

2437
.pdfгде DOP (Dilution of Precision) означает «уменьшение точности», а первые буквы подсказывают, точность какого именно неизвестного уменьшается: G – всех составляющих (Geometrical), P – в пространст-
ве (Position), H – в плане (Horizontal), V – по высоте (Vertical), T– во вре-
менныхзадержках(Time).
Чем больше значение ГФ, тем хуже точность, и для ее повышения необходимо увеличить число наблюдаемых спутников. Основным является фактор PDOP, для которого приняты следующие вербальные оценки: 4 – хорошо, 5–7 - удовлетворительно, 7 – плохо.
Качество навигационного сигнала зависит от условий его про-
хождения через тропосферу и ионосферу, точности содержащейся в нем информации, релятивистских эффектов и пр. (табл. 10.5).
|
|
Таблица 10.5 [8] |
|
Источник погрешностей |
Ошибка определения дальности по коду, м |
||
P |
C/A |
||
|
|||
|
|
|
|
Прогноз эфемерид |
3,5 |
3,5 |
|
|
|
|
|
Эталон времени спутника |
1,7 |
1,7 |
|
|
|
|
|
Ионосферная рефракция |
1,0 |
4,0 |
|
|
|
|
|
Тропосферная рефракция |
0,5 |
0,5 |
|
|
|
|
|
Многолучевость |
1,0 |
1,0 |
|
Аппаратура потребителя |
1,08 |
10,8 |
|
|
|
|
|
Суммарная погрешность |
4,31 |
12,21 |
|
|
|
|
|
Прогноз эфемерид. Эта погрешность связана с неточностью используемой модели геопотенциала Земли, в частности – влияния гравитационного поля, солнечного давления, движения полюсов Земли и пр.
Эталон времени спутника. Погрешность возникает из-за сдвига частот бортового эталона времени под влиянием релятивистского и гравитационного эффектов.
Ионосферная рефракция является следствием изменения коэффициента ее преломления и учитывается по данным измерений на двух частотах.
Тропосферная рефракция возникает из-за непостоянства коэффициента преломления при изменении высоты.
Многолучевость распространения сигнала зависит от взаимного расположения спутника, отражающей поверхности и размещения по-
91

требителя. Эта погрешность не подда-
Z |
|
ется прогнозированию, и в табл. 10.5 |
||||
|
|
|
|
|
|
|
A |
|
дано ее примерное значение. |
||||
|
|
|
rA |
|
||
|
|
|
|
Аппаратура потребителя вно- |
||
|
|
|
|
S |
|
|
|
RA |
|
||||
|
|
|
|
|
сит погрешности, вызванные пре- |
|
|
|
|
RS |
|
|
|
O |
|
|||||
|
|
Y |
имущественно шумом приемника, по- |
|||
|
|
|
|
|
||
|
|
|
|
|
|
грешностями определения парамет- |
X |
|
ров антенны, недостаточной точно- |
||||
|
|
|
|
|
|
стью программной обработки и др. |
Рис. 10.14. Схема абсолютного |
|
Методы позиционирования. В |
||||
позиционирования |
|
специальной литературе под абсолют- |
||||
ным позиционированием понимают определение координат пункта, то есть работу в кодовом навигационном режиме, а под относительным – определение местоположения одного пункта относительно другого твердого, исходного пункта.
Абсолютное позиционирование предполагает определение геоцентрических (X, Y, Z) или геодезических (B, L, H) координат фазового центра спутникового приемника на основе следующей зависимости между векторами, определяющими положение наблюдателя RA, спутника RS и псевдодальностью rA и ее искажением r (рис. 10.14):
RA RS rA r.
