

2223
.pdf
|
|
11 |
|
простого нуля p = − |
kП |
в передаточную функцию разомкнутой системы. |
|
k Д |
|||
|
|
Эффект влияния производной на переходную характеристику в системе с обратной связью может быть рассмотрен на примере переходной характеристики, показанной на рис. 4.
c(t)
1
0 |
t2 |
t3 |
t4 |
t5 |
t |
t1 |
а)
е(t)
1
0
t1 |
t2 |
t3 |
t4 |
t5 |
t |
б)
dе(t) dt
0
t1 |
t2 |
t3 |
t4 |
t5 |
t |
в)

12
Рис.4 Переходные характеристики систем Предположим, что переходная характеристика системы только с пропор-
циональным управлением имеет вид, показанный на рис. 4,а, из которого видно, что существует сравнительно большое перерегулирование и колебательность процесса. Соответствующий сигнал рассогласования (ошибки) e(t), рав-
ный разности между единичной функцией на входе и с(t), и его производная по времени ded((tt)) показаны рис. 4,б и 4,в соответственно.
Перерегулирование и колебательность отражаются, естественно, в кри-
вых e(t) и ded((tt)). Если предположить, что физически система содержит двига-
тель, момент на валу которого пропорционален e(t), большое перерегулирова-
ние и, как следствие, колебательность выходной переменной с(t) обуславлива-
ется избыточным моментом двигателя и отсутствием демпфирования на интервале времени 0<t< t1, в течение которого сигнал рассогласования положителен. Для интервала t1< t< t3 e(t) отрицателен, соответствующий ему момент двига-
теля также отрицателен. Этот отрицательный момент стремится снизить ускорение выходной координаты и в итоге приводит к тому, что выход принимает значения меньше, чем единица (интервал времени t3<t<t5). Но в течение этого интервала момент двигателя снова положителен, и он стремится ликвидировать уменьшение с(t), вызванное отрицательным моментом на предшествующем ин-
тервале. Поскольку система предполагается устойчивой, амплитуда ошибки снижается с каждым колебанием и, в итоге, выход стремится к своему установившемуся значению.
Рассматривая такое толкование процесса, можно отметить, что факторы, способствующие перерегулированию, состоят в следующем: (1) положительный корректирующий момент двигателя в интервале 0<t<t1 слишком велик, а
(2) тормозящий момент в интервале t1<t<t2 недостаточен. Следовательно, для

