

1930
.pdfМинистерство образования и науки РФ Федеральное государственное бюджетное образовательное
учреждение высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Кафедра «Автоматизация производственных процессов и электротехника»
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания по выполнению курсовых работ
(для студентов специальностей 220301, 140607)
Составители: В.С. Щербаков, Р.Ю. Сухарев
Омск
СибАДИ
2011
УДК 681.5 БКК 32.965-01
Рецензент: д.т.н., профессор, зав. каф. «Электроника и автотракторное электрооборудование» Денисов В.П.
Работа одобрена НМСС 220301 «Автоматизация технологических процессов и производств» в качестве методических указаний по выполнению курсовых работ и учебно–методических материалов к самостоятельной работе по дисциплине «Теория автоматического управления» для студентов специальностей 220301, 140607.
Теория автоматического управления: методические указания по выполнению курсовых работ (для студентов специальностей 220301, 140607) / Сост.: В.С. Щербаков, Р.Ю. Сухарев. – Омск: СибАДИ, 2011. – 36 с.
Рассматриваются вопросы анализа линейных систем, исследования на устойчивость, нахождения показателей качества переходных процессов. Даются примеры расчета корректирующих звеньев и их настройки.
Табл. 2. Ил. 20 Прил. 4. Библиогр. 6 назв.
© ФГБОУ ВПО «СибАДИ», 2011
2
|
Оглавление |
|
Введение..................................................................................................................... |
4 |
|
1. |
Задание на курсовую работу ................................................................................. |
4 |
2. |
Исходная схема системы стабилизации угловой скорости двигателя |
|
постоянного тока и принцип ее действия................................................................. |
5 |
|
3. |
Структурная схема системы стабилизации и передаточные функции ее |
|
элементов ................................................................................................................... |
7 |
|
4. |
Проверка статической ошибки.............................................................................. |
8 |
5. |
Корректирующее звено.......................................................................................... |
8 |
6. |
Критерий устойчивости Гурвица........................................................................ |
11 |
7. |
Критерий устойчивости Михайлова ................................................................... |
13 |
8. |
Критерий устойчивости Найквиста..................................................................... |
15 |
9. |
Логарифмический критерий устойчивости ........................................................ |
18 |
10. Построение графика переходного процесса..................................................... |
21 |
|
11. Проверка расчетов с помощь моделирования системы в среде MATLAB |
|
|
Simulink.................................................................................................................... |
22 |
|
12. Требования к оформлению работ...................................................................... |
25 |
|
13. Порядок защиты курсовых работ...................................................................... |
27 |
|
Библиографический список..................................................................................... |
28 |
|
Приложение 1........................................................................................................... |
29 |
|
Приложение 2........................................................................................................... |
31 |
|
Приложение 3........................................................................................................... |
33 |
|
Приложение 4........................................................................................................... |
34 |
|
3
Введение
В курсовой работе по теории автоматического управления (ТАУ) требуется провести анализ и синтез системы автоматического регулирования (САР), содержащей контур с жесткой отрицательной обратной связью. Учитывая тот факт, что расчет систем различной физической природы, принадлежащих к определенному классу, одинаков, предложена САР угловой скорости двигателя постоянного тока.
Система, предназначенная для расчета, является линейной системой третьего порядка, дифференциальные уравнения каждого звена которой могут быть составлены с применением известных в электромеханике законов.
САР состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбрать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались.
Курсовая работа выполняется в течение семестра и способствует закреплению знаний по дисциплине «Теория автоматического управления». Выполнение работы позволит студентам получить навык исследования одноконтурных систем управления на устойчивость различными способами как с использованием ЭВМ, так
ибез их использования.
1.Задание на курсовую работу
1.Подробно описать назначение и принцип действия САР.
2.Составить структурную схему системы и определить передаточные функции звеньев.
3.Исследовать систему на устойчивость по 4 критериям устойчивости.
4
4.Подсчитать передаточный коэффициент системы, найти статическую ошибку и сделать вывод о необходимости применения корректирующего звена.
5.Включить в схему корректирующее звено, заданное в таблице (см. прил. 2). Найти его передаточную функцию и численные значения параметров.
6.Исследовать скорректированную систему на устойчивость по 4 критериям устойчивости.
7.Составить передаточную функцию замкнутой системы и по ней написать дифференциальное уравнение замкнутой системы. Решить
полученное |
дифференциальное уравнение при условии, что |
Mc const . |
Построить график (t) . Найти по графику (t) |
показатели качества переходного процесса.
8.Построить структурную схему системы в программном комплексе MATLAB Simulink, найти показатели качества переходного процесса, исследовать систему на устойчивость.
9.Сравнить результаты расчетов со значениями, полученными в программном комплексе MATLAB Simulink, и сделать соответствующие выводы.