Пространственное положение спутника в момент наблюдений RS вычисляют с использованием принятой модели его движения и данных
KA1 |
KA3 |
навигационных сообщений, а даль- |
||
|
KA2 |
ности |
rA – по формулам |
(10.3). |
|
KA4 |
|||
|
Искомый вектор RA находят из реше- |
|||
|
|
|||
|
|
ния четырех нормальных уравнений, |
||
|
|
связывающих поправки к прибли- |
||
|
|
женным координатам определяемой |
||
|
|
точки и к часам приемника. |
|
|
ОП-1 |
ОП-2 |
Чаще всего точность абсолют- |
||
ного |
позиционирования для |
целей |
||
Рис. 10.15. Схема размещения |
навигации оказывается недостаточ- |
пунктов при относительном |
ной, и для ее повышения использу- |
позиционировании |
ют дифференциальные подсистемы. |
Относительное позиционирование считается наиболее точным и предполагает использование двух синхронно работающих приемников (рис. 10.15), один из которых установлен на опорном пункте ОП-1 и
92
называется базовым или референцным (base or reference station), а второй – над определяемой точкой ОП-2 и называется ровером (rover). При обработке результатов измерений формируются пространственные векторы, определяющие положение ровера относительно базового пункта; применение специальных приемов позволяет компенсировать наиболее значимые погрешности измеренных дальностей и уменьшить влияние остальных источников ошибок до приемлемых пределов.
Для целей навигации по понятным причинам используются только кинематические режимы измерений (с подвижным ровером), общая характеристика которых представлена в табл. 10.6.
|
|
Таблица 10.6 |
|
Режим |
Характеристики |
Точность*, мм |
|
|
Определение положения точек при пе- |
(10 20 + 2 10- |
|
Кинематика |
ремещении ровера (в движении или с |
6D) |
|
|
короткими остановками) |
|
|
Стой-Иди |
1-минутные остановки на определяе- |
(5 + 1 10-6D) |
|
|
мых пунктах |
|
|
|
Постоянная связь с базовой станцией по |
(5 + 1 10-6D) |
|
RTK |
радиомодему и определение координат |
||
|
в реальном масштабе времени |
|
|
OTF |
Определение координат центров фото- |
|
|
графирования в полете 2-частотным |
100 150 |
||
(на - лету) |
|||
приемником |
|
||
|
|
||
* D – расстояние между базовым и определяемым пунктами. |
|
||
Режим кинематики имеет ряд разновидностей:
стой - иди (Stop and Go) с короткими остановками на определяемых точках, координаты которых определяются при постобработке;
кинематики в реальном времени (Real Time Kinematics – RTK) предполагает оснащение приемников радиомодемами и определение координат точек установки ровера в течение нескольких секунд с учетом поправок, полученных по радиомодему с базовой станции;
OTF (On The Fly – на лету) используется для определения координат движущихся объектов (самолетов, автомобилей и др.) при помощи непрерывного приема сигналов двухчастотным приемником.
93
Одновременное наблюдение спутников ГЛОНАСС и GPS позволяет повысить точность позиционирования и сократить время измерений.
10.3.5. Постоянно действующие и временные базовые станции
Достаточно длительное время основу наземной инфраструктуры систем точного позиционирования составляли постоянно действующие базовые (референцные) станции (рис. 10.16), обозначаемые аб-
бревиатурой CORS (Continuous Operation Reference Station) [17]; в те-
чение последних 3–4 лет начата реализация сходных принципов дифференциальной коррекции на основе временных или виртуальных станций [42].
Для обеспечения соответствующих работ, в зависимости от их точности и размера территории, может использоваться либо одиночная станция, либо несколько объединенных в сеть станций.
Одиночная станция может быть постоянной или временной и включает автономно работающий двухчастотный спутниковый приемник, двухчастотную антенну и средства связи. Управление работой приемника осуществляется компьютером, расположенным рядом с приемником или на удалении от него.
«Сырые» (не обработанные) результаты кодовых или фазовых спутниковых измерений, получаемые приемником ГНСС, передаются в память компьютера и записываются в файлы определенной длины и с помощью специализированного программного обеспечения передаются по каналам связи на FTP-сервер для обеспечения пользователям простого к ним доступа через Интернет. Одновременно с помощью этих программ выполняется обработка данных приемника ГНСС и расчет дифференциальных поправок, которые могут передаваться удаленному на расстояние до 300 км пользователю по радиоканалам, высокоскоростным беспроводным сетям (GSM, GPRS, CDMA и др.) или через Интернет [17].
