

1926
.pdfМАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ МЕХАНИЧЕСКИХ СИСТЕМ В MATLAB
Методические указания и задания для выполнения курсовой работы по дисциплине
«Математическое моделирование» для студентов дневной и заочной форм обучения технических направлений и специальностей
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Кафедра «Информационные технологии»
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ МЕХАНИЧЕСКИХ СИСТЕМ В MATLAB
Методические указания и задания для выполнения курсовой работы по дисциплине «Мате-
матическое моделирование» для студентов дневной и заочной форм обучения технических направлений
и специальностей
Составители: А.А. Соловьев, М.С. Корытов (в авторской редакции)
Омск
СибАДИ
2013
УДК 519.876.5 ББК 22.18
Рецензент – д.т.н., проф. Чуканов С.Н.
Методические указания и задания для выполнения курсовой работы по дисциплине «Математическое моделирование» для студентов очной и заочной форм обучения для технических направлений и специальностей факультетов «Автомобильный транспорт», « Нефтегазовая и строительная техника» в соответствии требованиями ФГОС ВПО.
Математическое моделирование механических систем в MATLAB: методи-
ческие и задания для выполнения курсовой работы по дисциплине «Математическое моделирование» для студентов очной и заочной форм обучения технических направлений и специальностей / А.А. Соловьев, М.С. Корытов. – Омск: СибАДИ, 2013. 28 с.
Приведены методические указания и варианты заданий для выполнения курсовой работы по дисциплине «Математическое моделирование». Методические указания могут быть полезны для студентов технических направлений и специальностей.
Табл. 1. Библиогр.: 4 назв.
© ФГБОУ ВПО «СибАДИ», 2013
Введение
Студенты очной и заочной форм обучения по указанию преподавателя должны выполнить индивидуальное задание курсовой работы по дисциплине «Математическое моделирование». Вариант выполнения студентом получается у преподавателя.
Методические указания по выполнению курсовой работы
1. Для заданного в соответствии с индивидуальным вариантом (номер индивидуального варианта берется у преподавателя) типа базового шасси машины (см. ПРИЛОЖЕНИЕ № 1) и механизма рабочего оборудования (см. ПРИЛОЖЕНИЕ № 2) разработайте модель механической подсистемы всей машины с использованием блоков пакета SimMechanics системы MATLAB:
самостоятельно определите типы и количество блоков тел и шарниров SimMechanics для вашего механизма (с использованием учебного пособия [1] из списка рекомендуемой литературы);
базовое шасси (его наиболее массивная часть для двухзвенного шасси, расположенная слева на рисунке исходных данных) имеет максимально возможное для твердого тела в трехмерном пространстве число степеней свободы. Опорные элементы звеньев базового шасси опишите при помощи тел Фохта с коэффициентами жесткости и вязкости вдоль трех осей неподвижной Декартовой системы координат, аналогичными коэффициентам на рис. 51 учебного пособия [1]. Коэффициенты жесткости и вязкости степеней свободы шарнирного сочленения шасси либо переднего балансирного моста (при их наличии) не учитываются (имеют нулевые значения).
проставьте соответствующие размеры и массы в окнах настойки блоков. Центры масс звеньев рабочего оборудования, кроме последнего звена рабочего органа (РО), расположены на расстояниях, равных половине соответствующих размеров исходных данных li, i=1,2,3,…n смещения вдоль стержней квадратного сечения (см. ПРИЛОЖЕНИЕ № 3). Центр масс РО расположен в принадлежащей РО конечной точке последнего линейного размера (размера li, имеющего максимальный для данного варианта индекс i, т.е. размера, последнего в цепи размеров);
используйте блоки задания начальных значений углов поворота и линейных смещений подвижных звеньев рабочего оборудования. Все угловые начальные координаты имеют нулевые значения. Начальные значения линейных координат подвижных звеньев механизма определяются исходными данными, т.е. линейными размерами li, i=1,2,3,…n.
3
2.С использованием блоков «приводов» шарниров и групп блоков, описывающих вязкостно-жесткостные свойства приводов, добавьте возможность движения механизма рабочего оборудования машины по каждой из 4-х степеней свободы. Коэффициенты жесткости и вязкости примите 2000000 и 200000 соответственно для всех шарниров.