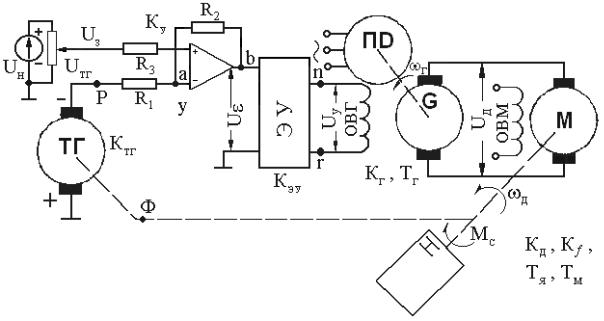
2.Исходная схема системы стабилизации угловой скорости двигателя постоянного тока и принцип ее действия
Рис. 1. Принципиальная схема системы стабилизации угловой скорости ДПТ для нечетных вариантов
5

Рис. 2. Принципиальная схема системы стабилизации угловой скорости ДПТ для четных вариантов
Принцип работы исходной системы
Скорость вращения вала двигателя постоянного тока (ДПТ) задается напряжением UЗ, которое через сопротивление R3 подается на вход операционного усилителя (рис.1). Также на него подается через сопротивление R1 напряжение с тахогенератора UТГ. При увеличении нагрузки MC уменьшается скорость вращения вала двигателя ωД и соответственно снижается напряжение тахогенератора UТГ. Суммарное напряжение Uε увеличивается, следовательно, увеличивается напряжение обмотки возбуждения генератора (ОВГ), напряжение на двигателе и угловая скорость. При уменьшении нагрузки MC увеличивается напряжение тахогенератора UТГ. Суммарное напряжение Uε уменьшается, при этом уменьшается напряжение ОВГ и угловая скорость ДПТ снижается.
Принцип работы системы стабилизации, представленной на рис. 2 аналогичен.
Угловая скорость ωД изменяется с изменением нагрузки на валу двигателя МС. В результате можно записать, что помеха равна:
f(t) = kf MC(t), (1)
где kf – передаточный коэффициент по каналу помехи. Стабилизация угловой скорости ωД достигается за счет подачи
напряжения UД на якорную обмотку двигателя. САР является статической, поэтому работает со статической ошибкой, которая не должна превысить заданной величины.
6

3.Структурная схема системы стабилизации
ипередаточные функции ее элементов
Принципиальные схемы систем стабилизации (рис. 1,2) преобразуются в блок–схемы (рис. 3,4), по которым выводятся дифференциальные уравнения отдельных элементов.
Рис. 3. Блок–схема системы стабилизации угловой скорости ДПТ для нечетных вариантов
Рис. 4. Блок–схема системы стабилизации угловой скорости ДПТ для четных вариантов
Дифференциальные уравнения элементов системы:
1. ЭУ – электронный усилитель:
2. Г – генератор: |
UУ U |
kЭУ . |
|
|
(2) |
|||
dUД |
|
|
|
|
|
|
||
T |
U |
Д |
k U |
У |
. |
(3) |
||
dt |
||||||||
1 |
|
1 |
|
|
||||
|
|
7 |
|
|
|
|
|
|

|
|
3. |
M – двигатель постоянного тока: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
T |
|
T |
|
|
d2 Д |
T |
|
d Д |
|
|
k |
|
U |
|
k |
|
(T |
|
|
dМ |
Н |
М |
|
). (4) |
|
|
|
dt2 |
dt |
|
|
|
|
|
dt |
|
|
||||||||||||||
|
Я |
М |
|
М |
|
|
Д |
|
|
Д |
|
У |
|
f |
|
Я |
|
|
|
Н |
|
||||
|
|
4. |
ТГ – тахогенератор: |
UТГ |
Д kТГ . |
|
|
|
|
|
|
|
|
(5) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
По уравнениям звеньев САР вывести передаточные функции.
4. Проверка статической ошибки
Передаточная функция разомкнутой системы:
WРАЗ (p) WЭУ (p) WГ (p) WД (p) WТГ (p); |
|
|
(6) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
kД |
|
|
|
|
|
|
|
||
W |
(p) k |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
; |
|
(7) |
||
|
|
|
|
|
T |
|
|
|
T |
|
p2 T |
|
|
|
|
|||||||||||||
РАЗ |
|
|
ЭУ |
T p 1 |
Я |
|
p 1 ТГ |
|
|
|
||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
М |
|
|
М |
|
|
|
|
|
|
|
|||||||
WРАЗ ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kРС |
|
|
|
|
|
|
|
|
, |
(8) |
|||
(T p 1) |
(T |
Я |
T |
М |
p2 |
T |
М |
p 1) |
||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где kРC kЭУ k1 |
kД kТГ |
– |
коэффициент |
передачи |
разомкнутой |
|||||||||||||||||||||||
системы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Статическая ошибка |
|
|
|
f (t) |
|
|
|
kf MC |
(t) |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
СТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
(9) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 kРС |
|
|
|
|
|
1 kРС |
|
|
|
|
|
|
|
||||||||||
Полученную статическую ошибку необходимо сравнить с разрешенной (см. прил. 1) и принять решение о необходимости ввода
всистему корректирующего звена.