Однако точность позиционирования по этой схеме заметно падает с увеличением расстояния до базовой станции, и сантиметровая точность определения координат в режиме реального времени RTK достигается лишь на удалениях, не превышающих 20–30 км [17], а субметровая – на удалениях до 200 км [42].
94
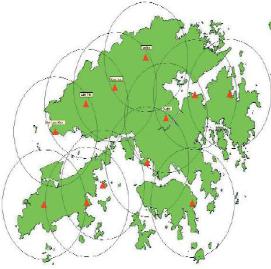
Сеть базовых станций является, как правило, стационарной и включает 5, 10, 20 и более подключенных к серверу по каналам связи спутниковых приемников, каждый из которых работает автономно и вне зависимости от других. В этом случае сантиметровая точность позиционирования может быть достигнута на значительной территории (рис. 10.16).
Такая сеть в большинстве случаев более эффективна по сравнению с традиционными триангуляционными и полигонометрическими
построениями, поскольку станции могут быть установлены в любом месте, вне зависимости от условий видимости между ними, геометрия сети не является столь критичной, а точность вышеи более стабильна.
Все базовые станции по каналам связи (телефонным проводным линиям, компьютерной сети, сотовой связи или по сети Интернет) связываются с сервером стационарного вычислительного центра. Установленное на сервере специализированное программное обеспечение осуществляет управление всеми базовыми станциями сети, загрузкой файлов спутниковых данных приемников в память сервера через регулярные промежутки времени, расчет дифференциальных поправок и пр. [17].
Концепция виртуальной базовой станции (VRS - Virtual Reference Station), являющейся логическим продолжением рассмотренных выше технологий и объединяющей большую зону покрытия с небольшим количеством базовых станций, по сути, является дальнейшим развитием технологии ДПС OmniSTAR и сводится к следующему [5, 42]:
1)данные референцных станций сети непрерывно передаются в вычислительный центр, где выполняется разрешение фазовых неоднозначностей для базовых линий сети, сравнение полученных из мгновенных решений координат с известными координатами и формирование невязок;
2)используя математический аппарат фильтра Калмана (4.2), выполняется построение линейной или более сложной модели
95
ошибок, необходимой для прогнозирования вероятных ошибки
в положении базовых станций;
3)по навигационным координатам пользователя и поступающим с его приемника результатам измерений выполняется:
создание виртуальной базовой станции,
корректировка построенной модели ошибок,
расчет поправок к координатам с использованием математического аппарата фильтра Калмана;
4)передача вероятных VRS–поправок пользователю по стандартным протоколам и форматам (например, RTCM).
Как и в технологии ДПС OmniSTAR, точность VRS-
позиционирования практически не зависит от расстояния между реально существующей базовой станцией и приемником пользователя.
Решаемые с помощью одиночных базовых станций, реальной или виртуальной сети задачи зависит от возможностей используемого программного обеспечения.
Таблица 10.7
Программа |
Основные функции программы |
|
Обслуживание одиночной станции. Запись в компьютер данных |
GPSBase |
базовой станции для постобработки, расчет и передача поправок |
|
RTK сантиметровой точности при удалениях до 20 км и поправок |
|
DGPS субметровой точности при удалениях до 200 км; |
|
Обслуживание сети базовых станций. Связь с удалёнными базо- |
|
выми GPS-приёмниками, контроль целостности системы и качест- |
GPSNet |
ва, анализ поступающих данных с оценкой многолучёвости, опре- |
|
деление срывов слежения за фазой несущей и её восстановление, |
|
расчет и передача дифференциальных поправок для мобильного |
|
пользователя от ближайшей к нему базовой станции; |
|
Технология VRS (три и более базовых станции). Обработка дан- |
RTKNet |
ных всех станций сети, построение модели ошибок, расчет попра- |
вок с точностью от 0,02 – 0,03 м до 1,0 – 3,0 м для режимов DGPS |
иRTK, реализации инициализации OTF.
Втабл. 10.7 приведены основные функции программ, разработанных компанией Trimble для обслуживания базовых станций [42].
