

2065
.pdfобеспечить решение вопросов, касающихся установления технико-экономической целесообразности практического применения объекта в группе машин разного типоразмера с учетом условий эксплуатации, производства, потребностей и перспектив развития промышленности.
Систему показателей для оценки эффективности землеройных машин целесообразно формировать на базе такого обобщенного показателя как приведенные удельные затраты, который с учетом соответствующих связей и ограничений наиболее полно отвечает рассмотренным требованиям и позволяет оценить эффективность машины как в сфере производства, так и в сфере производительности
[64].
Приведенные удельные затраты являются комплексным показателем оценки эффективности сложных систем наиболее высокого уровня. В наиболее общем виде этот критерий учитывает эффективность соответствующего объекта техники в сферах производства и эксплуатации. Приведенные удельные затраты определяются [69]
ZПр.уд. суд. E kуд.; |
(1.36) |
||||
суд. |
|
СМС |
; |
|
(1.37) |
|
|||||
|
|
ПСМ |
|
||
kуд. |
|
Ц |
|
||
|
, |
(1.38) |
|||
|
|||||
|
ТСМ ПСМ |
|
|||
где суд. - себестоимость единицы продукции; СМС - себестоимость машино-смены; ПСМ - эксплуатационная производительность машины в смену; kуд. - удельные капитальные затраты, т.е. сумма
производственных основных фондов на единицу годового выпуска продукции; Е - нормативный коэффициент эффективности капиталовложений, характеризующий средний размер экономии от снижения себестоимости продукции, приходящийся на 1 руб. дополнительных капиталовложений; Ц - расчетная стоимость машины; ТСМ - число смен работы машины в году в соответствии с установленным режимом работы.
Все узлы, элементы и подсистемы машины можно условно разделить на две основные подсистемы: двигатель как энергетическую установку и машину без двигателя и представить зависимость для расчета приведенных удельных затрат в виде
30
следующей функции от энергоемкости и металлоемкости системы как частных технико-экономических показателей более низкого уровня
[64]:
ZПр.уд. b1 Nуд. b2 mуд.; |
(1.39) |
|||||
b |
|
a1 E a2 |
; |
(1.40) |
||
|
||||||
1 |
|
|
TP kВ |
|
||
|
|
|
|
|||
b2 |
|
a3 E a4 |
, |
(1.41) |
||
|
||||||
|
|
|
TP kВ |
|
||
где а1, а2, а3, а4 - капитальные и эксплуатационные затраты, с учетом затрат на повышение надежности, технологичности, ремонтопригодности и т.п., приходящиеся на единицу мощности двигателя (массы машины) в расчете на смену; mуд. -
материалоемкость; TP - число часов работы машины в смену; kВ |
- |
коэффициент использования машины по времени; Nуд. |
- |
энергоемкость процесса. |
|
Показатель приведенные удельные затраты целесообразно применять если известно, что коэффициенты, входящие в показатель для сравниваемых объектов техники, изменяются в значительной степени [13].
Недостатком этого критерия является то, что часть показателей, входящих в него, не могут быть определены с необходимой точностью, поэтому целесообразно применять более низкие по иерархической структуре показатели (энергоемкость, материалоемкость и т.д.), которые позволяют определять качество машины при неизменных параметрах, входящих в показатели более высокого уровня [13].
Более низким по иерархической структуре общим показателем служит обобщенный показатель оценки. Он позволяет оценить экономию энергетических и материальных затрат и определяется [64]
Пэм=Nуд /Пуд, |
(1.42) |
где Пуд - удельная производительность, которая, в свою очередь, определяется
Пуд=ПТ /m. |
(1.43) |
Обобщенный показатель энергоемкости |
и материалоемкости |
целесообразно применять при условии, что для нового объекта коэффициенты приведенных удельных затрат не эксплуатацию и основные фонды значительно не меняются по сравнению с эталоном.
31
Ниже по иерархической структуре находятся энергоемкость и материалоемкость, входящие в приведенные удельные затраты, оценивающие основные группы подсистем машин или комплексов энергетического и технического назначения. Энергоемкость процесса оценивают показателем Nуд [64]
Nуд=N/Пт, |
(1.44) |
где N - установленная мощность двигателя машины, Пт – техническая |
|
производительность. |
|
Материалоемкость машины mуд является |
показателем, |
определяющим затраты материалов на единицу готовой продукции
[64]
mуд=m/Пт, |
(1.45) |
где m - масса машины.
