

2446
.pdfвизуализации Simulink позволяют получить упрощенные изображения трехмерных механизмов как в статике, так и в динамике [3, 5].
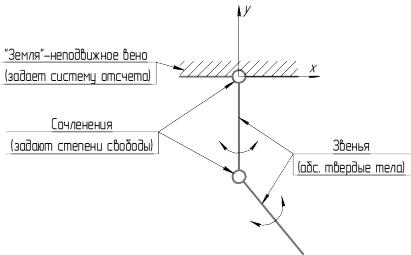
При использовании SimMechanics вместо того, чтобы выводить математическую модель системы, составляется представление, описывающее компоненты механической системы (тела, шарниры и т.д.). В нашем случае маятник представляется телом, присоединенным шарниром к неподв жному звену – базе (земле) (рис. 182) [3, 5].
Блоки в б бл отеке SimMechanics имеют специальные имена,
которые точно оп сывают их назначение. Например, вращательный |
|||
шарнир в маятн ке называется Revolute, подвижное звено (тело) – |
|||
С |
|
|
|
Body, |
неподв жное звено |
|
|
(земля) – Ground.Что ы по- |
|
|
|
|
SimMechanics- |
|
|
модель маятн ка нужно пе- |
|
|
|
строить |
|
|
|
ренести |
соответствующие |
|
|
блоки в окно модели и со- |
|
|
|
единить их вместе. Блоки |
|
|
|
SimMechanics имеют специ- |
|
|
|
альные порты, которые со- |
|
|
|
единяются линиями. Эти со- |
|
Рис. 183. |
|
единительные линии не пе- |
|
|
|
|
бА |
||
редают данные, а представляют |
собой механические связи между |
||
|
|
Д |
|
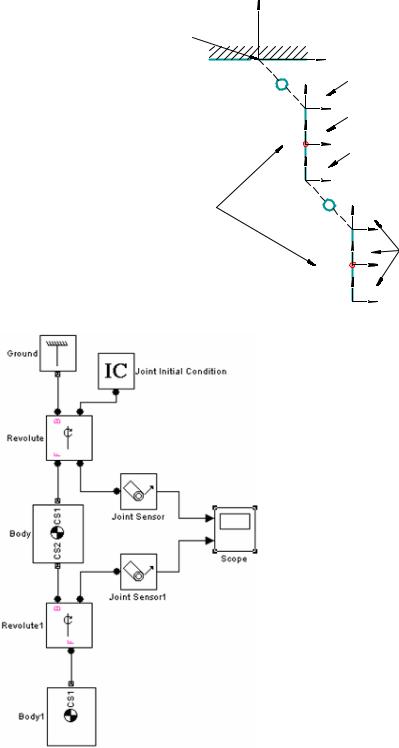
элементами системы. Соединительные линии и специальные порты не могут напрямую подключаться к стандартным блокам Simulink и линиям. Датчики позволяют измерять положениеИ, скорость и ускорение
элементов механической системы. В модели маятника можно измерить угол (AP) и угловую скорость (AV) на вращательном шарнире
(рис. 183) [3, 5].
Моделирование SimMechanics-моделей отличается от моделирования обычных Simulink-моделей. При запуске SimMechanics анализирует механическую систему для определения топологии и геометрии механизма. Во время моделирования внешние силы и моменты, прикладываемые к механизму, интегрируются и состояние механической системы обновляется. Так как модель может содержать ог-
91
раничения, решатель проверяет все элементы механизма в пределах допустимых отклонений [3, 5].
Любой механизм можно представить в виде совокупности звеньев и сопряжений. Например, двухзвенный физический маятник С(рис. 184) представляет собой последовательное соединение следую-
щих элементов [3, 5]:
неподв жного звена (земли);шарн рного соединения (задающего 1-му звену одну степень
плоскостисвободы – поворот вокруг оси z);
первого звена (звено представляется как абсолютное твердое тело);
шарнбАрного соединения между 1-м и 2-м звеньями (ограничивает степени сво оды 2-го звена, оставляя также только поворот в
xy);
второго звена.