3.Из начального положения, изображенного на рисунке с исходными размерами, смоделируйте движение механизма в обе стороны (в обоих возможных направлениях изменения каждой координаты) как по линейным, так и по угловым координатам механизма рабочего оборудования. Базовое шасси при этом фиксировано, т.е. неподвижно в больших перемещениях (что не исключает возможности его малых колебаний относительно положения равновесия). Заданные скорости движения звеньев, изменяющиеся скачкообразно от 0 до номинального варьируемого значения, затем опять до 0, необходимо задать в пределах от 0,1 до 0,9 м/с (рад/с для угловых координат) с шагом в 0,2. Время движения с ненулевой скоростью во всех расчетных случаях – 1 с. Время моделирования переходного процесса – до полного затухания колебаний, т.е. не менее 10-15 с. Получите графики функциональных зависимостей максимального линейного отклонения в пространстве точки центра масс груза от собственного конечного (после окончания движения подвижных звеньев) положения равновесия,
от скоростей движения каждой из координат механизма. Кроме того, не-
обходимо исследовать все возможные расчетные случаи сочетания движений всех четырех подвижных управляемых координат механизма рабочего оборудования с одинаковыми скоростями в различных направлениях движения, приведя результаты исследования в виде таблиц.
Максимально возможное отклонение центра масс груза в пространстве при самом неблагоприятном сочетании направлений движения (при скоростях движения всех звеньев 0,9 м/с (рад/с)) примите за максимальную погрешность механизма. Сохраните при этом значения варьируемых параметров.
4.При самом неблагоприятном сочетании направлений движения используйте визуализацию встроенными средствами SimMechanics для получения анимации движения звеньев механизма.
5.Разработайте модель воздействия со стороны микрорельефа поверхности грунта или дорожного полотна на ходовые элементы базового шасси машины при моделировании ее движения с различными скоростями. Звенья механизма рабочего оборудования при этом не совершают управляемых движений. Получите функциональные зависимости статистических параметров колебаний центра масс РО (математического ожидания и дисперсии отклонений от собственного равновесного положения центра масс РО при отсутствии движения машины) от скорости перемещения базового шасси по микрорельефу грунта с корреляционной функцией
4

R(t) 5 10 2 2 e 0,5 t . Скорость движения шасси изменяется от 5 до 45 км/ч с шагом в 10 км/ч. Представьте полученные функциональные зависимости графически. Длина пятна контакта при сглаживании микрорельефа ходовым элементом шасси – 30 см.
6.Для условий, описанных в предыдущем пункте, получите примеры временных зависимостей нормальных реакций на 4-х опорных элементах шасси машины при ее движении, а также функциональные зависимости математического ожидания и дисперсии среднего значения наиболее нагруженной опоры. Определите частоту потери устойчивости машины при всех моделируемых скоростях (ситуация отрыва любой из опор от грунта, что выражается в отрицательном значении нормальной реакции на опоре) при движении в течение 10 минут с количеством независимых экспериментов по 100 для каждой скорости. Частота потери устойчивости равна отношению числа независимых экспериментов, в которых устойчивость была потеряна, к общему числу независимых экспериментов при данной скорости.
7.С использованием учебного пособия [2] замените блоки, задающие движение механизма рабочего оборудования машины (п. 2) элементами пакета SimHydraulics. Параметры элементов гидропривода могут быть приняты равными аналогичным параметрам в примерах [2].
В пояснительной записке к курсовой работе должны быть приведены: расчетная схема механизма, принципиальные упрощенные гидросхемы приводов рабочего оборудования, схема Simulink-диаграммы механизма и привода в обозначениях Simulink, описание всех блоков Simulinkдиаграммы, результаты всех исследований (графики, таблицы) с их текстовым описанием.
Преподавателю сдаются: пояснительная записка в бумажном виде, а также в электронном виде – два файла модели механизма (mdl-файлы): без гидропривода и с гидроприводом.
Список рекомендуемой к изучению литературы
1.Моделирование и визуализация движений механических систем в MATLAB: учебное пособие / В. С. Щербаков [и др.]; СибАДИ. – Омск : СибАДИ, 2008. – 84 с.
2.Моделирование гидравлических систем в MATLAB: учебное пособие / А. А. Руппель, А. А. Сагандыков, М. С. Корытов ; СибАДИ, Кафедра АППиЭ. – Омск : Си-
бАДИ, 2009. – 171 с.
3.Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6® в математике и модели-
ровании. Серия «Библиотека профессионала». – М.: СОЛОН-Пресс, 2009. – 576 с. // ЭБС «Книгафонд»
4.SimMechanics User's Guide. Version 2. The MathWorks, Inc., November 2002.