Важным более низким по иерархической структуре показателем служит производительность, которая является составляющим компонентом показателей более высокого уровня, и они не могут быть определены без известного значения производительности. Этот показатель важен при определении эффективности функционирования объекта. Применительно к автогрейдеру этот показатель имеет вид [64]:
П=3600∙V∙b3/n, |
(1.46) |
где b3 - ширина захвата; n - число проходов автогрейдера по обрабатываемому участку до достижения требуемой точности по СНиП [49]; V - рабочая скорость движения машины.
Необходимость соблюдения точностных требований геометрических параметров земляных сооружений объясняется их функциональным назначением. В связи с этим проектной документацией, СНиП на производство и приемку работ в большинстве случаев предусматриваются допускаемые отклонения от основных проектных размеров. В табл. 1.4 даны численные значения предельных отклонений и соответствующих им средних квадратических отклонений высотных отметок и поперечных уклонов земляного полотна дороги.
32
Таблица 1.4
Связь геометрических параметров земляного полотна, предусмотренных СНиП 3.06.03-85
с среднеквадратическими отклонениями [96]
Контролируемый |
|
Условия оценки |
|
|
параметр |
Количество |
Предел |
|
|
|
|
измерений % |
отклонений |
|
Высотные |
отметки |
|
«ХОРОШО» |
|
продольного профиля |
90 % |
50 ( 10) мм |
30,3 (6,06) мм |
|
|
|
|
«ОТЛИЧНО» |
25,5 (5,1) мм |
|
|
95 % |
50 ( 10) мм |
|
Поперечные уклоны |
|
“ХОРОШО” |
0,00606 |
|
|
|
90 % |
0,010 |
|
|
|
|
( 0,005) |
(0,00303) |
|
|
|
“ОТЛИЧНО” |
0,0051 |
|
|
95 % |
0,010 |
|
|
|
|
( 0,005) |
(0,00255) |
Примечание. Значения в скобках указаны для работ, выполненных автоматизированными машинами.
Критериями, характеризующими точность обработки грунта автогрейдером могут служить вероятностные характеристики случайных функций, описывающих рабочий процесс, например, [110]
~ |
|
|
|
|
|
|
y |
yном ; |
|
|
(1.47) |
||
|
|
min |
|
|||
|
у |
у |
; |
|||
|
|
|
|
|
||
~ |
|
pном |
; |
|
|
|
|
p |
|
|
|
(1.48) |
|
|
|
min |
|
|||
|
|
|
, |
|||
|
|
|
|
|
||
где ~y,~p - математические ожидания соответственно вертикальной координаты и угла наклона поперечного профиля; yном, pном -
номинальные значения соответственно вертикальной координаты и угла наклона поперечного профиля; y , - среднеквадратические
отклонения соответственно вертикальной координаты и угла наклона поперечного профиля.
В тех случаях, когда нецелесообразно или невозможно использовать абсолютные значения математического ожидания и среднеквадратического отклонения, есть смысл применять
коэффициенты |
сглаживания |
Ky ,K , |
равные |
отношению |
|
|
33 |
|
|
среднеквадратических отклонений параметров рельефа до прохода и после прохода ЗТМ [46].
Сравнительный анализ автогрейдеров, осуществляющих планировочные работы, целесообразно проводить с помощью векторного критерия
|
(1.49) |
K [Ky ,K ,m]Т . |
Применяемый критерий K не исключает использования в данной работе единичных критериев более низкого иерархического уровня, например, критериев устойчивости и качества систем управления, показателей переходных процессов и амплитудно-частотных характеристик, времени запаздывания и величины перерегулирования и др.
Таким образом, задача повышения эффективности каких-либо параметров автогрейдера сводится к соблюдению следующих тенденций:
Ky max, K max, m min.
34
2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ РАБОЧЕГО ПРОЦЕССА АВТОГРЕЙДЕРА
2.1. Морфологический анализ конструкции автогрейдера
Декомпозиция расчетных схем, морфологический анализ конструкций автогрейдеров, созданные на его основе математические модели подсистем с возможностью формирования различных обобщенных моделей землеройно-транспортных машин методом структурно-кинематического объединения (композиции) агрегатных динамических подсистем позволили разработать алгоритм и методику принятия проектных решений при автоматизированном проектировании структуры и основных параметров автогрейдера
[18].
Под структурой понимается совокупность функциональных составляющих и их отношений, необходимых для достижения системой заданной цели [18], в данном случае – повышение точности профилирования и производительности. Решение задачи синтеза структур, имеющих требуемые характеристики, невозможно без классификации составных частей. Рассмотрение типовых технических и патентных решений позволяет провести их классификацию по числу структурных составляющих и характеру взаимосвязей.
С целью выявления основных структурных элементов и подсистем был проведён морфологический анализ известных компоновочных схем автогрейдеров (рис. 2.1).