Д Рис. 184. И
SimMechanics-модель такого механизма строится в аналогичной последовательности (рис. 185) [3, 5].
Исходным элементом модели является звено Ground – земля. К нему присоединен элемент – Revolute (т.е. сопряжение, позволяющее следующему звену лишь поворачиваться вокруг указанной оси z). Далее следует непосредственно звено физического маятника Body. В качестве параметров этого звена необходимо указать массу тела, моменты инерции относительно главных центральных осей симметрии,
92
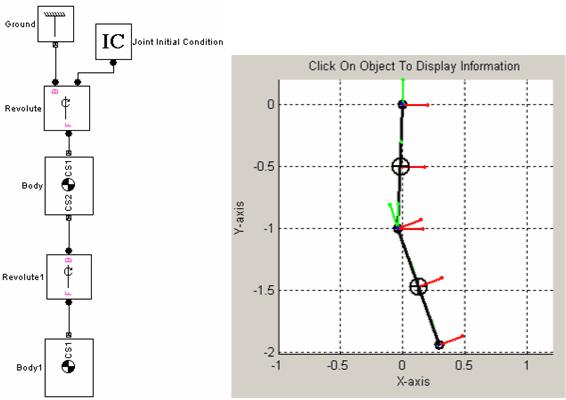
а также координаты верхнего, нижнего концов звена и его центра масс. При этом координаты можно задавать как в глобальной системе координат (ГСК), так и в локальной системе координат (ЛСК) зве-
на [3, 5].
Си бАа Рис. 185. б
Чтобы звенья спроектированногоДмеханизма начали движение необходимо либо добавить вынуждающую силу, либо задать начальные условия (например, начальное отклонение или сообщить началь-
Аналогично к первому звену посредством шарнирного соедине-
ния Revolute 1 присоединяется второе звено Body 1.
ную скорость). Для реализации последних используется блок
InitialCondition [3, 5]. |
И |
На модели имитации отображаются звенья, колеблющиеся по законам классической механики (физики твердого тела). Там же отображаются локальные системы координат (ЛСК) звеньев.
93
Вопрос о выборе той или иной системы координат (СК) является |
||||||||
очень важным. Правильный выбор СК значительно облегчает моде- |
||||||||
лирование механизма и интерпретацию результатов. |
|
|||||||
При моделировании данного механизма использовались сле- |
||||||||
дующие |
К (рис. 186) [3, 5]. |
|
|
|
|
|
||
|
|
|
|
y |
|
|
|
|
Точка сопряжения неподвижного звена |
|
Неподвижное звено |
|
|
||||
с подв жным является началом ГСК |
|
|
|
|||||
|
|
x |
|
|
|
|||
С |
|
|
|
|
|
|
||
|
Сопряжение |
|
Вначале удобно задать координаты верхнего конца CS1, |
|||||
|
CS1 |
т.к. |
он совпадает с точкой сопряжения |
|||||
|
|
|
Положение ЦМ (CG) удобно в ЛСК CS1 |
|
||||
|
Верхнее звено |
|
||||||
|
|
|
|
|||||
|
|
|
CG |
|
|
|
||
|
|
|
|
|
цм |
Положение нижнего конца звена CS2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
CS2 |
здается в ЛСК CS1 (или ЛСК CG) |
|
|
|
|
|
|
|
|
|
|
|
Для каждого звена нео ход мо задать |
|
Сопряжение |
|
|
|
|||
коорд наты его онцов |
центра масс |
|
|
|
|
|||
|
|
|
CS1 |
|
|
|||
и |
|
|
|
|
||||
|
Нижнее звено |
Параметры задаются аналогично |
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
CG |
||
|
|
|
|
|
|
параметрам верхнего звена |
||
|
|
|
|
|
|
цм1 |
|
|
|
|
|
|
|
|
CS2 |
|
|
|
|
|
|
|
Рис. 186. |
|
|
|
|
|
|
|
|