По мере изменения технических условий или роста требований
кточности программа GPSBase легко модернизируется до GPSNet
или до RTKNet.
96
10.4. Интеграция инерциальных и спутниковых систем
Интеграция двух навигационных систем предполагает их взаимное дополнение и возможность повышения эффективности совместной эксплуатации. Такая возможность становится реальностью только при условии изучения их достоинств и недостатков, разработки средств устранения недостатков каждой из них и суммирования в гибридной системе их достоинств, а также соответствующей технологии интеграции.
10.4.1. Достоинства и недостатки навигационных систем
Интерес потребителей к инерциальным средствам измерений объясняется рядом их преимуществ перед другими системами, основными из которых являются:
автономность работы, независимость от внешней информации
иусловий измерений;
возможность определения углов ориентации по трем координатным осям и вычисления относительных координат;
высокая частота решений, достигающая 500 Гц и пр. [43, 47].
Вместе с тем им присущи и весьма существенные недостатки, связанные с быстрым накоплением ошибок вследствие дрейфа гироскопов и интегрирования их показаний: поскольку скорость вычисляется интегрированием ускорения, то постоянная его ошибка преобразуется в непрерывно нарастающую ошибку и скорости, и координат объекта.
Казалось, что появление глобальной спутниковой навигационной системы (ГНСС), обеспечивающей возможность получения точных и относительно стабильных во времени абсолютных координат с помощью сравнительно недорогого и компактного оборудования, позволяет отказаться от использования инерциальной системы. Однако оказалось, что и спутниковые системы также не свободны от недостатков, наиболее существенными из которых являются [43, 47]:
зависимость точности позиционирования от числа спутников, геометрии наблюдаемого созвездия и типа приемника;
наличие «мертвых зон» и порой заметное влияние многолучевости, особенно в городах, в залесенной местности и др.;
низкая (до 20 Гц) частота спутникового позиционирования;
возможность «потери спутника» и необходимость повторной инициализации приемника;
97
низкая точность определения крена движущегося объекта. Все это и стимулировало разработку интегрированных навига-
ционных систем, в которых спутниковые и инерциальные определения служат взаимным дополнением, а недостатки одних измерений компенсируются преимуществами других. При этом интеграция систем сводится к распределению их функций согласно табл. 10.8.
Таблица 10.8 [27]
Функции ИНС |
|
Функции СНС |
|
||
•ускорение повторного захвата спут- |
•обеспечение |
выставки |
инерциальных |
||
никовых сигналов при их потере; |
|
приборов; |
|
|
|
•восстановление высокоточного |
ре- |
•моделирования систематических уходов |
|||
шения после |
возобновления захвата |
датчиков ИНС; |
|
|
|
спутниковых сигналов; |
|
• уменьшение |
ошибок |
инерциального |
|
•определение положения объекта при |
решения на основе совместной обработки |
||||
плохой геометрии спутников или от- |
измерений и уравнивания с использова- |
||||
сутствии сигналов; |
|
нием фильтра Калмана. |
|
||
•выполнение |
позиционирования |
с |
|
|
|
высокой частотой получения данных. |
|
|
|
||
Ведущие позиции в разработке интегрированных комплексов, программных средств и соответствующих технологий занимают ряд известных компаний: с 1993 года – Applanix (Канада), с 2004 г. – NovAtel (Канада) и JNS (США), с 2006 года – Leica Geosystems (Швейцария). С 2000 года такие комплексы широко используются для обработки цифровых снимков, полученных линейным сканированием. Причем, компания Leica Geosystems и Applanix специализируются на внедрении технологии преимущественно в аэросъемочные работы, а остальные из перечисленных выше – в практику выполнения топо- графо-геодезических работ.
Основными компонентами комплекса являются: инерциальный измерительный блок (IMU), двухчастотный спутниковый приемник GPS или ГЛОНАСС и бортовой вычислительный комплекс, причем, основным условием его функционирования является наличие сети референцных (базовых) станций, удаление которых от передвижного приемника не должно превышать 50 км [4].