13
уменьшения перерегулирования переходной характеристики без существенного уменьшения времени регулирования логично было бы уменьшить положительный корректирующий момент во время 0<t<t1 и увеличить тормозной момент при t1<t<t2. Аналогично, в течение временного интервала t2<t<t4, отрицательный корректирующий момент во время t2<t<t3 должен быть уменьшен, а тормозной момент в интервале t3<t<t4, который пока имеет положительное направление, должен быть увеличен, чтобы предотвратить спад кривой с(t).
ПД-управление, показанное на рис. 3, как раз и обеспечивает такую коррекцию. Поскольку управляющий ПД-сигнал дается выражением (4), рис. 4,в показывает, что за время 0<t<t1 производная от рассогласования отрицательна, и это само по себе снижает момент, образуемый за счет e(t). В интервале вре-
мени t1<t<t2 и e(t) и ded((tt)) отрицательны, что означает, что отрицательный под-
тормаживающий момент в результате будет больше, чем при только пропор-
циональном управлении. Так как e(t) и ded((tt)) будут иметь разные знаки в интер-
вале времени t2<t<t3; следовательно, отрицательный момент, который способствует перерегулированию в обратную сторону, также снижается. Следствием этого является то, что эти эффекты приводят к меньшим перерегулированию и "провалу" кривой с(t).
Иное объяснение эффекта введения производной состоит в том, что, по-
скольку ded((tt)) представляет собой наклон e(t), то ПД-управление есть, по суще-
ству, упреждающее управление. Обычно в линейных системах большому наклону e(t) или с(t), вызываемому «ступенькой» на входе, соответствует и боль-
шее значение последующего перерегулирования. При управлении по производной измеряется текущий наклон кривой e(t), заблаговременно предсказывается большое перерегулирование и предпринимаются соответствующие меры еще до того, как такое перерегулирование произойдет.
14
Очевидно, что управление с учетом производной будет влиять на установившуюся ошибку системы только в том случае, если эта ошибка изменяется во времени. Если же она остается постоянной, производная по времени от нее равна нулю, и управление по производной не оказывает влияния на установившуюся ошибку. Однако, если установившаяся ошибка увеличивается со време-
нем, снова вырабатывается момент, пропорциональный ded((tt)), который будет
стремиться уменьшить значение ошибки.
При проектировании ПД-регулятора надо иметь в виду, что, с одной стороны, основные составляющие управления по производной благоприятно влияют на увеличение демпфирования и снижение перерегулирования, но, с другой стороны, такой регулятор может вносить и отрицательные эффекты в процесс управления.
3.2 Эффект введения интеграла
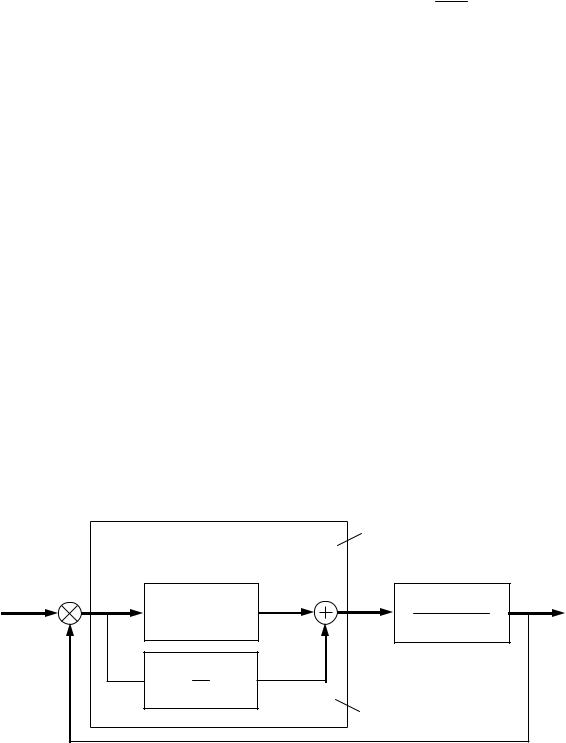
Интегральная составляющая ПИД-регулятора формирует сигнал, который пропорционален интегралу от рассогласования на входе регулятора. На рис. 5 представлена структурная схема системы управления, объект в которой – звено второго порядка с передаточной функцией W0 (p), а регулятор – пропорцио-
нально-интегрального (ПИ) типа.
|
|
ПИ-регулятор |
|
||
|
|
Wp(p) |
|
|
|
R(p) |
E(p) |
U(p) |
0 |
an2 |
С(p) |
|
kп |
|
t1 |
|
|
|
+ |
+ |
p(p +2ξan ) |
|
|
|
¯ |
+ |
|
|
|
|
kи |
|
|
W0(p) |
|
|
|
|
|
|
|
|
p |
Wp(p) |
|
|
|
|
|
|
|
|
|