Неподвижная глобальная сис- |
|||
|
|
|
|
|
тема координат ГСК Global находит- |
|||
|
бАся в точке сопряжения неподвижного |
|||||||
|
|
|
|
|
звена с верхним звеном (коленом ма- |
|||
|
|
|
|
|
ятника). Задавать координаты точек |
|||
|
|
|
|
|
верхнего звена маятника можно раз- |
|||
|
|
|
|
|
личнымиДспособами, в том числе, |
|||
|
|
|
|
|
просто перечислив их значения в |
|||
|
|
|
|
|
ГСК. Однако это не всегда удоб- |
|||
|
|
|
|
|
но. Верхний конец первого звена со- |
|||
|
|
|
|
|
прягается с неподвижным звеном, и |
|||
|
|
|
|
|
|
И |
||
|
|
|
|
|
поэтому его координаты совпадают с |
|||
|
|
|
|
|
началом ГСК. Его координаты дейст- |
|||
|
|
|
|
|
вительно легко задать как Global [0, |
|||
|
|
|
|
|
0, 0]. |
Пусть |
звено имеет |
длину L и |
|
Рис. 187. |
|
|
симметрию |
относительно |
главной |
||
|
|
|
|
|
94 |
|
|
|
центральной оси инерции (ГЦОИ). Положение центра масс (ЦМ) звена удобно задавать уже не в ГСК а в только что созданной ЛСК, где началом координат является верхний конец звена, т.е. в ЛСК CS1. Тогда координаты ЦМ можно задать как CS1 [0, -L/2, 0]. Аналогично
Сна. Ее начало может не совпадать с точкой сопряжения неподвижного звена (тем олее, когда неподвижных звеньев в механизме не-
нижний конец звена можно задать в ЛСК CS1 [0, -L, 0] [3, 5].
Несмотря на то, что начало ЛСК CS1 совпадает с началом ГСК
Global, следует меть в виду, что ЛСК CS1 принадлежит верхнему
звену, а знач т, может поворачиваться относительно точки Global [0, 0, 0]. Глобальная же с стема координат ГСК Global всегда неподвиж-
сколько). Пом мо в зуального на людения за свободными (при заданачальных услов ях) или вынужденными колебаниями (при на-
ложен |
внешней с лы) можно анализировать законы движения лю- |
нии |
|
бой точки механ зма. Для этого необходимо при задании координат |
|
звеньев указать коорд наты интересующей точки и к выходу соответ- |
|
ствующего Simulinkлока подключить блок-датчик (Sensor). |
|
|
б |
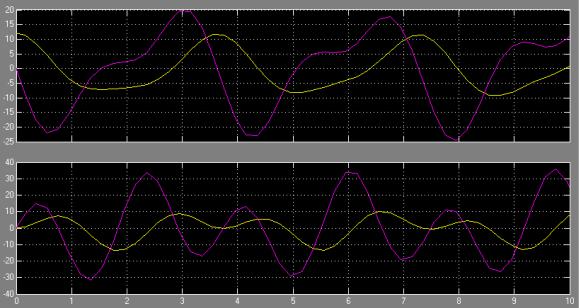
Датчики могут регистрировать как угловые колебания, так и ли- |
|
нейные, |
причем как перемещение, так и скорость, и ускорение |
(рис. 187). Выход с датчика обычно выводят на блок осциллографа |
|
Scope (рис. 188) [3, 5]. |
|
А |
|
|
Д |
|
И |
Рис. 188.
95
Порядок выполнения работы:
1. |
Ознакомьтесь с пакетом SimMechanics. |
2. |
оберите в SimMechanics модель двухзвенного физического |
маятника и проведите ее анализ. |
|
С |
|
3. |
Задайте начальное положение маятника 12 deg. |
4. |
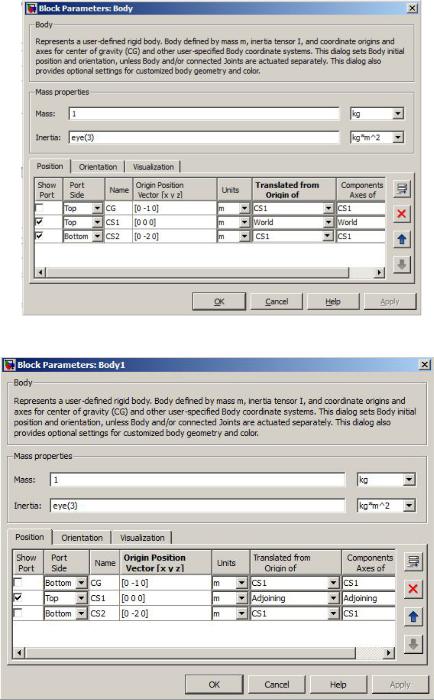
Настройте параметры звеньев (рис. 189, 190). |
и |
|
|
бА |
|
Рис. 189. |
|
Д |
|
И |
Рис. 190.