Автогрейдер состоит из ряда элементов разных по назначению, форме и размеру, но выполняющих одну и ту же функцию в различных конструкциях при выполнении земляных работ [13].
Основными структурными элементами, представленными на рис. 2.1, являются: корпус 1, в который входят кабина оператора, двигатель, коробка перемены передач и прочее; балансирная тележка 2; шарнирно-сочлененная хребтовая балка 3; ось колес 4 и навесное оборудование с РО 5.
Из полученных элементов аналогично могут быть составлены практически все типы традиционных, а также ряд существенно модернизированных конструкций автогрейдеров [13]. При их составлении необходимо варьировать параметры, в наибольшей степени влияющие на планирующую способность автогрейдера. К
35
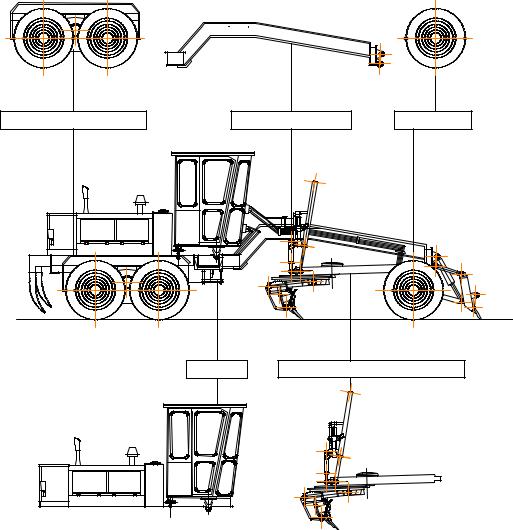
таким можно отнести: колесную схему, длину базы, расположение отвала в базе, размер балансирной тележки, конструкцию навесного оборудования.
Успешное решение вопроса автоматизированного синтеза новых конструктивных решений предлагаемым методом композиции требует наличия их математических моделей [13].
2. Балансирная тележка |
3. Хребтовая балка |
4. Ось колес |
|
|
1. Корпус |
5. Навесное оборудование с РО |
|
Рис. 2.1. Структурные элементы автогрейдера
2.2. Обобщенная математическая модель автогрейдера
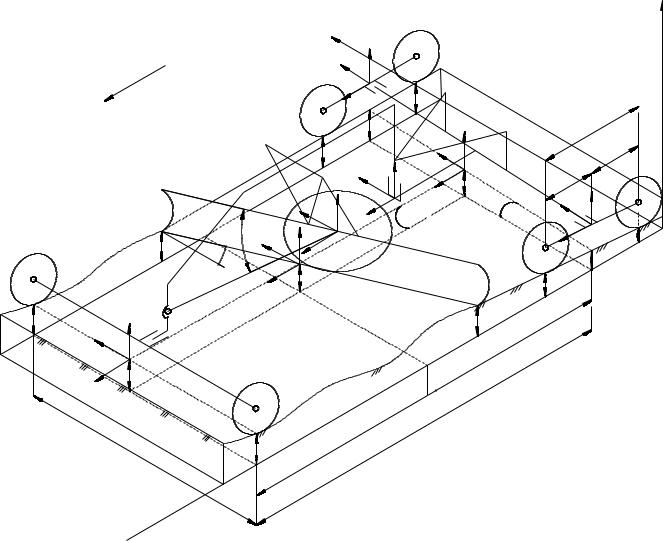
Для составления уравнений геометрических связей автогрейдера, рассмотрения перемещения РО в пространстве под действием различных факторов, определения динамических характеристик объекта при различных возмущающих и управляющих воздействиях составлена пространственная расчетная схема автогрейдера (рис. 2.2).
36
Z0
|
V |
|
ZБП |
|
|
|
|
|
|
|
Y2ПXБП |
|
|
ZРО |
ZТР |
|
YРОП |
XТР |
|
|
РО |
||
|
|
YРО |
|
Y1П |
Y1 |
XРО |
|
|
|
||
|
|
|
|
|
Z1 |
|
|
|
X1 |
|
|
|
L |
Y1Л |
|
|
3 |
||
 X0
X0
Y0
YБП |
Y3П |
|
LБ |
|
ZБ |
|
|
ZХР YХР |
|
LБ2 |
|
YБ |
|
||
Z |
L |
||
|
БЛ |
Б1 |
YТР |
XБ |
|
O |
XХР |
|
YБЛ |
|
|
|
XБЛ |
Y3Л |
|
|
Y2Л |
|
|
YРОЛ |
L2 |
|

 L
L
L1
Рис. 2.2. Пространственная расчетная схема автогрейдера
37
При составлении расчетной схемы были приняты допущения [101]:
-автогрейдер является пространственным шарнирносочлененным многозвенником;
-конструктивные элементы автогрейдера абсолютно жесткие;
-люфты в шарнирных сочленениях автогрейдера отсутствуют;
-отвал постоянно заглублен в обрабатываемый грунт;
-рассматриваются малые перемещения элементов расчетной схемы;
-уплотнение грунта колесами пренебрежимо мало;
-автогрейдер движется прямолинейно с постоянной скоростью;
-эффективная длина РО принимается примерно равной ширине колеи автогрейдера.