15
Рис. 5 Структурная схема системы управления второго порядка Передаточная функция такого регулятора имеет вид:
Wp (p)= kП + kpИ .
Передаточная функция разомкнутой системы равна:
W (p)=W0 (p) WP (p)= |
an2 (kП p + kИ ) |
|
|
. |
|
p2 (p + 2 ξ an ) |
||
(6)
(7)
Из формулы (7) видно, что ПИ-регулятор добавляет к передаточной
функции разомкнутой системы нуль |
p = |
kИ |
и полюс p = 0 . Ясно также, что |
|
kP |
||||
|
|
|
эффект интегрального управления увеличивает порядок системы на единицу и на единицу повышает порядок ее астатизма (по отношению к исходной, без интегрального управления, системе), т.е. если для заданного входного сигнала установившаяся ошибка постоянна, то при интегральном управлении она сводится в принципе к нулю (предполагается, естественно, что система устойчива). Кроме того, при регуляторе, имеющем передаточную функцию (6), замкнутая система, изображенная на рис. 5, будет иметь также нулевую скоростную ошибку, т.е. ошибку на выходе при входном воздействии в виде линейно нарастающей функции. Однако, поскольку система становится системой третьего порядка, она может стать менее устойчивой, чем исходная система (второго порядка), либо даже потерять устойчивость вообще, если параметры kП и k И выбраны неправильно.
В случае ПД-управления коэффициент kП очень важен, поскольку для систем, имеющих постоянную скоростную ошибку, ее значение обратно пропорционально kП . С другой стороны, если kП слишком велико, система может стать неустойчивой. Аналогично для систем, у которых при единичном входном воздействии установившаяся ошибка постоянна (и отлична от нуля), ее значение также обратно пропорционально kП .
16
Если же система приобретает порядок, больший на единицу, вследствие введения ПИ-регулятора, коэффициент kП уже не оказывает влияние на установившуюся ошибку, и она всегда равна нулю при линейно изменяющемся входном воздействии. Задача заключается в правильном выборе сочетания коэффициентов kП и k И так, чтобы динамика системы удовлетворяла поставленным требованиям.
3.3 Проектирование ПИД-регулятора
Из предшествующего рассмотрения видно, что ПД-регулятор увеличивает демпфирование системы, но не изменяет значения установившейся ошибки; ПИ-регулятор, наряду с возможным улучшением демпфирования, уменьшает установившуюся ошибку до нуля, однако увеличивает время переходного процесса. Поэтому представляется обоснованным использовать ПИД-регулятор, который совместил бы в себе лучшие свойства ПИ и ПД-регуляторов.
В качестве одного из возможных можно рекомендовать следующий подход при проектировании ПИД-регулятора систем автоматического управляется.
1 Представим себе, что ПИД-регулятор состоит из части ПИ и части ПД, включенных последовательно. Тогда передаточную функцию ПИД-регулятора можно записать следующим образом:
|
k |
И |
|
|
|
k |
П2 |
|
|
WP (p)= kП + k Д p + |
|
= (1 + k Д1 |
p) kП2 |
+ |
|
. |
(8) |
||
|
|
|
|
||||||
|
p |
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|||
В формуле (8) единица в первой скобке (отражающей пропорциональную составляющую ПД-части) записана в силу того, что определению подлежат только три коэффициента ПИД-регулятора. Приравнивая коэффициенты при одинаковых степенях p в обеих частях уравнения (8), имеем:
kП |
= kП2 + k Д1 kИ2 , |
(9) |
k Д |
= k Д1 kП2 , |
(10) |

17 |
|
kИ = kИ2 . |
(11) |
2 Предположим, что в действительности существует лишь ПИ-часть, и |
|
выберем значения kИ2 и kП2 так, чтобы |
выполнялись требования по времени |
переходного процесса в системе. Установившаяся ошибка системы при этом «улучшается» на порядок. На этом этапе пока не учитывается максимальное перерегулирование, которое может быть большим.
3 Используем ПД-часть для снижения максимального значения перерегулирования. Выберем значение кД1 так, чтобы удовлетворить требованиям по демпфированию системы.
4 Значения кп, кд и ки находятся теперь по формулам (9) – (11).
При альтернативном подходе мы можем сначала спроектировать ПДрегулятор путем выбора подходящего значения кД1. Возможно, что ПДрегулятор, сам по себе, не приведет к достижению поставленных целей. Тогда, в качестве следующего шага, проектируется ПИ-часть ПИД-регулятора так, чтобы удовлетворить требуемым показателям качества переходного процесса.
4 ПРИМЕР ПРОЕКТИРРОВАНИЯ РЕГУЛЯТОРОВ
Проиллюстрируем проектирование ПД-, ПИ- и ПИД регуляторов для системы управления третьего порядка. (Примеры заимствованы из Kuo B.C. Automatic control systems. Prentice-Hall of Indian, New Delhi, 1991.)
Допустим, что система с единичной отрицательной обратной связью описывается передаточной функцией
W0 (p)= |
k |
|
p (0,1 p +1) (0,2 p +1), |
(12) |
где k =100 , и необходимо добиться, чтобы установившаяся ошибка при входном воздействии на систему в виде линейно нарастающей функции была бы равна 100. Можно показать, что замкнутая система без регулятора будет неустойчивой, поскольку граничное значение k, отвечающее требованию устойчивости, в этом случае

