


Желательно, чтобы Хп было как можно меньше.
Основная погрешность преобразования – это максимальная разность между фактическим значением выходного сигнала Хвых ф и его номинальным значением Хвых н, выраженная в процентах от разности предельных значений выходного сигнала Хвых max и Хвых min:
СибАДХвыхф Хвыхн 100%. И(3.2.7) Хвыхmax Xвыхmin
нам ческ й режим работы датчика характеризуется кривой динам ческого процесса, которая отражает характер изменения выходного с гнала в функции времени при скачкообразном изменении сигнала на входе (р с. 3.2.4).
Хвх
t
Хвых
t
t0
Рис. 3.2.4. Временные диаграммы динамического режима датчика
3.3. Сельсины
Сельсин – это миниатюрная электрическая машина, сходная с трехфазным синхронным генератором или двигателем.
Конструктивное исполнение сельсинов может быть различным. Обычно ротор имеет однофазную обмотку, а статор – трехфазную (три обмотки, расположенные в пространстве друг относительно друга под углом 120°).
84

Схема включения сельсинной пары в индикаторном режиме при- |
|||
ведена на рис. 3.3.1. |
|
||
|
ельсины всегда работают в паре. Один из сельсинов называется |
||
сельсином-датчиком СД, а другой – сельсином-приемником СП. Угол |
|||
поворота ротора СД преобразуется в электрический сигнал, который |
|||
передается по проводам (на любое расстояние) и воспринимается СП. |
|||
Поступивший сигнал преобразуется в такое же угловое перемещение |
|||
ротора |
П. В с стемах автоматики сельсинные пары применяются в |
||
двух основных реж мах: индикаторном и трансформаторном. |
|||
|
|
~110 В |
|
|
|
СД |
СП |
|
|
Рис. 3.3.1. Индикаторный режим работы сельсинной пары |
|
|
Роторы обоих сельсинов подключены к источнику переменного |
||
тока, трехфазные статорные обмотки, включенные по схеме «звез- |
|||
да», соединены между собой. |
|
||
|
Однофазный переменный ток ротора создает в магнитной цепи |
||
каждого сельсина переменный магнитный поток, который индуциру- |
|||
ет в обмотках статора ЭДС. При одинаковых положениях роторов |
|||
СД |
СП ЭДС в каждой фазе СД уравновешивается соответствующей |
||
ЭДС СП. Поэтому ток в обмотках статора отсутствует. При повороте |
|||
ротора СД ЭДС в обмотках статора СД изменяются, в результате че- |
|||
го нарушается равновесие с ЭДС обмоток статора СП. Под действи- |
|||
СибАДИ |
|||
ем разности ЭДС в цепи статоров протекают уравнительные токи. |
|||
|
Взаимодействие этих токов с магнитным потоком создает на ва- |
||
лах СД и СП синхронизирующий момент, стремящийся свести угол |
|||
рассогласования θ=αСД–αСП к нулю. Однако этот момент мал и прак- |
|||
тически достаточен лишь для перемещения стрелок или других ука- |
|||
зательных устройств, поэтому индикаторный режим применяется |
|||
обычно в системах контроля. |
|
||
85

В зависимости от величины θ сельсины делятся на 4 класса точ- |
|||
ности, каждый из которых определяется по максимально возможной |
|||
средней ошибке |
1 2 , |
|
|
|
|
(3.3.1) |
|
|
|
2 |
|
где θ1 и θ2 – абсолютные значения максимальных ошибок, получен- |
|||
ные при вращен |
ротора СД по и против часовой стрелки. |
||
ельс нная пара рассматривается как безынерционное устройст- |
|||
во. Погрешность сельсинов обычно не превышает десятых долей |
|||
градуса. Главными пр чинами возникающих погрешностей являются |
|||
дефекты |
зготовлен я: электрическая |
магнитная асимметрия, не- |
|
точная центровка, элл птичность ротора и т.д. |
|||
хема включен я сельсинной пары в трансформаторном режи- |
|||
ме приведена на р с. 3.3.2. |
|
||
|
|
|
N |
~110 В |
V |
|
|
|
|
СД |
СП |
Рис. 3.3.2. Трансформаторный режим работы сельсинной пары |
|||
Отличие трансформаторного режима от индикаторного в том, что |
|||
СибАДИ |
|||
однофазная обмотка ротора СП подключается не к источнику пита- |
|||
ния, а ко входу усилителя (т.е. является выходной). На лабораторном |
|||
стенде ротор СП заторможен, а в схемах следящих систем ротор ме- |
|||