96
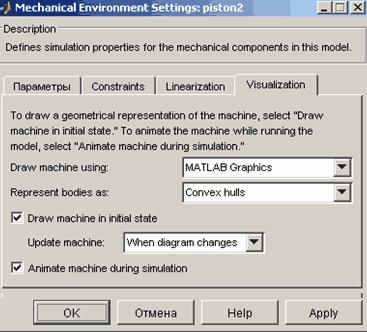
5. В меню Simulation выберите пункт Mechanical Environment.
Здесь можно задать параметры механического моделирования (значения ускорения свободного падения, точность расчетов, способ отображения работы механизма и пр.). Внесите изменения только во
С |
|
|
вкладку Visualisation (рис. 191). |
|
|
и |
|
|
|
бА |
|
|
Рис. 191. |
|
6. |
Д |
|
Запустите модель, при этом наблюдая за колебаниями маят- |
||
ника. Проварьируйте начальные условия. |
|
|
|
Контрольные вопросы и задания |
|
1. |
|
И |
Перечислите библиотеки пакета SimMechanics. |
||
2. |
Поясните особенности имитационного моделирования кине- |
|
матических механизмов в Simulink. |
|
|
3. |
Что вы знаете про глобальные и локальные системы коорди- |
|
нат механизмов? |
|
|
4. |
Что вы знаете про задание законов движения звеньям меха- |
|
низмов и их исследование? |
|
|
97
Заключение
Представленные материалы позволят студентам в рамках изучаемых дисциплин освоить необходимые компетенции, а также подготовиться к дипломному проектированию.
При составлении данного учебно-методического пособия были использованы труды Богатова Н.М., Кудрявцева Е.М., Махова А.А., а
также учебные |
материалы |
по освоению КОМПАС-3D ЗАО |
«А КОН». |
|
|
С |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК |
|
|
||
1) Азбука КОМПАС-3D V14. – Москва : ЗАО «АСКОН», 2013. – 412 с. |
||
и |
|
|
2) Богатов, Н.М. Практические задания по компьютерному моделирова- |
||
бА |
||
нию в нструментальной среде Компас 3D LT : практикум / Н.М. Богатов, |
||
Л.Р. Григорян, О.Е. |
Митина. – |
Краснодар : Кубанский госуниверситет, |
2011. – 57 с.
3) Игнатов, С.Д. Моделирование механических систем при помощи расширений Simulink [Электронный ресурс] : учебное пособие / С.Д. Игнатов, С.В. Котькин. – Электрон. дан. – Омск : Сиб И, 2016.– Режим доступа: http://bek.sibadi.org/fulltext /esd205.pdf. – Загл. с экрана (дата обр.: 28.06.18).
4)Кудрявцев, Е.М. КОМП С-3D V6. Основы работы в системе / Е.М. Кудрявцев. – М. : Изд-во «ДМК Пресс», 2004. – 528 с.
5)Махов, А.А. Моделирование механических систем с помощью пакета расширения SimMechanics [Электронный ресурс] / А.А. Махов. – Электрон. дан. –
Режим доступа: http://exponenta.ru/educat/systemat/mahov/simmechanics.asp. –
Загл. с экрана (дата обр.: 28.06.18).
6)URL: http://cadinstructor.org/cg/kompas_3d/1-osnovnie-priyemi-chercheniya/. –
Загл. с экрана (дата обр.: 28.06.18).
7)URL: http://cadinstructor.org/cg/kompas_3d/2-operatcia-vidavlivanie/. –
Загл. с экрана (дата обр.: 28.06.18). ДИ
98