522 p.
5
ПРИЛОЖЕНИЯ
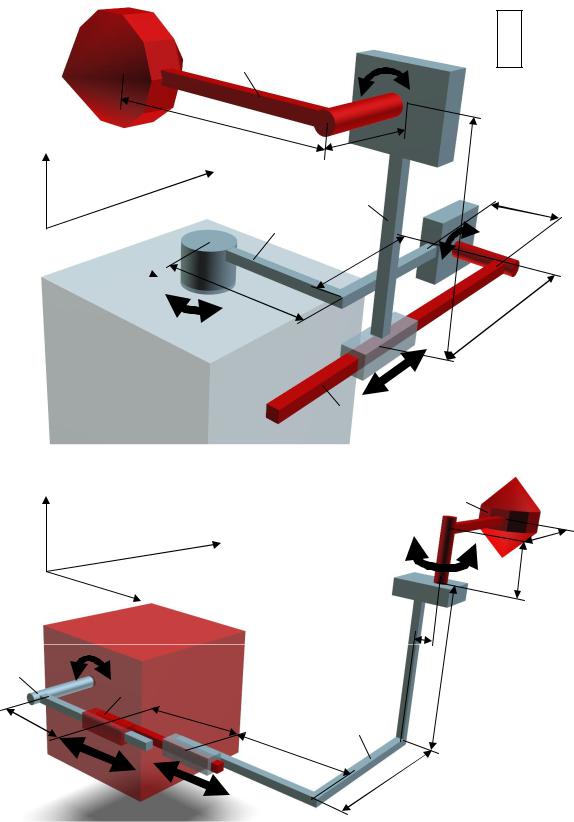
ПРИЛОЖЕНИЕ № 1 РАБОЧИЕ МЕХАНИЗМЫ
m4
l7
Y0 |
X0 |
l6 |
m3
m1
l2
Z0
l1
m2
1
l5
l3
l4
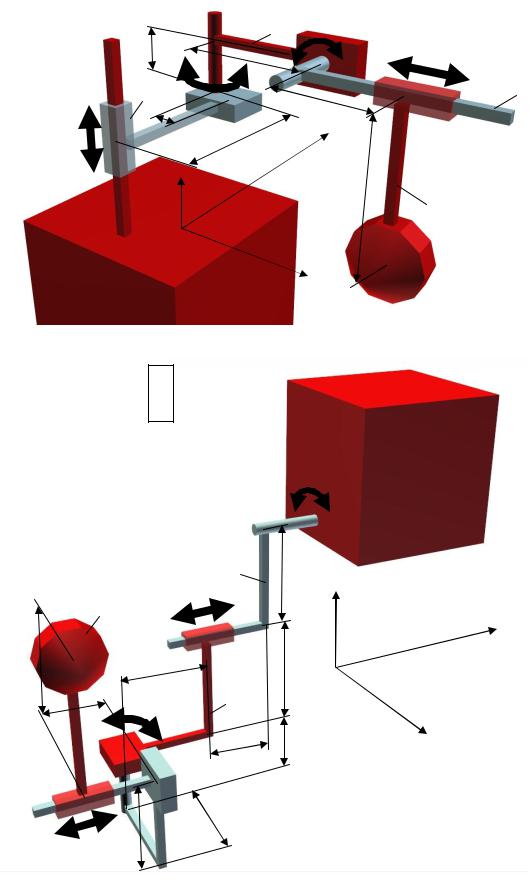
X0 |
|
2 |
m4 |
|
|
|
|||
Y0 |
|
|
|
|
|
|
|
l8 |
|
|
|
|
||
Z0 |
|
|
l7 |
|
|
|
|
||
m1 |
|
|
l6 |
|
|
|
l5 |
||
m2 |
|
|
||
|
|
|
||
l2 |
|
|
m3 |
|
l1 |
l3 |
|||
|
||||
|
|
|
l4 |
|
6
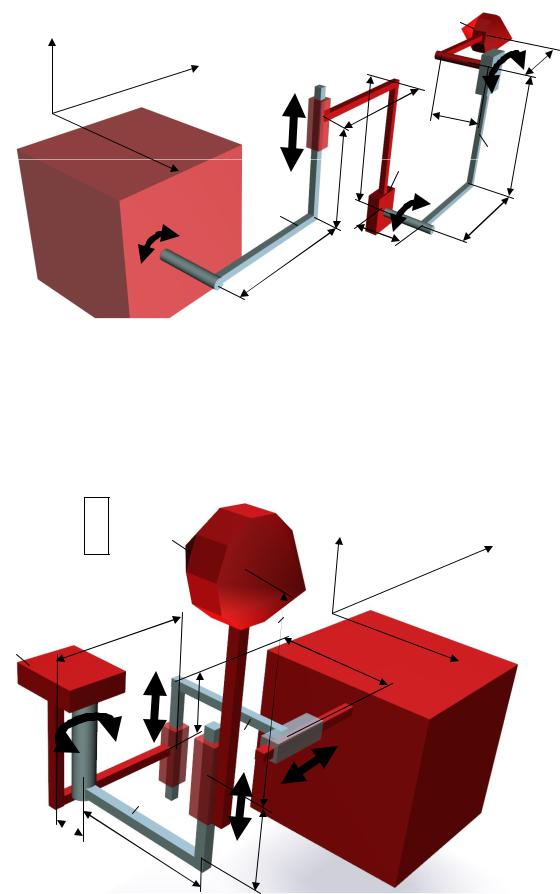
l3 |
m2 |
|
3 |
|
|
|
|
||
|
|
|
|
|
m1 |
l4 |
|
|
m3 |
|
|
|||
|
|
|
||
|
|
l5 |
||
l2 |
l1 |
|
|
|
|
X0 |
|||
|
|
|||
Y0 |
|
l6 |
||
