

2437
.pdfпредполагает сканирование местности или изображения параллельными маршрутами с шагом, равным размеру элемента геометрического разрешения.
Сканирование фотоснимков выполняется с помощью оп- тико-электронных приборов – сканеров, которые по принципу исполнения можно разделить на роликовые, планшетные и барабанные, а по точности и назначению – на офисные и фотограмметрические.
Роликовые сканеры имеют малый формат, неподвижную считывающую головку и низкую точность. Планшетные сканеры – более точные, но низкоскоростные; столбцы и строки изображения задаются перемещениями источника света и считывающей головки. Барабанные сканеры не без оснований считаются наиболее точными; строки формируемого изображения задаются вращением барабана, а столбцы – перемещением считывающей головки.
Офисные сканеры характеризуются относительно низким геометрическим разрешением (от 10 мкм с использованием фотодиодов до 100 мкм на основе ПЗС-линеек), существенными геометрическими ошибками положения элементов растра и используются для сканирования фотоснимков только в исключительных случаях.
Фотограмметрические сканеры характеризуются высоким геометрическим разрешением (не менее 10 мкм при использовании ПЗС-матриц и ПЗС-линеек) и высокой геометрической точностью, определяемой величиной ошибки сканирования и повторяемостью (изменением ошибки). С их помощью можно сканировать чернобелые (штриховые) или цветные снимки. Технические характеристики некоторых наиболее распространенных фотограмметрических сканеров приведены в табл. 9.2; наличие 24-х уровней квантования обеспечивает получение цветного изображения (3 канала по 8 бит).
Таблица 9.2
|
Наименование |
|
Характеристика |
|
|
|
Характеристики |
фотограмметрического сканера |
|||
|
|
ОАО |
«Дельта», |
СКФ-11. |
DSW500 |
|
|
«Пеленг», РБ |
Украина |
Россия |
LH System |
|
Размер снимка, мм |
300 400 |
300 450 |
300 300 |
260 260 |
|
Размер пиксела, мкм |
5 |
8 – 128 |
8 |
9 |
|
Ошибка сканирования, мкм |
2 |
3 |
3 |
2 |
|
Число уровней квантования, бит |
3 8 =24 |
3 8 =24 |
3 8 =24 |
1 10 |
Некоторые фотограмметрические сканеры (например, «Дельта» и др.) предусматривают возможность сканирования аэронегативов с
11

неразрезанного аэрофильма, как это практикуется в фотограмметрическом производстве.
Затраты времени на сканирование характеризуются следующими данными для сканера «Дельта» (рис. 9.6): черно-белый снимок формата 23 23 см с геометрическим разрешением 8 мкм сканируется за 12 минут, а с геометрическим разрешением 30 мкм – за 4 минуты. Для получения цветного растрового изображения того же формата и с той же геометрической точностью требуется 30 и 9 минут со-
Рис. 9.6. Фотограмметрический |
ответственно. |
сканер «Дельта» (Украина) |
Важнейшим элементом форми- |
рования цифрового изображения является эталонирование сканера, особенно в случае, если он не является фотограмметрическим. Сущность эталонирования заключается в сканировании контрольной сетки с нанесенными на нее горизонтальными и вертикальными штрихами, расстояния между которыми известны с точностью 1–2 мкм. На полученном изображении измеряют «пиксельные» координаты xP, yP крестов контрольной сетки в системе oPxPyP (рис. 9.2), преобразуют их в линейную меру с учетом заданного геометрического разрешения и сравнивают полученные значения с точными координатами, отсчитанными по контрольной сетке. По найденным разностям координат соответствующих точек строят поле искажений, характеризующее все виды геометрических искажений, вносимых сканером в той или иной точке поля сканирования.
Впоследующем изображения, полученные с помощью этого сканера, могут быть исправлены в соответствии с параметрами поля искажений. Имеющиеся публикации свидетельствуют, что искажения фотограмметрического сканера можно уменьшить до 1 мкм.
Цифровые съемочные системы (сенсоры) появились только на рубеже веков. К этому времени было достигнуто сопоставимое
сфотоснимками геометрическое разрешение (5–6 мкм), появились средства хранения громадных объемов информации (порядка 1 Гб на каждый снимок), создана аппаратура стабилизации съемочной камеры в полете и высокоточного определения координат центров фотографирования.
