

4360
.pdf31
4.4.Контрольные вопросы к лабораторной работе
1.Что такое решѐтчатая функция? Что означает термин «дискрет решѐтчатой функции»?
2.Что представляет собой огибающая решѐтчатой функции? Сколько огибающих может быть у решѐтчатой функции?
3.Дать определения первой прямой и обратной разностей, второй прямой и обратной разностей.
4.Назвать аналоги первой прямой и обратной разностей, второй прямой
иобратной разностей, которые используются при описании динамических процессов в непрерывных системах.
5.В каких уравнениях, используемых при математическом описании дискретных систем, используется понятие прямых и обратных разностей?
6.Назвать аналог уравнений данного типа, который используются при математическом моделировании динамических процессов в непрерывных системах.
7.В чѐм состоит особенность решения разностных уравнений рекуррентным методом?
8.Что представляет собой z-преобразование? Для чего оно используется? Как соотносятся z-преобразование и преобразование Лапласа?
9.Привести общую математическую запись, описывающую z- преобразование полубесконечной последовательности.
10.Какими свойствами обладает функция g[kT], представленная в записи z-преобразования?
11. В чѐм заключается «идея» использования z-преобразования для решения разностных уравнений?

32
Лабораторная работа №5. Квантование и восстановление сигналов. Моделирование работы фиксаторов нулевого и первого порядков в среде Simulink (2 часа)
Цель работы: Изучение процессов квантования и восстановления сигналов, моделирование работы фиксаторов (экстраполяторов) нулевого и первого порядков в среде Simulink.
5.1 Основные понятия
Фиксатором (экстраполятором) нулевого порядка (англ. zero-order hold) называется преобразующий элемент, который при получении входного сигнала от цифровой части системы управления, удерживает (фиксирует) его в течение заданного интервала квантования T до появления следующего значения сигнала (рисунок 5.1).
Рисунок 5.1 – Работа фиксатора нулевого порядка
Фиксатор первого порядка (англ. first-order hold) выполняет линейную экстраполяцию на основе двух предыдущих значений дискретного сигнала (рисунок 5.2).
Рисунок 5.2 – Работа фиксатора первого порядка
Непрерывный сигнал на интервале kT t (k 1)T восстанавливается по закону линейной экстраполяции:
u(t) u[k] t kT (u[k] u[k 1]) . T
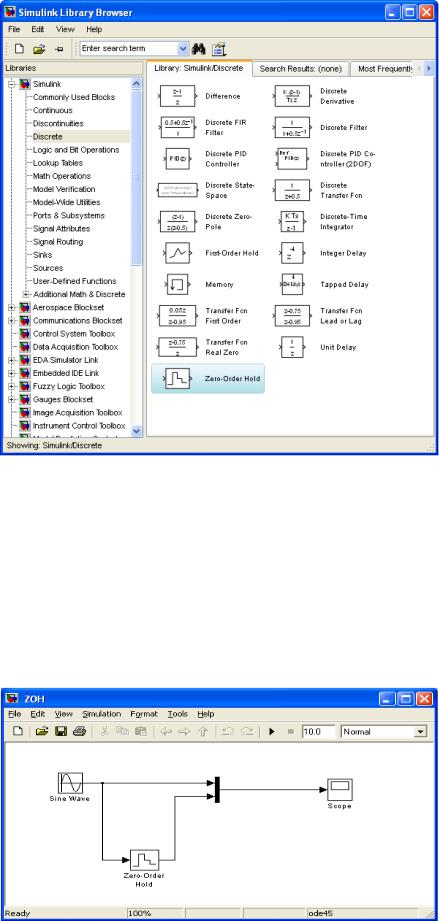
Для демонстрации работы фиксаторов нулевого и первого порядков можно использовать среду визуального проектирования Simulink системы MATLAB. Необходимые для этого блоки представлены в разделе Discrete библиотеки Sumulink (рисунок 5.3).
33
Рисунок 5.3 Содержимое раздела Discrete библиотеки Sumulink
Понадобится также раздел Sources библиотеки Simulink, в котором содержатся блоки, представляющие источники различных сигналов. В качестве исходного сигнала, который подвергается квантованию (дискретизации), выберем сигнал синусоидальной формы (блок Sine Wave).