ханически жестко связан с валом исполнительного двигателя. Такая |
|||
схема применяется для передачи движения на исполнительные уст- |
|||
ройства, нагруженные большими моментами. |
|||
86
Выходное напряжение будет равно нулю при разности углов поворота 90°, так как результирующий магнитный поток в этом случае не будет пересекать витки ротора СП. Это положение принимается за нулевое. Любое рассогласование сопровождается появлением напряжения на выходе, причем выходное напряжение является функ-
цией синуса угла рассогласования: |
|
СибАДИ |
|
uвых=k sinθ, |
(3.3.2) |
где k=1 В/град. |
|
Для достаточно малых углов |
|
uвых=k θ. |
(3.3.3) |
Эти выражен я отражают не только зависимость величины выходного напряжен я от угла рассогласования, но и зависимость фазы этого напряжен я от знака рассогласования. При изменении знака рассогласован я фаза выходного напряжения меняется на 180°.
Трансформаторный режим работы сельсинов широко применяется в следящих системах, предназначенных для синхронного вращения двух валов, механически между собой не связанных. Один из валов является входным (например, вал стрелкового прицела) и обычно требует для своего перемещения небольших усилий, другой – выходным (например, вал, связанный с самолетной пушкой), для его перемещения, как правило, необходимы значительные усилия.
3.4. Дешифраторы, шифраторы, триггеры и счетчики
На базе логических элементов построены такие устройства, как шифраторы, дешифраторы. Условное обозначение таблица истинности шифратора приведены в табл. 3.4.1.
Шифратор (кодер) преобразует сигнал на одном из его входов в n-разрядное двоичное число. При появлении сигнала логической единицы на одном из десяти входов на четырех выходах шифратора будет присутствовать соответствующее двоичное число.
Дешифратор (декодер) преобразует код, поступающий на его n-входов, в сигнал логической единицы только на одном из его выходов. Условное обозначение и таблица истинности дешифратора приведены в табл. 3.4.2.
87

Таблица 3.4.1
Условное обозначение и таблица истинности шифратора
Условное обозначение |
«1» на |
|
Выходы |
|
||
шифратора |
входе |
1 |
2 |
4 |
8 |
|
|
|
0 |
0 |
0 |
0 |
0 |
СибАДИ |
||||||
0 |
CD |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
2 |
0 |
0 |
1 |
0 |
2 |
3 |
0 |
0 |
1 |
1 |
|
3 |
2 |
|||||
4 |
4 |
4 |
0 |
1 |
0 |
0 |
5 |
5 |
0 |
1 |
0 |
1 |
|
6 |
8 |
6 |
0 |
1 |
1 |
0 |
7 |
|
7 |
0 |
1 |
1 |
1 |
8 |
|
|||||
9 |
|
8 |
1 |
0 |
0 |
0 |
|
|
9 |
1 |
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.4.2 |
|
Условное о означение |
та лица истинности дешифратора |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Условное обозначение |
|
|
Входы |
|
«1» на |
||||||||||
|
|
|
|
дешифратора |
|
1 |
2 |
4 |
8 |
выходе |
|||||
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
1 |
1 |
|
|
|
|
|
DC |
0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
0 |
1 |
0 |
2 |
||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
2 |
|
|
|
|
0 |
0 |
1 |
1 |
3 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
0 |
1 |
0 |
0 |
4 |
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
4 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
1 |
5 |
||||
|
|
4 |
|
5 |
|
|
|
|
|||||||
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
8 |
|
6 |
|
|
|
|
0 |
1 |
1 |
0 |
6 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||||||
|
|
7 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
0 |
1 |
1 |
1 |
7 |
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
8 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
8 |
||||
|
|
|
|
|
|
9 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
1 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дешифратор n-разрядного двоичного числа имеет 2n выходов. Различные типы дешифраторов применяются в схемах цифровой индикации информации. Особенно широко применяются дешифраторы, преобразующие информацию в код для семисегментных индикаторов.
