивный параметр кинематической схемы, опреде-
ляющий соотношение сторон LA и LB |
и который может принимать |
значения как больше 1, так и меньше 1. |
|
С учетом (3.2) выражение (3.1) примет вид |
|
L LA 1 kL2 2k L cos . |
(3.3) |
Исследования по п.1. При выборе угла β, определяющего неподвижную точку В крепления гидроцилиндра, необходимо учитывать, что расстояние AB L L0 Lход, где L0 – неизменяемая часть, включающая в себя неизменяемую длину гидроцилиндра («мертвый» объ-
ем и часть штока), конструкцию крепления; |
Lход – ход поршня гидро- |
||||||||
цилиндра, определяемый как |
|
|
|
||||||
|
Lход Lm ax Lm in , |
|
|
(3.3) |
|||||
где величины Lmax и Lmin |
соответствуют максимальному max |
и ми- |
|||||||
нимальном |
min углам поворота стрелы ММ: |
|
|||||||
у |
|
|
|
|
|
|
|
|
|
L |
L |
A |
1 k 2 2k |
L |
cos |
, |
|
|
|
min |
|
L |
|
min |
|
|
|
||
Lmax LA |
1 k2L 2kL cos max . |
(3.4) |
|||||||
|
Как правило, для большинства конструкций ГЦ величина |
Lход |
|||||||
составляет от 40 % до 75 % от |
Lmin . В этом случае величина β должна |
||||||||
выбираться таким образом, чтобы выполнялось неравенство |
|
||||||||
|
|
|
|
|
|
Lход kходLmin , |
(3.5) |
||
где kход=0,4 ÷ 0,75 – конструктивный коэффициент хода ГЦ, характеризующий соотношением Lход / Lmin .
Необходимо:
1.Получить графическое решение неравенства (3.5) при
заданном |
kL для диапазона углов от |
min до max |
|
значении |
|
|
|
(коэффициент kL и углы min и max |
задаются для каждого |
||
студента индивидуально) для значений |
LA = 0,25; 0,5; 0,75 ,м. |
||
11
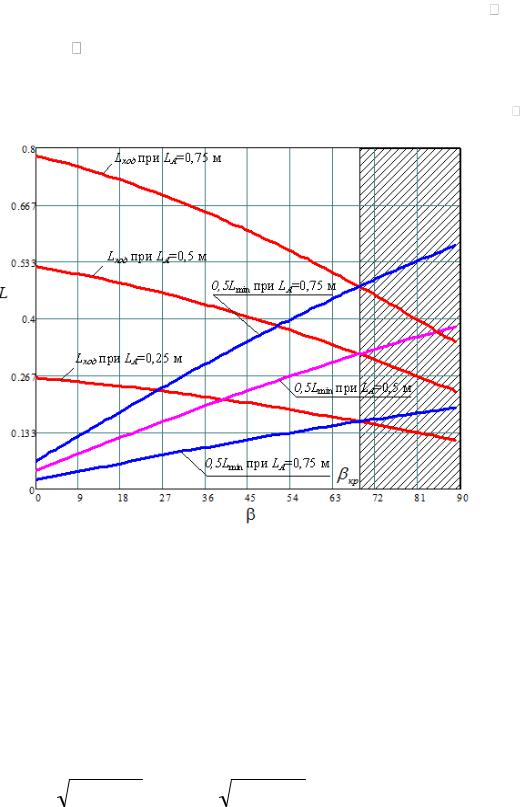
На рис. 3.2 приведен пример графическое решение неравенства
(3.5), из |
которого |
видно, что для принятых значений |
|
LA = 0,25; 0,5; 0,75 ,м |
диапазона углов от min 10 |
до |
|
max 75 |
и коэффициенте kL =1 область возможных значе- |
||
ний углов β, характеризующих точку крепления неподвижной части ГЦ, область решений находится за пределами кр 68,6 .
Рис. 3.2. Пример графического решения неравенства (3.5)
Графическое решение неравенства (3.5) позволяет на основании выбора конструктивного угла β определять необходимый ход поршня
ГЦ Lход.