Внастоящее время успешно эксплуатируются несколько цифровых камер, в частности: ADS40 (фирма LH-System, Швейцария),
12
DMC2001 (фирма Z/I Imaging (США, Германия), HRSC (центр косми-
ческих исследований Германии DLR) и др., обеспечивающие возможность получения изображений как в видимой части спектра, так и в инфракрасном диапазоне. Имеются данные о Российских цифровых съемочных комплексах ЦТК-140 и ЦТК-70. Некоторые характеристики этих камер приведены в табл. 9.3.
Таблица 9.3
Наименование |
|
Характеристика камеры |
|
||
характеристики |
ADS40 |
DMC |
HRSC |
ЦТК-140 |
ЦТК-70 |
Фокусное расстояние, мм |
62,5 |
120 |
47 - 175 |
140 |
70 |
Размер пиксела, мкм |
6,5 |
6 |
6 7 |
7 |
7 |
Число спектральных каналов |
6 |
12 |
5 |
1 |
4 |
Радиометрическое разрешение, бит |
8 |
8 |
8 12 |
8 |
10/8 |
Светочувствительный ПЗС-элемент |
линейка |
матрица |
линейка |
линейка |
линейка |
С точки зрения фотограмметрической обработки цифровых изображений, получаемых с помощью цифровых съемочных систем на ПЗС-линейках, чрезвычайно важны два обстоятельства:
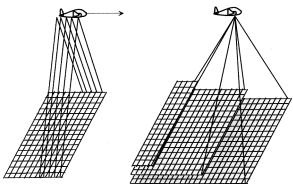
1. Изображения формируются в результате сканирования местности в направлении, перпендикулярном направлению полета. Поэтому результатом съемки являются не кадровые снимки, а полосы изображений, так что стереоскопические наблюдения и измерения возможны только по полосе перекрытия со смежным маршрутом (рис. 9.7, a).
2. Геометрия сканерных снимков не соответствует цен-
тральной проекции, поскольку каждая их строка формируется из собственного центра. Фотограмметрической обработке таких изображений предшествует преобразование их в форму, соответствующую законам построения изображений при центральном проектировании.
Отсутствие продольных перекрытий сканерных снимков и невозможность создания по ним стереопар существенно снижают точность их фотограмметрической обработки, поэтому современные съемочные
13
системы предусматривают одновременное применение нескольких ПЗС-линеек, каждая из которых формирует изображение по определенномунаправлению (рис. 9.7,б).
Так, цифровая система ASD40 имеет в фокальной плоскости три ПЗС-линейки, одна из которых обеспечивает съемку полосы по направлению «вперед», вторая – полосы в направлении точки надира («вниз»), а третья – полосы «назад». Совместная обработка трех полос изображений позволяет получить продольные перекрытия и выполнить стереоскопические наблюдения.
Цифровая съемочная система HRSC (High Resolution Stereo Camera) с помощью девяти линеек ПЗС в фокальной плоскости объектива выполняет съемку одновременно девяти перекрывающихся полос, пять из которых используется для стереообработки, а остальные четыре обеспечивают получение изображения в том или ином оптическом диапазоне.
9.5. Стереоскопические наблюдения и измерения цифровых изображений
Стереоскопические наблюдения двух изображений возможны при выполнении условий, полностью соответствующих сформулированным в Главе 6 и касающихся съемки с двух различных точек пространства, разномасштабности изображений, величины угла конвергенции главных оптических осей и тому подобное. Одним из основных условий получения стереоэффекта является требование наблюдения каждого снимка только одним глазом.
Как и в случае наблюдения аналоговых снимков, основными способами получения стереоскопического эффекта являются анаглифический, затворный, оптический и др., получившие в компьютерном исполнении новые возможности. Их реализация учитывает ряд особенностей работы с цифровыми изображениями, в частности: простота геометрических и фотометрических преобразований, формирование изображения на экране монитора с покадровым (page-flipping) или построчным (interlace) режимом вывода, наличие видеопамяти и др.
Анаглифический способ стереоскопических наблюдений не предполагает наличия какого-либо специального оборудования в виде плат или адаптеров, и требует наличия лишь анаглифических очков. Наблюдаемая при этом стереоскопическая модель формируется по
14
правилам, изложенным ранее для случая наблюдения аналоговых снимков.