Для одновременной визуализации сигналов, как исходного, так и результирующего, можно использовать блок «Осциллограф» (Scope в разделе Sinks), предварив его блоком «Мультиплексор» (Mux в разделе Signal Routing). Модель, с помощью которой можно продемонстрировать функциональность фиксатора нулевого порядка, показана на рисунке 5.4.
Рисунок 5.4 Функциональная схема, демонстрирующая работу фиксатора нулевого порядка

34
Параметры для блоков, использованных в проекте, задаются в полях ввода окон, отображаемых на экране, при двойном щелчке мышью на соответствующем блоке (рисунки 5.5 и 5.6).
Рисунок 5.5 Окно параметров блока Sine Wave
Рисунок 5.6 Окно параметров блока Zero-Order Hold
35
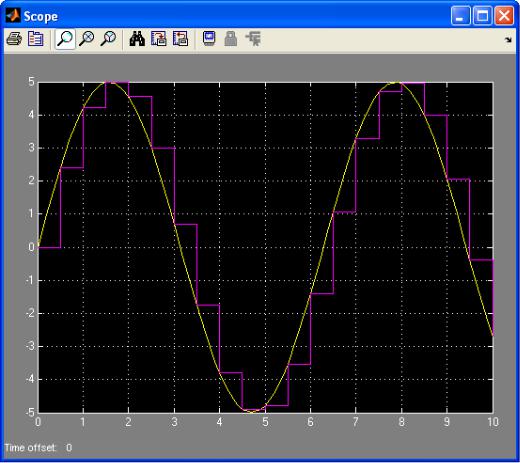
После задания параметров выполняется моделирование, запускаемое нажатием кнопки с пиктограммой в окне проекта. Визуализация результатов моделирования осуществляется в окне, которое появляется при двойном щелчке мышью на блоке Scope (рисунок 5.7).
Рисунок 5.7 Визуализация результатов моделирования
5.2. Индивидуальные задания по лабораторной работе
Задание 1. Проанализировать параметры, использующиеся в блоках Sine Wave и Zero-Order Hold. Записать формулу, которая используется для генерации исходного синусоидального сигнала, и объяснить назначение всех параметров, использующихся в формуле.
Задание 2. Построить функциональную схему для демонстрации работы фиксатора нулевого порядка. Задать параметры для блоков схемы Sine Wave и Zero-Order Hold. Выполнить моделирование и отобразить его результаты в окне Scope. Проанализировать полученные результаты.
Изменить параметры моделирования, в частности величину периода дискретизации (квантования) для блока Zero-Order Hold, снова выполнить моделирование и визуализацию его результатов. Проанализировать результаты и сравнить с полученными ранее. Сформулировать выводы относительно работы фиксатора нулевого порядка.
36
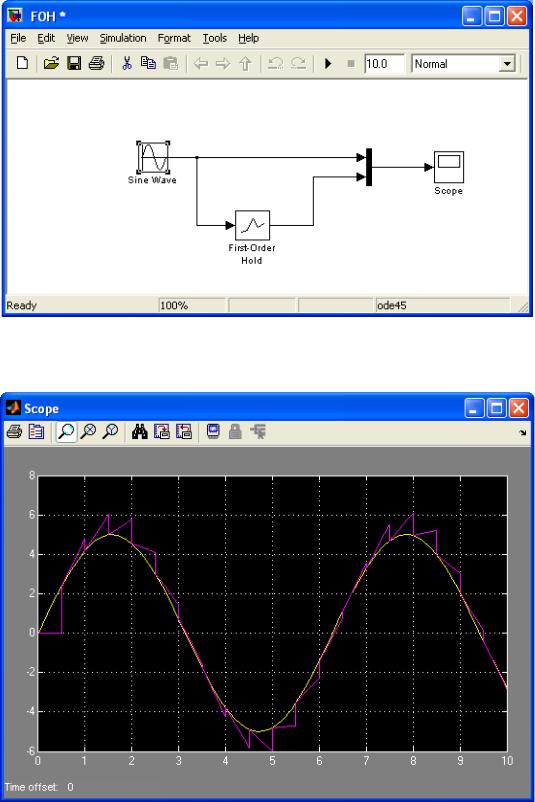
Задание 3. Построить функциональную схему для демонстрации работы фиксатора нулевого порядка (рисунок 5.8). Задать параметры для блоков схемы Sine Wave и First-Order Hold. Выполнить моделирование и отобразить его результаты в окне Scope (рисунок 5.9). Проанализировать полученные результаты.