Для систем автоматизированного проектирования больший интерес представляет аналитическое определение критического угла
рое для данного модуля движения определяется как
кр |
arccos |
|
Y |
|
|
arcsin |
|
|
B |
|
, |
(3.6) |
|
|
A2 B2 |
|
A2 B2 |
||||||||||
|
|
1 k 2 Z2 |
1 |
|
|
|
|
|
|
|
|||
где Y |
L |
ход |
|
; |
A Z 2 |
cos |
|
cos |
; |
||||
|
|
|
|
min |
|||||||||
|
|
|
|
2k L |
|
|
ход |
|
|
max |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B Z 2 ход
12

2.Провести качественные исследования зависимости критического угла ММ βкр от конструктивных параметров схемы kxoд, kL, φmin, φmax. Результаты исследований занести в табл. 3.1.
3.Сделать выводы.
|
|
Таблица 3.1 |
|
|
|
|
|
Параметр |
|
Критический |
|
|
|
||
|
Значение, |
||
Наименование |
угол βкр |
||
действие |
|||
|
|
||
|
|
|
|
Коэффициент хода ГЦ kход |
Увеличивается |
|
|
|
|
|
|
Минимальный угол стрелы |
Увеличивается |
|
|
ММ φmin |
|
||
|
|
||
|
|
|
|
Диапазон изменения углов |
Увеличивается |
|
|
φmax - φmin |
|
||
|
|
||
|
|
|
|
|
Увеличивается в |
|
|
|
диапазоне |
|
|
Коэффициент соотношения |
kLmin ≤ kL ≤ 1 |
|
|
сторон ММ kL |
|
|
|
Увеличивается в |
|
||
|
диапазоне |
|
|
|
1 ≤ kL ≤ kLmax |
|
|
|
|
|
Данные исследования позволяют проводить осознанный выбор параметров кинематической схемы ММ и конструкций ГЦ.
Исследования по п.2. Для оценки кинематической погрешности
ММ по углу φ решим прямую задачу кинематики, т.е. определим функцию f L из уравнения (3.3):
|
arccos |
L2A 1 kL2 |
L2 |
|
|
||
|
|
|
|
|
(3.7) |
||
|
2L2 k |
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
A L |
|
|
||
и разложим ее в ряд Тейлора по переменной L . В результате получим: |
|||||||
|
L |
2L |
L ,(3.8) |
1 k2 |
|||
|
L |
4L4 k2 L4 1 k2 L4 2L2 L2 |
|||||
|
|
|
A L A |
L |
A |
L |
|
где L можно расценивать как погрешность электрогидравлической системы управления по перемещению ГЦ.
С целью выбора наилучших параметров кинематической схемы,
13
обеспечивающих минимизацию интегральной составляющей кинема-
тической погрешности, определяемой выражением (3.8), проведем |
||||||||
анализ выражения2L |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
L |
4L4 k2 L4 |
1 k2 |
, L4 2L2 L2 1 k2 |
(3.9) |
||||
|
||||||||
|
|
A L |
A |
L |
A |
L |
||
являющегося в общем случае функцией параметров φ, β, kL, LA.
Необходимо:
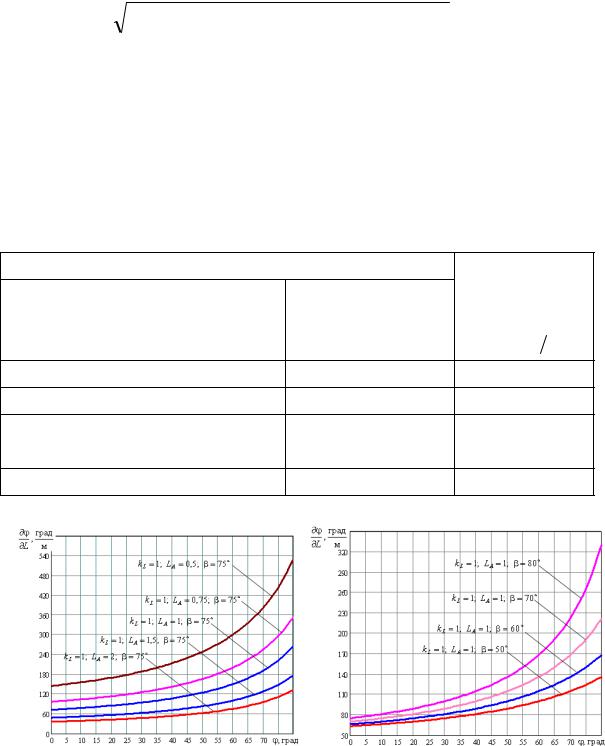
1.Получить графические результаты исследований выражения (3.9) (примеры таких зависимостей приведены на рис. 3.3.