88
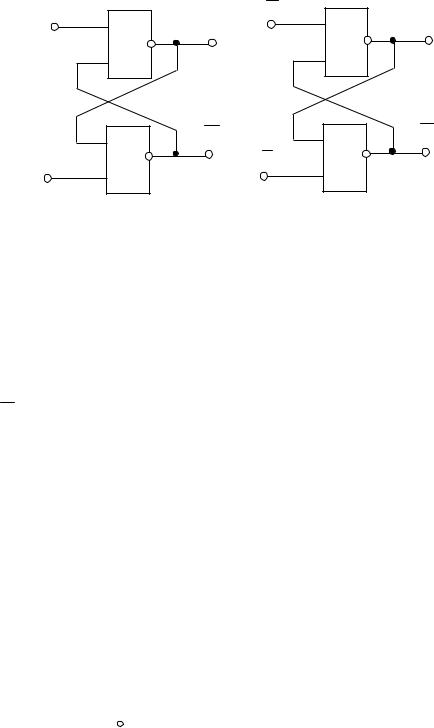
RS-триггер. Простейший RS-триггер можно реализовать на логических элементах ИЛИ-НЕ и И-НЕ, как показано на рис. 3.4.1.
R |
Q |
R |
Q |
1 |
& |
||
СибАДИ |
|||
1 |
Q |
& |
Q |
S |
|
S |
|
а) |
|
б) |
|
Р с. 3.4.1. RS-триггер, реализованный на |
|
||
лог ческ х элементах ИЛИ-НЕ (а) и И-НЕ (б) |
|
||
Ас нхронный RS-триггер имеет два информационных входа: R и S. Входы S R названы по первым буквам английских слов set – установка и reset – с рос. При S=1 и R=0 на выходах триггера появляются сигналы: на прямом выходе Q=1, на инверсном Q =0. При S=0 и R=1 выходные сигналы триггера принимают противоположные состояния (Q=0; Q =1). Этот триггер не имеет тактового входа. Условное обозначение и таблица истинности RS-триггера приведены в табл. 3.4.3.
Таблица 3.4.3
Схемное обозначение
таблица истинности асинхронного RS-триггера
|
|
Схемное |
Входные |
|
Состояние |
|||||||
|
обозначение |
сигналы |
|
|
выхода |
|||||||
|
|
|
|
|
|
|
R |
|
S |
Q(t) |
|
Q(t+1) |
|
|
|
|
|
Q |
0 |
|
0 |
0 |
|
0 |
|
|
|
|
T |
|
|
|||||||
|
|
R |
|
|
0 |
|
0 |
1 |
|
1 |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Q |
0 |
|
1 |
0 |
|
1 |
|
|
|
S |
|
|
0 |
|
1 |
1 |
|
1 |
||
|
|
|
|
|
|
1 |
|
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1 |
|
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
1 |
0 |
|
Не |
|
|
|
|
|
|
|
1 |
|
1 |
1 |
|
определено |
89

RS-триггер не допускает одновременного наличия на входах ак- |
||||||
тивных сигналов S=1; R=1. В этом случае не выполняется условие его |
||||||
функционирования, поскольку на выходах Q и Q логические уровни |
||||||
перестают быть взаимно инверсными, состояние выхода оказывается |
||||||
неопределенным. Данные комбинации считаются запрещенными. |
||||||
Режим S=1; R=0 называют режимом записи 1, так как Q(t+1)=1; |
||||||
режим S=0 и R=1 – режимом записи 0, так как Q(t+1)=0; режим S=0; |
||||||
R=0 – реж мом хранен я информации, так как информация на выходе |
||||||
остается не зменной. |
|
|
|
|||
Временная д аграмма асинхронного RS-триггера изображена на |
||||||
рис. 3.4.2. |
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