Указанные допущения не влияют на правомерность выводов, и позволяют получить результаты расчетов с необходимой точностью.
Для описания положения элементов пространственной расчетной схемы в пространстве принята правая ортогональная инерциальная система координат O0X0Y0Z0 , связанная с грунтом. Ось O0X0 совпадает с направлением движения автогрейдера, ось O0Y0 направлена вертикально вверх [101].
Элементами пространственной расчетной схемы выбраны основные узлы автогрейдера, совершающие независимые перемещения друг относительно друга и определяющие его кинематические характеристики: хребтовая балка, подмоторная рама, левый балансир, правый балансир, передняя ось, тяговая рама и поворотный круг с РО.
Положение элементов расчетной схемы определяется положением соответствующих правых локальных систем координат
(табл. 2.1).
|
|
Таблица 2.1 |
Локальные системы координат элементов расчетной схемы |
||
|
|
|
Элемент пространственной |
Системы координат элементов |
|
расчетной схемы |
Основное обозначение |
Дополнительноеобозначение |
|
|
|
Передняя ось |
O1X1Y1Z1 |
O1X1Y1Z1 |
Балансир правый |
OБПXБПYБПZБП |
O2X2Y2Z2 |
Балансир левый |
OБЛXБЛYБЛZБЛ |
O3X3Y3Z3 |
Рама подмоторная |
OБXБYБZБ |
O4X4Y4Z4 |
Хребтовая балка |
OХРXХРYХРZХР |
O5X5Y5Z5 |
Тяговая рама |
OТРXТРYТРZТР |
O6X6Y6Z6 |
Поворотный круг с РО |
OРОXРОYРОZРО |
O7X7Y7Z7 |
|
38 |
|

Для определения положения в пространстве произвольных точек
элементов расчетной |
схемы в |
любой |
момент |
времени и |
|
установления |
связи |
между |
положением РО и |
параметрами |
|
сформированной |
поверхности |
были |
получены |
уравнения |
|
геометрических связей автогрейдера.
Положение РО в пространстве можно охарактеризовать
вертикальной координатой центральной точки отвала YРО |
и углом |
перекоса РО . |
|
Из расчетной схемы видно, что |
|
YРО (t) (1 K) Y1(t) K YБ (t), |
(2.1) |
где К - коэффициент базы, характеризующий положение РО в колесной базе автогрейдера, Y1, YБ – вертикальные координаты центральных точек передней оси и балансирной тележки.
|
|
K |
L1 |
; |
|
|
(2.2) |
|
|
|
|||||||
|
|
|
|
L |
|
|||
Y (t) |
Y1П (t) Y1Л (t) |
; |
|
(2.3) |
||||
|
|
|||||||
1 |
2 |
|
|
|
||||
|
|
|
|
|||||
Y |
(t) |
YБЛ (t) YБП (t) |
; |
(2.4) |
||||
|
||||||||
Б |
2 |
|
|
|
||||
где Y1Л ,Y1П - вертикальные координаты передних левого и правого |
||||||||
колес автогрейдера, L- |
расстояние между осями передних колес и |
|||||||
балансирной тележки автогрейдера, L1- расстояние от оси передних колес до центральной точки режущей кромки РО.
Для определения вертикальных координат осей правого балансира YБП и левого балансира YБЛ используем коэффициент базы
балансира [110] |
КББ LБ1 LБ . |
(2.5) |
|
|
|
||
|
Тогда из пространственной расчетной схемы можно записать |
||
выражение изменения вертикальных YБЛ и YБП |
|
||
|
YБЛ |
(1 КББ ) Y2Л КББ Y3Л ; |
(2.6) |
|
YБП (1 КББ ) Y2П КББ Y3П , |
(2.7) |
|
где |
Y2Л ,Y2П ,Y3Л ,Y3П |
- соответственно вертикальные |
координаты |
переднего и заднего колес балансирной тележки. |
|
||
|
Заднее колесо балансирной тележки движется с запаздыванием |
||
Б |
по неровностям рельефа, находящимся под передним колесом, |
||
равным величине |
Б LБ V , |
(2.8) |
|
|
|
||
|
|
39 |
|