2.Провести качественное обобщение результатов исследования, их результаты свести в табл. 3.2.
3.Сделать выводы.
|
|
Таблица 3.2 |
|
Параметр |
|
Составляю- |
|
|
Значение, |
щая погреш- |
|
Наименование |
ности |
||
действие |
|||
|
L |
||
|
|
||
Угол поворота стрелы φ |
Увеличивается |
|
|
Конструктивный параметр LA |
Увеличивается |
|
|
Коэффициент соотношения |
Увеличивается |
|
|
сторон ММ kL |
|
||
|
|
||
Конструктивный параметр β |
Увеличивается |
|
14
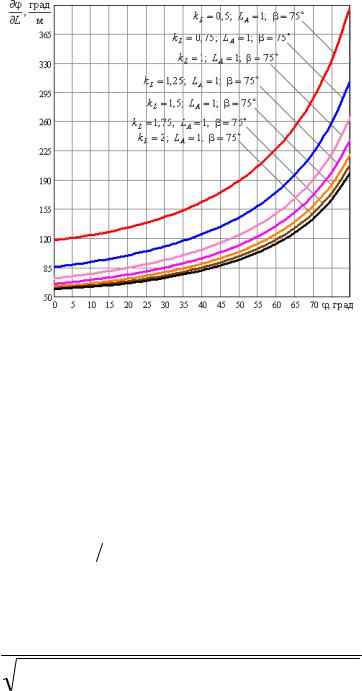
Рис. 3.3. Пример исследования влияния конструктивных параметров гидроцилиндра и геометрии ММ на его кинематическую погрешность
Исследования по п. 3. Для определения скорости изменения
угла поворота стрелы стр применим следующее преобразование: |
|||
стр d |
d |
dL d гц, |
(3.10) |
dt |
dL |
dt dL |
|
где гц – скорость перемещения штока ГЦ, а величина и характер из-
менения параметра |
|
d dL |
полностью |
определяются |
выражением |
||||||||
(3.9). Тогда выражения для расчета и анализа величины |
|
стр пред- |
|||||||||||
ставится в следующем виде |
|
|
|
|
|
|
|
|
|
||||
стр |
|
|
|
|
|
2L |
|
|
|
|
гц . (3.11) |
||
4 |
|
2 |
4 |
k |
2 |
4 |
2 |
2 |
2 |
||||
4L |
k |
|
|
||||||||||
|
|
L 1 |
L |
L 2L L 1 k |
L |
|
|
||||||
|
A L |
A |
|
|
A |
|
|
|
|
||||
Необходимо:
1. Построить график зависимости (3.11) при заданном значении
kL для диапазона углов от min до max |
(коэффициент kL , углы |
|
min , max , кр , величины LA |
и гц задаются для каждого студента |
|
индивидуально). |
|
|
2. Для заданного диапазона углов от |
min до max определить |
|
соотношение max / min . |
|
|
3. Сделать выводы. |
|
|
|
15 |
|
Исследование по п. 4. Анализ параметра d  dL показывает (рис. 3.3), что при изменении угла поворота вращательной кинематической пары ММ от min = 0 ÷ 10° до max = 70° ÷ 80° при постоянной скорости гц перемещения штока ГЦ угловая скорость поворота стрелы стр может увеличиваться в 2 - 4,5 раза (исследования 3). Для уменьшения динамических нагрузок при управлении стреловым механизмом ММ следует стабилизировать угловую скорость стр путем
dL показывает (рис. 3.3), что при изменении угла поворота вращательной кинематической пары ММ от min = 0 ÷ 10° до max = 70° ÷ 80° при постоянной скорости гц перемещения штока ГЦ угловая скорость поворота стрелы стр может увеличиваться в 2 - 4,5 раза (исследования 3). Для уменьшения динамических нагрузок при управлении стреловым механизмом ММ следует стабилизировать угловую скорость стр путем
регулирования скорости гц . Выражение, которое можно использовать |
||||||||
в системе управления для расчета скорости |
гц f , стр , получим |
|||||||
по аналогии с выражением (3.10): |
|
|||||||
гц |
dL |
|
dL |
|
d |
|
dL стр , |
(3.12) |
dt |
d |
dt |
d |
|
||||
|
|
|
|
|
||||
где величина dL d определится путем дифференцирования выражения (3.3) по углу поворота φ:
d определится путем дифференцирования выражения (3.3) по углу поворота φ:
dL |
|
|
LAkL sin |
|
|
d |
|
. |
|||
|
|
2 |
2kL cos |
||
|
|
|
|||
|
|
|
1 kL |
|
|
Тогда выражение (3.12) примет следующий вид:
гц |
LAkL sin |
стр . |
(3.13) |
|||
1 k 2 |
2k |
L |
cos |
|||
|
L |
|
|
|
|
|
Задавая заданное значение угловой скорости стрелы ММ стр и
контролируя положение стрелы φ, выражение (3.13) представляет функцию управления ММ по скорости углового перемещения стрелы
гц f , стр .
