

2223
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Воронежская государственная лесотехническая академия
УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ
Методические указания к курсовому проекту для студентов специальности 240400 (190702) – «Организация и безопасность движения»
Воронеж 2007
2
УДК 656.13 (075)
Зеликов, В.А. Управление техническими системами [Текст]: методические указания к курсовому проекту для студентов специальности 240400 (190702) – Организация и безопасность движения / В.А. Зеликов; Фед. агентство по образованию, Гос. образовательное учреждение высш. проф. образования, Воронеж. гос. лесотехн. акад. – Воронеж 2007. – 27 с.
Печатается по решению редакционно-издательского совета ВГЛТА Рецензент доц. кафедры тракторов и автомобилей ВГАУ канд. тех. наук,
О.М. Костиков
3
Оглавление
Введение |
4 |
|
1 |
Цель проектирования |
5 |
2 |
Различные виды структурных систем с регуляторами |
6 |
3 |
Общий подход проектирования регулятора |
8 |
3.1 |
Эффект введения производной |
10 |
|
3.2 |
Эффект введения интеграла |
14 |
|
3.3 |
Проектирование ПИД-регулятора |
16 |
|
4 |
Примеры проектирования регуляторов |
17 |
|
4.1 |
Пример проектирования ПД-регулятора |
18 |
|
4.2 |
Пример проектирования ПИ-регулятора |
19 |
|
4.3 |
Пример проектирования ПИД-регулятора |
21 |
|
5 |
Исследование систем на устойчивость |
23 |
|
6 |
Задание на курсовой проект |
24 |
|
Библиографический список |
26 |
||
4
ВВЕДЕНИЕ
Проектирование регуляторов во временной области связано с использованием временных свойств и особенностей проектируемой системы. Управление техническими системами показывает, что имеется однозначная связь между временными свойствами системы и характеристиками передаточной функции на комплексной плоскости. Таким образом, проектирование линейной системы управления может быть проведено, базируясь на представлении о полюсах и нулях передаточной функции на комплексной плоскости.
5
1 ЦЕЛЬ ПРОЕКТИРОВАНИЯ
Как известно, временные особенности линейной системы управления отражаются характером переходного процесса и установившимся значением выходной переменной при воздействии сигналов некоторого вида на ее входе. В зависимости от цели проектирования, в качестве таких сигналов принимаются единичный скачок, линейно нарастающая функция или функции времени другого вида. При единичном скачкообразном входном воздействии качество системы чаще всего оценивают максимальным перерегулированием (в процентах) и временем регулирования. Для оценки относительной устойчивости системы могут быть также использованы коэффициент демпфирования и частота собственных колебаний. Эти величины, строго говоря, определены только для систем второго порядка. Для систем более высокого порядка эти параметры имеют смысл только в случае, когда соответствующие пары (комплексносопряженных) полюсов передаточной функции замкнутой системы оказывают доминирующее влияние на динамические свойства системы. Таким образом, при проектировании регулятора по желаемым временным характеристикам в качестве критерия чаще всего выбирается максимум перерегулирования.
В общем случае, динамическая линейная система управления может быть представлена в виде структуры, показанной на рис. 1.
_ |
|
_ |
|
u (t) |
|
с(t) |
|
W(p) |
|||
|
Управляемые переменные |
||
Векторуправления |
|
||
|
|||
|
|
(выходной вектор) |
Рис. 1 Общий случай динамической линейной системы управления
Цель проектирования состоит в получении управляемых переменных,
отражаемых выходным вектором c(t), ведущих себя некоторым желаемым об-

6
разом. При заданной неизменяемой части системы задача, по существу, состоит в определении управляющего сигнала u(t) в определенном временном интерва-
ле таким образом, чтобы цель проектирования была бы достигнута.
2 РАЗЛИЧНЫЕ ВИДЫ СТРУКТУРЫХ СИСТЕМ С РЕГУЛЯТОРАМИ
Большинство стандартных методов проектирования систем управления сводится к использованию регуляторов известной структуры, когда разработчик вначале задается общей конфигурацией проектируемой системы и определяет в ней место регулятора. Задача заключается в выборе параметров регулятора. Поскольку в большинстве случаев целью управления является изменение или компенсация характеристик качества системы, проектирование, использующее регуляторы заданной структуры, называют еще компенсацией.