Перекрывающиеся части левого и правого изображений, образующие зону стереоскопических наблюдений (рис. 9.8), окрашиваются в дополнительные цвета и выводятся на экран либо по строкам (четные –
левого снимка, а нечетные – правого), либо путем наложения левого на правое. Полученное на экране монитора совмещенное изображение рассматривается через анаглифические очки, стекла которых окрашены в те же цвета, что и соответствующие им изображения снимков. В результате
наблюдатель видит пространственную модель местности, механизм возникновения которой был рассмотрен ранее применительно к получению стереомодели по аналоговым снимкам. В первом случае наблюдатель видит «разреженное» изображение, что снижает точность стереоскопических измерений, а во втором – цвет и оптическая плотность каждого пикселя суммарного изображения (элемента монитора), формируемые в зависимости от цвета и плотности накладывающихся пикселей изображений, что неизбежно ведет к некоторым потерям четкости. Однако в обоих случаях каждый глаз наблюдателя видит только одно изображение, что и вызывает возникновение стереоскопической модели местности.
Затворный способ получения стереоскопического эффекта основан на специфике представления изображения на экране монитора и предполагает применение специальных затворных (жидкокри-
сталлических) очков с LCD-затворами (Liquid Crystal Display) раз-
личных типов (ИБИК, NuVision, и др.), в которых стекла становятся прозрачными поочередно, в соответствии со сменой видеостраниц на экране монитора. Сущность способа заключается в следующем.
Изображения левого и правого снимков формируются на страницах видеопамяти и поочередно выводятся на экран монитора. Наблюдения выполняются через очки, представляющие собой пару плоскопараллельных пластин с заключенным между ними слоем жидкого кристалла, который при воздействии на него электрического импульса может изменять интенсивность проходящего через него света так, что в каждый момент времени наблюдатель воспринимает изображение на экране монитора только одним глазом, левым или правым. Поскольку смена страниц видеопамяти на экране монитора син-
15

хронизирована с изменением прозрачности пластин затворных очков при помощи специального канала связи, то наблюдатель видит либо прямой стереоэффект, либо обратный. Для смены прямого стереоэффекта на обратный и наоборот нужно изменить фазу, управляющую последовательностью вывода страниц видеопамяти.
Покадровый (page-flipping) режим стереонаблюдений предполагает поочередный вывод на экран левого и правого изображений синхронно со сменой прозрачности пластин затворных очков, установленных перед левым и правым глазом. Вывод полных изображений обеспечивает получение более высокого качества стереоизображения, но требует в целях обеспечения комфортности наблюдений для глаз достаточно высокой вертикальной частоты монитора (не менее 120 герц).
Построчный (interlace) режим стереонаблюдений предполагает деление кадра на два полукадра с чётными и нечетными строками соответственно. Правое и левое изображения стереопары выводятся на экран поочередно в «чётном» и «нечётном» полукадре, а синхронизируемые с вертикальной разверткой монитора затворные очки позволяют наблюдать два изображения «одновременно» и таким образом проводить стереоизмерения. Необходимым условием комфортной для глаз работы в этом режиме является достаточно высокая вертикальная частота монитора (как минимум 75 герц на «каждый глаз» – то есть примерно 150 герц при переключении в интерфейс).
Построчный режим применим только к экрану в целом, что приводит к некоторым неудобствам, например, при работе с меню. Другим недостатком является прореживание картинки и, как следствие,
снижение разрешения в связи с использованием полукадров. |
|
|||
|
|
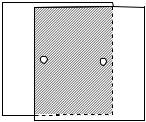
Оптический |
способ |
сте- |
|
|
реоскопических наблюдений |
пред- |
|
|
|
полагает вывод зоны стереонаблюде- |
||
|
|
ний левого и |
правого снимков |
|
|
|
(рис. 9.9) соответственно в левую и |
||
|
|
правую части экрана. Оба изобра- |
||
|
|
жения окрашены в естественные цве- |
||
|
|
та, поэтому для их рассматривания и |
||
|
|
получения стереоскопического |
эф- |
|
|
|
фекта нужно выполнить искусствен- |
||
|
Рис. 9.9. Стереоприставка для |
|||
|
ное разделение соответственных лу- |
|||
|
наблюдения стереомодели |
чей, что достигается применением |
||
|
|
|||
|
|
специальной стереоприставки, уста- |
||
|
|
16 |
|
|
реоприставки, устанавливаемой перед монитором. Это обеспечивает возможность наблюдения стереоскопической модели местности и ее измерения, минуя неизбежные потери света при использовании некоторых других способов и приспособлений.
Имеются и другие способы получения стереоскопического эффекта по паре цифровых изображений, например, поляроидный, адаптированный к компьютерному построению модели и др.
Измерение построенной рассмотренными выше способами стереоскопической модели выполняют, как и в случае использования аналоговых изображений, монокулярным и стереоскопическим способами.