Необходимо: |
|
1. Исследовать зависимость |
гц f , стр при заданном зна- |
чении kL для диапазона углов от |
min до max (коэффициент kL , уг- |
лы min , max , кр , величины LA |
и стр задаются для каждого сту- |
дента индивидуально). |
|
2. Сделать выводы. |
|
16
Исследование по п. 5. Величина нагрузки на шток гидроцилиндра Gшт в зависимости от угла поворота φ определится как
Gшт Gпр sin , |
(3.14) |
где Gпр – приведенная вертикальная нагрузка от всех сил, действую-
щих на управляющее звено ММ; γ – угол наклона ГЦ. Угол γ опреде- |
||||
лим по теореме косинусов из треугольника ОАВ (см. рис. 3.1) как |
||||
|
L2 |
L2 k 2 |
L2 |
|
arccos |
A |
L |
A |
. |
|
|
|
||
2LA L
Подставив в последнее выражение функцию L из (3.3), получим для угла γ:
arccos |
1 kL cos |
|
|
|
|
|
|||||||||
1 k2 |
|
|
|
|
|
cos . |
|
|
(3.15) |
||||||
|
|
2k |
L |
|
|
||||||||||
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
||
С учетом уравнения (3.15) выражение для расчета нагрузки на |
|||||||||||||||
шток (3.14) окончательно запишется следующим образом: |
|
||||||||||||||
|
|
|
|
|
|
|
|
1 kL cos |
|
|
|
||||
Gшт G |
sin arccos |
|
|
|
|
|
|
||||||||
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(3.16) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
k |
2 |
2k |
|
cos |
|
|
||||||
|
|
|
L |
L |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Необходимо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Построить график зависимости (3.16) при заданном значении |
|||||||||||||||
kL для диапазона углов от |
|
min |
|
до max (коэффициент |
kL , углы |
||||||||||
min , max , кр , величины LA |
|
и Gпр задаются для каждого студента |
|||||||||||||
индивидуально). Пример такой графической зависимости показан на рис. 3.4.
2.Сделать выводы:
как меняется величина нагрузки на шток при изменении угла от min до max ;
как меняется нагрузка на шток при изменении коэффициента соотношения сторон kL от 1,25 до 0,75;
как меняется нагрузка на шток при изменении угла β от
кр до 85°.
17

Рис. 3.4. Изменение нагрузки на шток гидроцилиндра в зависимости от угла наклона звена
Контрольные вопросы
1.Имеет ли функция βкр = f(kxoд, kL, φmin, φmax) экстремум и если имеет, то относительно какого параметра и при каком значении этого параметра достигает максимума или минимума.
2.С какой целью проводились исследования по п.3, п.4 и п.5?
Лабораторная работа №4 ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СВОЙСТВА
МЕХАТРОННОГО МОДУЛЯ ДВИЖЕНИЯ ПРИ ДВИЖЕНИИ ПО ЗАДАННОЙ ДИАГРАММЕ СКОРОСТЕЙ
Цель работы: получение опыта выбора параметров механического редуктора при проектировании следящей системы управления.