|
|
m4 |
||
|
|
Z0 |
||
4
m1 l1
m4 |
Y0 |
|
X0 |
||
|
l9
l6 l2
l8 m2
l4 |
Z0 |
l3 |
 l5 l7 m3
l5 l7 m3
7
|
|
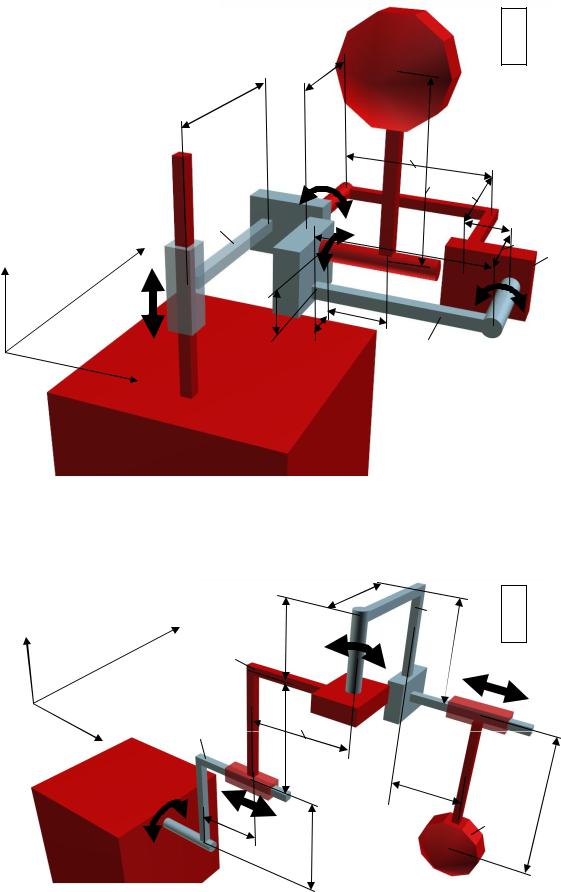
5 |
|
m4 |
Y0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
l9 |
|
X0 |
|||
|
|
|
l4 |
l7 |
|
|
|
l3 |
l8 |
|
|
|
m2 |
m3 |
|
|
|
l2 |
|
|
Z0 |
|
||
|
|
m1 |
l6 |
|
|
|
|
l5 |
|
|
|
|
|
|
|
|
|
l1 |
|
6 m4 X0 Y0
l3 |
l7 |
|
m2 |
l1 |
Z0 |
|
|
l2
m1
m3
l4
l5 l6
8
l3
l2 l1 
m1
X0 |
l9 |
Y0
l10
l12
l11
Z0
l6
Y0 |
X0 m2 l5 |
m1 l4
Z0
l3
l1
l2
7
 m4
m4
l4
l5 l6
m3
m3
l7
l8
l7
l8
m2
8
l9
m4
9