t |
S |
|
|
|
|
|
|
Q |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
Рис. 3.4.2. Временная диаграмма |
|
||
|
|
|
асинхронного RS-триггера |
|
||
Синхронный RS-триггер отличается от асинхронного наличием |
||||||
входа С для синхронизирующих тактовых импульсов. Переключение |
||||||
этого триггера под действием сигналов на входах R и S происходит |
||||||
только при появлении высокого уровня на тактовом входе С, что хо- |
||||||
рошо видно на временной диаграмме. |
|
|
||||
Схемное |
обозначение |
временная |
диаграмма |
синхронного |
||
RS-триггера приведены на рис. 3.4.3. |
|
|
||||
СибАДИC |
||||||
|
R |
ТТ |
Q |
|
|
t |
|
S |
|
t |
|||
|
C |
|
|
|
||
|
|
Q |
R |
|
t |
|
|
S |
|
|
Q |
|
t |
Рис. 3.4.3. Схемное обозначение и временная диаграмма |
||||||
|
|
|
синхронного RS-триггера |
|
||
90
D-триггер. Условное обозначение и таблица истинности D- триггера приведены в табл. 3.4.4.
Таблица 3.4.4
хемное обозначение и таблица истинности D-триггера с потенциальным управлением
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СибАДИ |
|
|
||||||||||||
|
|
|
Схемное |
Входные |
Состояние |
|
|
|||||||
|
|
обозначен е |
сигналы |
выхода |
Примечание |
|
||||||||
|
|
|
|
|
|
|
|
|
С |
D |
Q(t) |
Q(t+1) |
|
|
|
|
|
D |
T |
Q |
0 |
0 |
0 |
0 |
Хранение |
|
|||
|
|
|
|
|
|
|
|
0 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
Q |
1 |
0 |
0 |
0 |
Запись «0» |
|
|||
|
|
|
C |
|
|
|
|
|
1 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
0 |
1 |
Запись «1» |
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
1 |
|
|
D-тр ггер (тр ггер задержки) – это устройство с двумя устойчивыми состояниями и двумя входами: информационным входом D переключения триггера в состояние, соответствующее логическому уровню на этом входе, и синхронизирующим входом С. Этот триггер может быть только синхронным. D-триггеры могут быть с потенциальным и динамическим управлением.
У D-триггеров с потенциальным управлением информация со входа D переписывается на выход Q в течение времени, при котором синхросигнал активен: =1. При пассивном синхросигнале триггер не чувствителен к изменениям информационного сигнала (рис. 3.4.4).