Рисунок 5.8 Функциональная схема, демонстрирующая работу фиксатора первого порядка
Рисунок 5.9 Визуализация результатов моделирования
37
Изменить параметры моделирования, в частности величину периода дискретизации для блока First-Order Hold, снова выполнить моделирование и визуализацию его результатов. Проанализировать результаты и сравнить с полученными ранее. Сформулировать выводы относительно работы фиксатора первого порядка.
5.3. Контрольные вопросы к лабораторной работе
1. Что такое квантование (дискретизация) сигнала? Какие виды квантования известны? Что называется интервалом квантования (периодом дискретизации)?
2.В чѐм отличие квантования по времени от квантования по уровню?
3.Что такое квантование по времени и по уровню?
4.Какой преобразующий элемент называется фиксатором (экстраполятором) нулевого порядка?
5.Какой преобразующий элемент называется фиксатором (экстраполятором) первого порядка?
6.Описать процедуру моделирования квантования сигнала в среде визуального моделирования Simulink?
Заключение
Теоретические знания и практические навыки анализа и синтеза цифровых систем управления являются необходимой частью профессиональных компетенций, приобретаемых в процессе подготовки бакалавров по направлению 15.03.04 «Автоматизация технологических процессов и производств». Использование современных инструментальных средств, представленных многофункциональными программными пакетами для выполнения инженернотехнических расчѐтов и моделирования, позволяет более детально изучить особенности решения этих задач применительно к изучаемой предметной области, приобрести навыки практического использования этих средств. Эти знания и навыки оказываются востребованными при углублѐнном изучении и проектировании цифровых (микроконтроллерных) систем управления технологическими объектами и процессами.
38
Список использованных источников
1.Олссон, Г. Цифровые системы автоматизации и управления [Текст] / Г. Олссон, Д. Пиани; пер. с англ. СПб.: Невский Диалект, 2001. 557 с.
2.Цифровые системы управления [Электронный ресурс] : учеб. пособие / В. В. Григорьев, С. В. Быстров, В. В. Бойков, Г. И. Болтунов, О. К. Мансурова. СПб. : СПбГУ ИТМО, 2011. 133 с. ЭБС «Единое окно доступа к образовательным ресурсам».
3.Ливенцов, С. Н. Цифровые системы управления [Электронный ресурс] : учебно-методическое пособие / С. Н. Ливенцов, Н. В. Ливенцова. Томск : Изд-во Томского политехнич. университета, 2009. 45 с. ЭБС «Единое окно доступа к образовательным ресурсам».
4.Стариков, А. В.Цифровые системы управления [Электронный ресурс]: методич. указания. для самостоят. работы по направлению подготовки бакалавра 15.03.04 – Автоматизация технологических процессов и производств / А. В. Стариков; М-во образования и науки РФ, ФГБОУ ВО «ВГЛТУ». – Воронеж, 2016. – 8 с. – ЭБС ВГЛТУ.
Содержание
Введение…………………. ……………………………………………………… 3
Лабораторная работа №1 Обработка числовых массивов и матриц в системе Matlab ………………………………… 4
Лабораторная работа №2 Работа с комплексными числами и вычисление корней полиномов в системе Matlab ……. 11
Лабораторная работа №3 Решение обыкновенных дифференциальных уравнений в системе Matlab ………………….. 16
Лабораторная работа №4 Решение разностных уравнений рекуррентным методом и методом z-преобразования в системе Matlab.………………………………… 24
Квантование и восстановление сигналов управления. Моделирование работы фиксаторов нулевого и первого порядков в среде визуального моделирования Simulink.……….. 32
Заключение……………….……………………………………………………… 37
Список использованных источников...……………………………………….. 38
39
Стариков Александр Вениаминович
Цифровые системы управления
Методические указания
клабораторным работам для студентов по направлению подготовки 15.03.04
–Автоматизация технологических процессов и производств
Редактор С. Ю. Крохотина
Подписано в печать |
Формат бумаги |
Заказ |
|||
Объем |
п.л. |
Усл. п.л. |
Уч-изд. л. |
Тираж |
|
ФГБОУ ВО «Воронежский государственный лесотехнический университет имени Г.Ф. Морозова»