18
равно 15, а при k =100 характеристическое уравнение системы имеет два комплекс- но-споряженныхкорня 3,8 ± j ×14,4 , сположительнойдействительнойчастью.
4.1 Пример проектирования ПД-регулятора
Рассмотрим сначала ПД-регулятор с передаточной функцией вида (3). Тогда передаточная функция разомкнутой системы будет равна:
|
|
|
|
|
|
k |
П |
|
|
|
|
|
5000 k |
|
p + |
|
|
|
|||
|
|
|
k |
|
|
|||||
|
|
|
Д |
|
|
Д |
|
|
||
W (p)=WP (p) W0 |
(p)= |
|
|
|
|
|
|
. |
(13) |
|
p (p +5) |
|
|
|
|
||||||
|
|
(p +10) |
|
|||||||
Целью проектирования регулятора является добиться скоростной ошибки, равной 100, при хорошей относительной устойчивости. Эта цель достигается, если предположить kП =1.
Исследуем эффект ПД-регулятора с помощью метода корневого годографа. Характеристическое уравнение замкнутой системы будет иметь вид:
p3 +15 p2 +(50 +5000 k Д ) p +5000 = 0 .
(14)
|
∞ ← kд |
|
+j |
|
|
|
|||
|
|
|
|
|
|
|
|
kд = 0,0567 |
|
Асимптота |
|
|
kд = 0 |
|
|
|
|
||
kд = 0 (-22,6) |
|
|
(3,8 + j 14,4) |
|
|
|
kд = ∞ |
||
|
|
|
||
|
|
|
|
+1 |
|
|
|
|
|
(-7,5) |
|
|
kд = 0 |
|
|
|
|
(3,8 – j 14,4) |
|
|
∞ ← kд |
|
kд = 0,0567 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 6 Корневой годограф, при изменении значения k Д
19
Корневой годограф, соответствующий уравнению (14) при изменении значения k Д , показан на рис. 6. Ограничение на ПД-регулятор для этой сис-
темы становится совершенно очевидным из этого рисунка. Несмотря на то, что два комплексных корня характеристического уравнения с ростом k Д пе-
реходят в левую полуплоскость, эффект демпфирования за счет увеличения значения k Д ограничен.
Напомним, что степень демпфирования системы второго порядка определяется значением коэффициента демпфирования, под которым здесь понимается отношение действительной части комплексно-сопряженных корней характеристического уравнения к его свободному члену. Если k Д растет, то два корня приближаются с фазами 900 и (-900), соответственно, к асимптоте (-7,5). Кроме того, если k Д становится очень большим, действительный корень будет очень близок к началу координат, что будет способствовать увеличению перерегулирования переходной характеристики. Таким образом, можно заключить, что хотя ПД-регулятор будет стабилизировать систему, степень демпфирования, которая при этом может быть достигнута, весьма ограничена. Можно показать, что при изменении значения k Д , перерегулирование для рассматриваемого
примера не может быть получено меньше, чем приблизительно 60 %. Кроме того, при большом значении k Д собственная частота колебаний будет выше и,
следовательно, ниже полоса пропускания системы, что не всегда допустимо по требованиям помехоустойчивости.
4.2 Пример проектирования ПИ-регулятора
Рассмотрим теперь объект, описываемый (12), управляемый ПИрегулятором с передаточной функцией вида (6). Тогда передаточная функция разомкнутой системы будет иметь вид:

20
|
|
|
|
|
kИ |
|
|
|
|
|
5000 kП |
|
|
|
|||
|
|
|
|
|||||
|
|
p + |
|
|
|
|||
W (p)=WP (p) W0 |
(p)= |
|
|
|
kП |
. |
(15) |
|
p2 |
|
|
|
|||||
|
|
(p +5) (p +10) |
|
|||||
ПИ-регулятор проектируется путем выбора значения kИ таким, чтобы оно kП
было значительно меньше, чем доминирующий полюс передаточной функции
W0 (p), который в этом случае |
p = −5 . |
Положим, |
kИ |
=1. После этого значение |
|
kП |
|||||
|
|
|
|
||
коэффициента kП выбирается |
таким, |
чтобы удовлетворить требованиям по |
|||
демпфированию системы. Поскольку нуль функции W0 (p) имеет место при (- 0,1), т.е. практически при очень малом значении, можно считать, что одна степень p в числителе и знаменателе в формуле (15) сокращается, и, приближенно переходную характеристику, можно записать в следующим в виде:
W (p)≈ |
5000 kП |
(16) |
p (p +5) (p +10). |
Заметим, что эта передаточная функция аналогична функции (12), за исключением сомножителя kП . Таким образом, мы можем выбрать значение kП
по условию желаемого демпфирования системы. Можно показать, что если в формуле (12) kП =1,63 , то коэффициент демпфирования (за счет комплексных корней) будет 0,707.