C 
t
D 
t
Q 
t
Рис. 3.4.4. Временная диаграмма D-триггера со статическим управлением
91

В триггерах с динамическим управлением информация записыва- |
||||
ется (передается на выход Q) по фронту или спаду сигнала синхрони- |
||||
зации на входе С. |
|
|
||
Временная диаграмма D-триггера с динамическим управлением |
||||
по спаду сигнала синхронизации приведена на рис. 3.4.5. |
||||
|
|
D |
|
|
D ТТ |
Q |
|
t |
|
C |
|
C |
|
|
|
Q |
|
||
|
|
|
||
|
|
|
t |
|
|
|
Q |
|
|
|
|
|
t |
|
Рис. 3.4.5. Схемное о означение и временная диаграмма D-триггера |
||||
с динамическим управлением по спаду сигнала синхронизации |
||||
|
|
Т-триггер. Т-триггер – это устройство с |
||
D ТТ |
Q |
двумя устойчивым |
состояниями и одним |
|
счетным (информационным) входом Т. Счёт- |
||||
C |
|
|||
|
ным он называется потому, что подсчитывает |
|||
|
Q |
количество импульсов, поступивших на его |
||
|
|
вход. |
|
|
Рис. 3.4.6. Т-триггер |
Триггер переключается каждый раз в про- |
|||
на базе D-триггера |
тивоположное состояние по фронту или по |
|||
|
|
спаду управляющего |
сигнала на входе Т. |
|
Т-триггер может быть выполнен на основе D-триггера с |
||||
динамическим управлением путем соединения инверсного выхода со |
||||
входом D (рис. 3.4.6). Счетный триггер из D-триггера с |
||||
СибАДИ |
||||
потенциальным управ-лением получить нельзя. |
||||
Т-триггеры используются при построении схем различных счёт- |
||||
чиков, поэтому в составе больших интегральных схем различного на- |
||||
значения обычно есть готовые модули этих триггеров. |
||||
Схемное обозначение Т-триггера, работающего по спаду синхро- |
||||
низирующего сигнала, и его временная диаграмма приведены на |
||||
рис. 3.4.7. |
|
|
|
|
|
|
92 |
|
|

|
|
|
T |
|
|
|
|
|
|
|
|
ТТ |
|
Q |
|
|
|
|
|
|
|
|
t |
|
|
Q |
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
Р с. 3.4.7. Схемное обозначение Т-триггера, работающего по спаду |
|||||||||||
|
с нхрон з рующего сигнала, и его временная диаграмма |
||||||||||
JK-тр ггер. |
Условное |
|
о означение |
и |
таблица |
истинности |
|||||
JK-триггера пр |
ведены в та л. 3.4.5. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.4.5 |
|
Схемное о означение и та лица истинности JK-триггера |
||||||||||
Схемное |
|
Входы |
|
Состояние |
|
|
|
|
|||
обозначение |
|
|
выходов |
|
|
Примечание |
|||||
|
|
|
|
|
|
||||||
|
|
|
|
K |
J |
Q(t) Q(t+1) |
|
|
|
|
|
S |
TT |
Q |
0 |
* |
* |
0 |
0 |
Режим хранения информации |
|||
0 |
* |
* |
1 |
1 |
|
|
|
|
|||
J |
|
|
1 |
0 |
0 |
0 |
0 |
Режим хранения информации |
|||
K |
|
|
1 |
0 |
0 |
1 |
1 |
|
|
|
|
|
|
1 |
0 |
1 |
0 |
1 |
|
|
|
|
|
C |
|
Q |
Режим установки единицы J=1 |
||||||||
|
|
1 |
0 |
1 |
1 |
1 |
|
|
|
|
|
R |
|
|
1 |
1 |
0 |
0 |
0 |
Режим записи нуля K=1 |
|||
|
|
|
1 |
1 |
0 |
1 |
0 |
||||
|
|
|
|
|
|
|
|||||
|
|
|
1 |
1 |
1 |
0 |
1 |
Счетный режим триггера J=K=1 |
|||
|
|
|
1 |
1 |
1 |
1 |
0 |
|
|
|
|
Примечания: 1. * – любое состояние входа. |
|
|
|
|
|||||||
|
|
2. Таблица справедлива при R=S=0. |
|
|
|||||||
СибАДИ |
|||||||||||
JK-триггер имеет два |
выхода: прямой Q и инверсный Q . |
||||||||||
JK-триггер имеет пять входов: R – асинхронный вход установки в со- |
|||||||||||
стояние 0 (Q=0); |
S – |
асинхронный |
вход |
установки |
в состояние |
||||||
1 (Q=1); К – синхронизируемый вход установки в состояние 0 (Q=0); |
|||||||||||
J – синхронизируемый вход установки в состояние 1 (Q=1); С – син- |
|||||||||||
хронизирующий вход. |
|
|
|
|
|
|
|
|
|||
93

Асинхронные входы R и S работают так же, как в RS-триггере, независимо от сигналов на остальных входах: режим S=1; R=0 – режим записи 1; режим S=0 и R=1 – режим записи 0; режим S=R=0 – режим хранения информации. Не допускается одновременное наличие на входах R и S активных сигналов S=R=1.