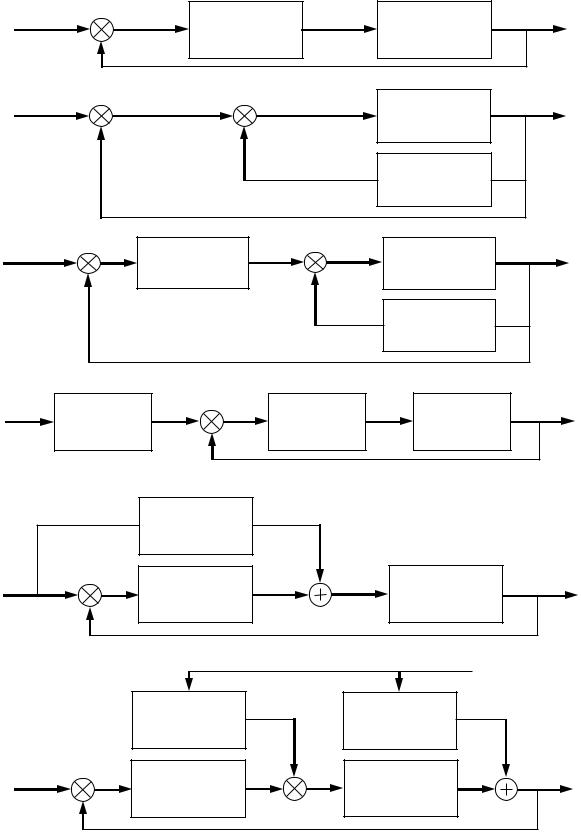
Рис. 2 иллюстрирует некоторые широко используемые структурные схемы компенсации с помощью регуляторов. Чаще всего применяются системы, показанные на рис. 2,а. В этом случае регулятор включается последовательно с объектом; такая схема называется последовательной или каскадной компенсацией.
На рис. 2,б регулятор включен в цепь местной обратной связи; такая схема называется компенсацией обратной связью.
Схемы компенсации, показанные на рис. 2,а и 2,б, имеют одну степень свободы в том смысле, что каждая из них имеет один регулятор, даже если в нем можно изменить больше, чем один параметр. Недостатком таких схем является то, что они обладают весьма ограниченными возможностями для достижения требуемого качества системы. Например, если система проектируется для обеспечения некоторой степени устойчивости, она может иметь плохую чувствительность по отношению к изменению параметров, или, если корни характеристического уравнения выбираются таким образом, чтобы добиться определенной степени демпфирования, перерегулирование переходной характеристики может оказаться недопустимо большим.
|
|
|
|
|
|
7 |
|
|
|
|
|
|
r(t) |
|
|
e(t) |
Регулятор |
|
u(t) |
|
Объект |
|
с(t) |
||
|
+ |
¯ |
|
|
|
Wp(p) |
|
|
|
W0(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e(t) |
|
|
а) |
|
|
|
|
|
r(t) |
|
|
|
|
|
u(t) |
|
|
W0(p) |
|
с(t) |
|
|
+ |
¯ |
|
|
+ |
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Wp(p) |
|
|
r(t) |
|
|
|
|
|
e(t) |
б) |
u(t) |
|
|
|
с(t) |
|
|
|
W1(p) |
|
|
|
W0(p) |
|
||||
+ |
|
¯ |
|
|
|
+ |
¯ |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Wp(p) |
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
r(t) |
|
W1(p) |
|
|
|
e(t) |
Wp(p) |
u(t) |
W0(p) |
с(t) |
||
|
|
|
+ |
|
|
|
|
|||||
|
|
|
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|
|
|
W1(p) |
|
|
|
|
|
|
|
|
r(t) |
|
|
|
|
|
|
+ |
d(t) |
|
0 |
|
с(t) |
|
|
|
|
|
|
|
|
|
||||
+ |
|
¯ |
|
Wp(p) |
|
|
|
|
|
t1 W0(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д) |
|
|
|
d(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wp1(p) |
|
|
|
|
Wp2(p) |
|
|
|
r(t) |
|
e(t) |
|
Wp(p) |
|
+ |
– |
|
с(t) |
|
+ |
+ с(t) |
+ |
|
|
|
|
|
|
|
W0(p) |
|
|
||
|
¯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е) |
|
|
|
|
|
Рис. 2 Различные виды структурных схем компенсации с помощью регуляторов |
||||||||||||

8
Рис. 2,в,г,д,е показывают схемы компенсации, которые имеют две степени свободы. Схема, представленная на рис. 2,в, называется последовательно компенсационной с обратной связью. Рис. 2,г и 2,д отражают так называемые схемы форсированной компенсации. На рис. 2,г регулятор, имеющий передаточную функцию W1 (p), включается последовательно с замкнутой системой,
которая имеет свой регулятор WP (p). На рис. 2,д форсирующий регулятор W1 (p)
включен в параллель с основным регулятором. Смысл такого включения дополнительного регулятора состоит в том, что регулятор не находится в контуре системы и, следовательно, не влияет на корни характеристического уравнения исходной системы. Полюса и нули W1 (p) в этом случае могут выби-
раться так, чтобы либо убирать, либо добавлять полюса и нули в передаточную функцию замкнутой системы.