Программа работы
1.Для заданных исходных параметров объекта управления выбрать электродвигатель и рассчитать передаточное число механического
18
редуктора, обеспечивающего минимальный момент при пуске при
заданном ускорении (движение по заданной тактограмме). |
|
|
2. Провести исследования зависимости iopt f (Mн ) |
и iopt |
f ( н ) |
при значениях момента нагрузки |
|
|
Mн 0,5M нзад; 0,75M нзад; M нзад;1,25M задн ;1,5M задн
изначениях ускорения на нагрузке
|
н |
0,5 зад ; 0,75 зад ; зад ;1,25 зад ;1,5 зад |
||||
|
н |
н |
н |
н |
н |
|
3.В среде моделирования MatLab Simulink составить модель системы управления, включающую задатчик скорости вращения объекта управления, П-регулятор, преобразователь (звено первого порядка), электродвигатель, редуктор, объект управления.
4.Провести исследование на модели влияния передаточного числа редуктора на динамические свойства системы при
i iopt; i 0.75iopt; i 1,25iopt , где iopt – передаточное число редуктора, обеспечивающее минимальное время переходного процесса.
5. Сделать выводы.
Указания к выполнению работы
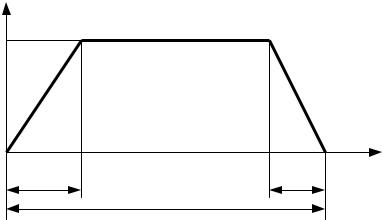
Схема объекта исследования приведена на рис. 3.1. Диаграмма движения объекта приведена на рис. 4.1.
H |
|
H ном |
|
|
t |
tn |
tт |
|
tдв |
Рис. 4.1. Диаграмма движения объекта |
|
В большинстве случаев при проектировании как мехатронных, так и робототехнических систем, проектировщику привода задается или принимается им из каких-либо технологических соображений диаграмма движения механизма. Примерный вид такой диаграммы приведен на рис. 4.1. Такая диаграмма строится на основе принятой
19
или рассчитанной по циклограмме работы всей системы и технологического оборудования номинальной скорости движения исполнительного механизма, требуемых времени разгона (пуска) tn и торможения tm исполнительного органа. При разработке такой диаграммы следует проверить, выполняется ли условие обеспечения заданного перемещения S за время движения tдв (если такое условие поставлено). Для этого необходимо проинтегрировать диаграмму движения
|
tдв |
S |
H dt или найти площадь фигуры (трапеции), ограниченной |
|
0 |
линиями диаграммы движения и осью времени t (рис.4.1).
Для решения поставленной задачи нахождения оптимального передаточного числа, обеспечивающего минимум момента ЭД при
заданном ускорении пуска n |
( n Hном |
tn ) или торможения m |
|||||||
( m H |
ном |
tm ), продифференцируем выражение (3.4) по i p и при- |
|||||||
|
|
|
|
|
|
|
|
||
равняем полученное выражение к нулю: |
|
||||||||
dM kJ Jд H JH H |
H |
M 0 . |
|
||||||
|
|
|
|
|
|
|
|
|
|
dip |
|
|
|
i2 |
p |
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
Из последнего выражения определим оптимальное передаточное |
|||||||||
число редуктора |
|
|
|
|
|||||
i p |
opt |
|
J H H M H , |
|
|
|
(4.1) |
||
|
|
k J J д H p |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
где H – ускорение пуска или торможения нагрузки.
Значение минимального момента ЭД получим, подставив полу-
ченное значение ip |
opt |
в выражение (3.4): |
|
|||
|
|
|
|
|
|
|
M min 2 |
k J J д H J H |
H M H |
. |
(4.2) |
||
|
|
p |
|
|||
|
|
|
|
|
|
|
В последнее выражение входит неизвестный момент инерции двигателя. Для решения данного уравнения учтем, что согласно (3.4) момент, развиваемый двигателем, уравновешивается суммой динами-
ческого момента ЭД |
M дин k J J д H i p |
и составляющей приведенно- |
||
|
opt |
|
M H i p |
p , т.е. |
го динамического момента нагрузки M~ |
J H H |
|||
|
H |
|
opt |
|
|
20 |
|
|
|