Монокулярный способ измерений используют при нанесении на снимки опорных точек, внутреннем ориентировании снимков и др. Применительно к обработке цифрового изображения монокулярные измерения сводятся к опознаванию нужной точки путем наведения на нее маркера, заменяющего измерительную марку стереокомпаратора. Считывание координат точки в системе растрового изображения oPxPyP (рис. 9.2) и преобразование их в ту или иную систему выполняется в автоматическом режиме.
Стереоскопические измерения выполняют способом мнимой марки, в качестве которой используют курсор, причем, оператор может выбрать любой из доступной палитры цвет его изображения, размер и форму (точка, крест, прицел, косой крест и пр.). С помощью специальных технологических приемов точность стереоскопических измерений может быть повышена до ⅓ ¼ от величины геометрического разрешения цифровых снимков.
9.6. Автоматическая идентификация точек цифровых снимков (коррелятор)
Первые исследования в области автоматизации стереоскопических измерений были выполнены в МИИГАиК профессором А. С. Скиридовым в 1924–1932 гг. Полагая изображения достаточно малых участков снимков стереопары подобными, он предложил преобразовывать эти участки в электрические сигналы и, анализируя их, отождествлять (идентифицировать) соответственные точки. В то время это не получило развития из-за отсутствия технических средств, и в 1960 г. А. С. Скиридов возобновил свои исследования, приступив вместе с Г. Д. Федоруком к созданию изогипсографа – прибора для автоматической рисовки горизонталей.
17
Первый автоматизированный прибор, доказавший принципиаль- |
||||||
ную возможность решения этой задачи, был разработан в 1950-х гг. |
||||||
по предложению Гаррисона фирмой Бауш и Ломб совместно с На- |
||||||
учно-исследовательским топографическим отделом инженерных |
||||||
войск США. В последующем эти идеи были воплощены в целой се- |
||||||
рии фотограмметрических приборов – Стереомате (США), Аналити- |
||||||
ческом стереоприборе ОМИ-НИСТРИ (Канада), Аналитическом фо- |
||||||
токартографе (СССР) и др. |
|
|
|
|
|
|
Новый импульс получили идеи автоматизации с появлением |
||||||
ПЭВМ, дешевой электронной памяти, высокоточных сканеров и раз- |
||||||
витием теории машинного зрения. Применение этих и ряда других |
||||||
достижений науки и техники открыло путь к автоматизации широкого |
||||||
круга фотограмметрических задач, основанных на автоматической |
||||||
идентификации точек на перекрывающихся снимках. |
|
|
|
|||
|
|
В настоящее время |
||||
Образ R |
Образ R |
идентификация точек на |
||||
паре |
снимков |
рас- |
||||
|
|
|||||
|
Зона |
сматривается как |
стати- |
|||
|
поиска |
стическая |
задача |
распо- |
||
|
|
|||||
|
|
знавания |
изображений |
|||
Левый снимок |
Правый снимок |
при наличии помех и ис- |
||||
|
|
кажений и |
решается на |
|||
Рис. 9.10. К автоматической идентификации точек |
основе |
|
динамической |
|||
теории зрения с исполь- |
||||||
зованием оптико-электронных или программных блоков, называемых |
||||||
корреляторами. В ее основе лежит понятие образа – произвольной |
||||||
по форме и размерам области снимка вместе со всей имеющейся ин- |
||||||
формацией. С математической точки зрения образ представляет собой |
||||||
многомерный вектор R как совокупность |
элементов |
изображения |
||||
(пикселов), каждый из которых характеризуется своим положением и |
||||||
оптической плотностью ij |
согласно (9.6). |
|
|
|
|
|
Опознавание точки левого снимка на правом сводится к опреде- |
||||||
лению некоторого образа R на левом снимке и поиску на правом |
||||||
снимке такого образа R , чтобы расстояние между ними было ми- |
||||||
нимальным: |
R – R = min. |
|
|
|
(9.7) |
|
|
|
|
|
|||
Практически для автоматического опознавания точки необхо- |
||||||
димо: |
|
|
|
|
|
|
|
18 |
|
|
|
|
|
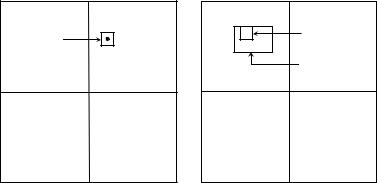
1.Выбрать на левом снимке образ R в виде области размером n n пикселов, в центре которой размещена опознаваемая точка (рис. 9.10), и определить его характеристики, на основе которых будет выполняться проверка условия (9.7).