На рис. 2,е представлена система управления с регулятором, имеющим две степени свободы и предназначенным для минимизации влияния возмущения d(t). Регулятор WP (p) выбирается таким образом, чтобы добиться требуемо-
го вида передаточной функции CR((pp)) как обычно, в то время как регуляторы
WP2 (p) осуществляют минимизацию или полное исключение влияния возмущения d(t). Регулятор WP2 (p) предназначен для того, чтобы имела бы физически реализуемую структуру.
3 ОБЩИЙ ПОДХОД ПРОЕКТИРОВАНИЕ РЕГУЛЯТОРА
Поскольку для систем, имеющих порядок выше двух, не существует простых и однозначных зависимостей между параметрами временных характеристик и передаточными функциями, проектирование регуляторов в общем виде для таких систем во временной области весьма затруднительно. Современная практика конструирования в значительной степени полагается на известные связи между временными особенностями и характеристиками качества и часто
9
использует регуляторы известных структур для решения возникающих задач. Многие разработчики полагаются также на метод проб и ошибок, который при современном уровне развития вычислительной техники не выглядит столь уж рутинным и может дать хорошие результаты.
В простейшем случае регулятор – просто усилитель с постоянным коэффициентом усиления k. Такой тип управляющего воздействия, вырабатываемый регулятором, известен как пропорциональное управление, поскольку управляющий сигнал на выходе регулятора формируется из входного сигнала путем простого умножения его на некоторую константу.
С математической точки зрения, линейный непрерывный регулятор, наряду с пропорциональным управлением, может также использовать производную и интеграл от входного сигнала. Таким образом, мы можем рассматривать непрерывный регулятор более общего вида, который состоит в общем случае из сумматоров (суммирование или вычитание), усилителей, дифференциаторов и интеграторов. В задачу разработчика входит определение, какие компоненты должны быть использованы, в какой пропорции и как они должны быть связаны между собой. Например, одним из широко известных регуляторов, используемых на практике, является ПИД-регулятор, название которого образовано от первых букв слов - пропорциональный, интегральный и дифференциальный. Передаточная функция ПИД-регулятора имеет вид
WP (p)= kП + k Д p + |
kИ |
, |
(1) |
|
p |
||||
|
|
|
где k П , k Д и kИ – действительные постоянные коэффициенты. В задачу проек-
тирования входит определение значений этих трех коэффициентов таким образом, чтобы качество системы удовлетворяло поставленным при проектировании требованиям. Исследование ПИД-регуляторана этомэтапе состоиттакже в понимании роли пропорциональной, дифференциальной и интегральной составляющей в формировании параметров временных характеристиксистемы управления. Рассмотрим вначале отдельноэффектвведенияпроизводнойиинтеграланапроцессуправления.
10
3.1 Эффект введения производной
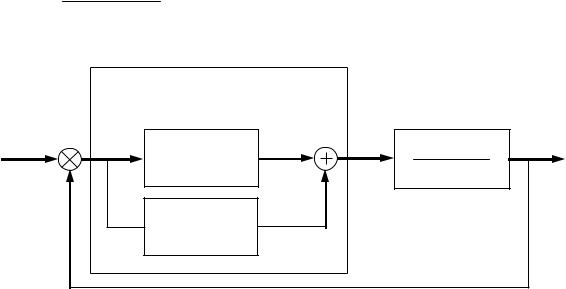
На рис. 3 представлена структурная схема замкнутой системы, объект управления в которой имеет передаточную функцию второго порядка
WO (p)= |
an2 |
|
p(p + 2 ξ an ). |
(2) |
|
|
Wp(p) |
|
|
|
R(p) |
E(p) |
U(p) |
0 |
an2 |
С(p) |
|
kп |
|
t1 |
|
|
|
+ |
+ |
p(p +2ξan ) |
|
|
|
¯ |
+ |
|
|
|
|
kдp |
|
|
|
|
Рис. 3 Структурная схема замкнутой системы |
|
|
|
||
Передаточная функция последовательного ПД-регулятора имеет вид:
WP (p)= kП + k Д p .
(3)
Управляющийсигнал(сигналнавыходерегулятора) определяетсяпоформуле
u(t)= kП e(t)+ k Д |
de(t) |
, |
(4) |
|
d(t) |
||||
|
|
|
где e(t) – рассогласование (ошибка).
Передаточная функция разомкнутой системы определяется по формуле
W (p)=W |
|
(p) W |
|
(p)= |
C(p) |
|
= |
an2 (kП + k Д p) |
. |
(5) |
P |
O |
E(p) |
|
|||||||
|
|
|
|
p (p + 2 ξ an ) |
|
|||||
|
|
|
|
|
|
|
||||
Из формулы (5) видно, что ПД-управление эквивалентно добавлению