При S=R=0 логика работы входов J, K и C такова: если на входе СJ логическаяи1, абАДИна входе K – логический 0, то по спаду синхроимпульса на входе C тр ггер установится в состояние 1. Если на входе J – лог ческ й 0, а на входе K – логическая 1, то по спаду синхроимпульса на входе C тр ггер установится в состояние 0. В случае, когда и на входах J K лог ческие нули, то независимо от сигнала на входе C состоян е тр ггера не меняется. И последний режим работы, когда на входах J K лог ческие единицы, JK-триггер работает в режиме делителя частоты с гнала на входе С. Это означает, что по заднему фронту каждого тактового импульса состояние триггера меняется на
противоположное.
Из табл. 3.4.5 ст нности JK-триггера видно, что при J=1 и K=0 триггер по тактовому мпульсу устанавливается в состояние 1 (Q=1). При J=0 и К=1 триггер по тактовому импульсу устанавливается в состояние 0 (Q=0); при J=K=0 триггер хранит ранее принятую информацию независимо от сигнала на синхронизирующем входе С; при J=K=1 состояние выхода Q триггера с каждым импульсом на синхронизирующем входе изменяется на противоположное. Триггер становится делителем частоты на 2.
C
t
J
t
K
t
Q
t
Q
t
Рис. 3.4.8. Временная диаграмма JK-триггера при R=S=0
94

На рис. 3.4.8 приведена временная диаграмма JK-триггера, иллю- |
||||
стрирующая переключение триггера по спаду синхронизирующего |
||||
сигнала в зависимости от состояния входов J и K. |
||||
четчики. На рис. 3.4.9 приведены условное обозначение четы- |
||||
рехразрядного двоичного счетчика и его временная диаграмма. |
||||
Т2 |
1 |
C |
|
|
|
|
|||
D0 |
|
t |
||
D1 |
2 |
1 |
||
D2 |
4 |
2 |
t |
|
D3 |
8 |
|||
|
||||
V |
|
4 |
t |
|
C |
|
|||
|
|
|||
|
|
|
||
R |
|
8 |
t |
|
PI |
Р |
|
||
|
t |
|||
а |
|
|
||
|
|
б |
||
Рис. 3.4.9. Условное о означение четырехразрядного двоичного счетчика (а) |
||||
|
|
и его временная диаграмма (б) |
||
Входы D0–D3 |
называются информационными входами и служат |
|||
для записи в счетчик какого-либо двоичного состояния. Это состоя- |
||||
ние отобразится на его выходах и от него будет производиться начало |
||||
отсчета. Другими словами, это входы предварительной установки. |
||||
Вход V разрешения предустановки служит для разрешения записи ко- |
||||
да по входам D0–D3. Предварительная запись в счетчик производится |
||||
при подаче сигнала разрешения записи на вход V в момент прихода |
||||
импульса на тактовый (счетный) вход |
. Знак «\» на входе С означает, |
|||
что счетчик срабатывает по спаду импульса. Знак «/» на входе С оз- |
||||
начает, что счетчик срабатывает по фронту импульса. |
||||
Вход R служит для обнуления счетчика, т. е. при подаче импуль- |
||||
СибАДИса на этот вход на всех выходах счетчика устанавливается логический |
||||
ноль. Вход PI называется входом переноса. Выход P называется вы- |
||||
ходом переноса. На этом выходе формируется сигнал при переполне- |
||||
нии счетчика (когда на всех выходах устанавливаются логические |
||||
единицы). Этот сигнал обычно подается на вход переноса следующе- |
||||
го счетчика. На выходах 1,2,4,8 формируется двоичный код, соответ- |
||||
ствующий числу поступивших на вход счетчика импульсов. Как вид- |
||||
95