2.Определить зону поиска размером m m пикселов (m n) вероятного расположения искомой точки на правом снимке (рис. 9.10) с ко-
ординатами центра xп xл bсн, yп yл.
3.Последовательным перемещением области размером n n пикселов в границах зоны поиска размером m m создать на правом снимке серию образов R и определить характеристики каждого из них с целью проверки условия (9.7).
4.Сопоставить характеристики каждого образа R с характери- стикой-эталоном вектора R. Искомая точка на правом снимке будет
расположена в центре образа R , для которого выполняется условие
(9.7).
Установление степени соответствия векторов R и R представляет основную трудность и может быть выполнено различными путями. Например, один из них основан на расчете для образа-эталона R и каждого образа R правого снимка ковариационной матрицы
|
|
|
|
c |
c |
c |
|
|
|
|
|
||
|
|
|
|
11 |
12 |
13 |
|
|
|
|
(9.8) |
||
|
|
|
|
C c21 |
c22 |
c23 , |
|
|
|
||||
|
|
|
|
c |
31 |
c |
32 |
c |
|
|
|
|
|
где |
|
|
|
|
|
33 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c11 k (xi |
x0 )2 , |
c12 c21 k (xi |
x0 )(yi |
y0 ), |
x0 xi / N |
||||||||
c22 k (yi |
y0 ) |
2 |
, |
c13 c31 k (xi |
x0 )( i |
0 ), |
y0 yi |
/ N |
|
||||
|
|
||||||||||||
c33 k ( i |
0 )2 , |
c23 c32 k (yi |
y0 )( i 0 ), |
0 i |
/ N |
, |
|||||||
|
|||||||||||||
|
|
|
|
k 1/(N 1), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где N – число элементов в образах R и R ; |
xi, yi, i – координаты эле- |
||||||||||||
ментов образа и их оптические плотности. |
|
|
|
|
|||||||||
Если C0 – ковариационная матрица (9.8) образа R на левом |
|||||||||||||
снимке, то условие (9.7) будет выполненным для вектора R , |
для ко- |
||||||||||||
торого разность матриц V = C0–Ci минимальна.
Более широко применяется метод идентификации точек снимков, основанный на расчете коэффициентов корреляции между оптическими плотностями элементов образа R и каждого из образов R на правом снимке с использованием формулы
19

|
|
|
( i |
0 )( i 0 ) |
|
|||||
r |
|
|
||||||||
|
|
|
|
|
|
|
, |
(9.9) |
||
|
|
|
|
|
|
|
||||
( i |
|
|
|
|||||||
|
|
|
0 )2 ( i 0 )2 |
|
||||||
где 0 и 0 – средние оптические плотности элементов зон (фрагментов), соответствующих образам левого (R) и правого (R ) снимков.
Коэффициенты, подсчитанные для сочетаний образа R со всеми образами R , образуют корреляционную матрицу: максимальное значение ее элемента соответствует наиболее тесной связи оптических плотностей сравниваемых участков левого и правого снимков, и, следовательно, выполнению условия (9.7). Так что искомая точка лежит в центре образа R с максимальным коэффициентом корреляции.
Некоторые способы предполагают отыскание искомой точки по максимуму корреляционной функции, составленной на основе анализа элементов корреляционной матрицы с частными коэффициентами корреляции (9.9), соответствующей искомому образу R .
Размер области снимка, отождествляемой с образом R, обычно составляет 20 20 пикселов; при малом числе контуров местности он увеличивается до 40 40 пикселов. Программы обработки обычно запрашивают полуразмер корреляционной матрицы (образа R).
Размер области поиска на правом снимке выбирается таким, чтобы он был в два раза больше ожидаемого смещения точки из-за влияния рельефа местности. Так, при высоте фотографирования H = 2000 м, максимальном превышении рельефа над средней плоскостью h = 50 м и расстоянии от центра снимка до угла рабочей площади r = 100 мм (формат кадра 23 23 см) будем иметь h = 2,5 мм, а размер области поиска – 5 5 мм.
Рассмотренные варианты установления степени соответствия образов R и R далеко не единственные: в специальной литературе имеются упоминания о методе иерархической релаксации (методе пирамид HRC), методе вертикальной линии (ULL), методе динамического программирования и тому подобное. Некоторые из них основаны на анализе тех или иных признаков, характеризующих выделенные по группе пикселов элементы – их форму, взаимное расположение, ориентировку и другие. Однако все методы идентификации точек объединяют два обстоятельства:
20