5.Корректирующее звено
Рис. 5. Блок–схема системы стабилизации угловой скорости ДПТ с корректирующим звеном для нечетных вариантов
8
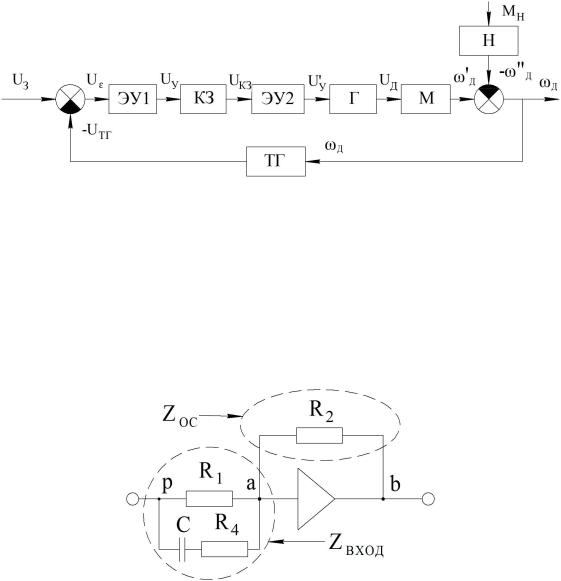
Рис. 6. Блок–схема системы стабилизации угловой скорости ДПТ с корректирующим звеном для четных вариантов
Корректирующее звено подбирается из прил. 2 и подключается в основную схему в указанных точках (рис. 7,8).
Пример расчета активного корректирующего звена (рис. 7):
Рис. 7. Активное корректирующее звено
Передаточная функция активного корректирующего звена:
|
WКЗ |
(p) |
ZОС |
|
; |
|
|
|
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
ZВХОД |
|
|
|
||||
|
|
ZОС R2; |
|
|
|
|
|
|
||||||
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
; |
|
|
|
ZВХОД |
R1 |
R4 |
|
1 |
|
||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
Cp |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
(R4 1) C p 1 |
; |
||||||||||
|
|
|
||||||||||||
ZВХОД |
|
R1 (R4 C p 1) |
||||||||||||
(10)
(11)
(12)
(13)
9
|
|
|
|
|
|
ZОС |
|
|
|
R2 |
|
|
(R4 1) C p 1 |
; |
(14) |
||||||
|
|
|
|
|
|
ZВХОД |
R1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
R4 C p 1 |
|
|||||||||
|
|
|
|
|
|
W |
КЗ |
|
(p) k |
0 |
|
T02 |
p 1 |
, |
(15) |
||||||
|
|
|
|
|
|
|
T |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p 1 |
|
||||||
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
где k |
0 |
|
; T |
R C ; T |
|
(R |
4 |
1) C. |
|
||||||||||||
R |
|
|
|||||||||||||||||||
|
|
01 |
4 |
|
02 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
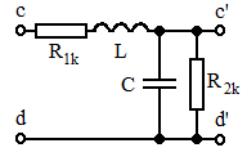
Пример расчета пассивного корректирующего звена (рис. 8):
Рис. 8. Пассивное корректирующее звено
Передаточная функция пассивного корректирующего звена:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WКЗ (p) |
|
|
ZОС |
|
; |
|
|
|
|
|
|
|
|
(16) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZВХОД |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
Cp; |
|
|
|
|
|
|
|
|
|
(17) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZОС R2k |
|
|
|
R2k |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
Z |
ВХОД |
R |
|
|
|
Lp |
|
|
|
|
; |
|
|
|
|
(18) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1k |
|
|
|
|
|
|
|
|
R2kCp 1 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
R2k C p 1 |
|
|
|
|
|
|
; |
(19) |
||||||||||||||
|
|
|
|
Z |
ВХОД |
L R |
|
|
C p2 |
(R |
R |
C L)p R |
R |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2k |
|
|
|
|
|
|
|
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|
1k |
2k |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZОС |
|
|
|
|
|
|
R2k |
|
|
; |
|
|
|
|
|
|
|
|
(20) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
C p 1 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
ZОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
2k |
|
|
|
R2k |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
(21) |
|||||||||
|
|
|
|
|
L R |
|
|
C p2 |
(R |
R |
C L)p R |
R |
|
||||||||||||||||||||||||||||
|
|
|
|
Z |
ВХОД |
|
|
2k |
2k |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|
1k |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
WКЗ (p) |
|
|
|
|
|
|
|
|
|
|
k0 |
|
|
|
|
|
|
, |
|
|
|
|
(22) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
p2 T p 1 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
02 |
|
|
|
|
|
|
|
|
|
|
|
|
где k |
|
|
|
|
|
R2k |
|
|
; T2 |
|
|
L R2k |
C |
; |
T |
|
|
|
|
R1k R2k |
|
C L |
. |
|
|
|
|
||||||||||||||
|
0 |
|
R |
|
R |
01 |
|
|
|
R |
|
R |
|
|
|
02 |
|
|
|
|
|
R |
R |
|
|
|
|
|
|||||||||||||
|
|
|
|
1k |
|
|
2k |
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|
|
|
|
1k |
|
|
|
2k |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||