С точки зрения уравнительных вычислений различия между рассматриваемыми системами, базирующимися на различных физических принципах, заключаются в неодинаковом характере действия погрешностей измерений, в частности:
98
данные инерциальной системы характеризуются низким уровнем случайных ошибок и заметным влиянием систематических, ошибок, вызванных погрешностями начальных условий, показаний гироскопов и акселерометров, неточностью ускорения силы тяжести и пр.;
результаты спутниковых измерений содержат случайные погрешности, вызванные нестабильностью частоты генератора приемника, задержкой сигнала из-за влияния тропосферы и ионосферы, многолучевостью, погрешностей эфемерид и практически свободны от влияния систематических.
Сучетом этого преимущества гибридной (интегрированной) системы, в которой недостатки одной системы компенсируются достоинствами другой, представляются очевидными. Достижение этой цели связывается с использованием соответствующей системы обработки и согласования результатов инерциальных и спутниковых измерений.
Одной из наиболее распространенных систем такой обработки результатов измерений является фильтр Калмана, позволяющий выполнить оценку состояния динамической системы по результатам обработки неполных измерений, искаженных влиянием ошибок [47, 53].
10.4.2.Фильтр Калмана
В 40-х годах прошлого столетия Норбертом Винером был предложен алгоритм, позволяющий выделить скалярный сигнал из шума с постоянными статистическими характеристиками, иначе говоря, обработать результаты измерений, содержащих погрешности. В 1960-м году этот алгоритм был усовершенствован Рудольфом Калманом и распространен на обработку в реальном времени данных, полученных динамическими системами с изменяющимися статистическими характеристиками (например, навигационными системами, работающими с использованием различных физических принципов). В настоящее время этот фильтр используется при решении задач геодезии, геологии, океанографии, гидродинамики и др.
Сущность алгоритма, лежащего в основе фильтра Калмана, заключается в следующем.
Известно, что динамическую системус изменяющимися во времени статистическими параметрами характеризуют некоторые элементы ее поведения(параметры)посостояниюнамоментвремениk,вчастности[51]:
вектор оценки состояния xk, представляющий собой некоторый набор величин (например, координат Xk, Yk, Zk, проекций ско-
99
рости на координатные оси VX, VY, VZ и пр.), которые не могут быть измерены непосредственно и подлежат определению;
вектор измерений zk некоторых выходных сигналов (например, ускорения, углов наклона и пр.) системы, которые связаны
с ее состоянием, содержат ошибки (шумы) Rk и могут быть измерены с заданной точностью;
вектор инструментальных ошибок Rk, полученный на основе линейной модели связи элементов вектора измерений с переменными вектора состояния системы;
ковариационная матрица ошибок Pk, – мера точности оцениваемых (определяемых) параметров вектора состояния xk, диагональные элементы которой представляют собой дисперсии этих элементов, а недиагональные характеризуют связь между парами этих элементов;
матрица наблюдений Hk характеризует динамику изменения состояния системы. Элементы этой матрицы представляют собой дифференциалы функций, определяющих соответствующие модели измерений, по параметрам состояния;
матрица возмущений Qk, которая учитывает влияние на систему внешних источников;
фундаментальная матрица Fk, элементы которой описывают динамику состояния системы и определяются путем численного интегрирования уравнения ее движения;
начальные значения вектора оценки состояния x0 и ковариационной матрицы ошибок P0 на момент инициализации системы.
Задачей алгоритма является построение оптимальной оценки состояния системы на основе вектора измерений, содержащего погрешности, причем условием оптимальности оценки состояния является минимум ее средней квадратической ошибки.
В каждом цикле вычислений работу каждого шага фильтра Калмана можно разделить на два этапа (рис. 10.17):
этап прогноза, на котором вычисляются элементы вектора состояния динамический системы и ковариационной матрицы по их значениям в предыдущем цикле или по данным, полученным при инициализации;
этап корректировки, на котором осуществляется обновление вектора состояния и ковариационной матрицы с учетом результатов выполненных измерений и вычисленного значения коэффициента усиления (Kalman-Gain).
100