

Результаты сравнения значений логарифмических декрементов колебаний:
|
Конструктивный |
Теоретическое значение |
Экспериментальное значе- |
||
|
элемент |
(рекомендованное СНиП 2.01.07-85*) |
ние |
||
|
|
|
|
Метод 3 |
Расхождение, |
|
|
|
|
|
% |
|
|
СИБАДИ |
|
||
|
Консольная балка |
0,15 |
|
|
|
|
VIII. Вывод по работе |
|
|
||
|
Студент |
|
ата |
||
|
Преподаватель |
ата |
|||
|
|
|
Контрольные вопросы |
||
1. |
В чем заключается физический смысл термина «колебательный |
||||
|
процесс» для строительных конструкций? |
|
|
||
2. |
Чем отличается линейная частота колебаний от угловой? |
||||
3. |
Что такое частота колебаний? |
|
|
||
4. |
Что такое амплитуда колебаний? |
|
|
||
5. |
Что называется логарифмическим декрементом колебаний и что |
||||
|
он характеризует? |
|
|
||
6. |
Какие колебания называются гармоническими? |
||||
7. |
Что называется периодом колебаний и какова его связь с часто- |
||||
|
той колебаний? |
|
|
|
|
8. |
Какие строительные конструкции можно моделировать как сис- |
||||
|
темы с одной степенью свободы? |
|
|
||
9. |
Как теоретически определяется частота собственных колебаний |
||||
для систем с одной степенью свободы?
10. Как частота собственных колебаний зависит от жесткости колеблющейся системы?
11. Как частота собственных колебаний зависит от величины массы системы?
12. Зависит ли логарифмический декремент колебаний от массы системы?
13. Зависит ли логарифмический декремент колебаний от первоначальной амплитуды колебаний системы?
42
Лабораторная работа №4
ИССЛЕДОВАНИЕ СОБСТВЕННЫХ ИЗГИБНЫХ КОЛЕБАНИЙ ОСНОВНОГО ТОНА КОНСОЛЬНОЙ БАЛКИ
С РАСПРЕДЕЛЕННОЙ МАССОЙ
4.1.Краткие теоретические сведения
СИБАДИсистем при малых колебаниях, где значение частоты собственных колебаний не зависит от величины амплитуды и диссипативных свойств систе-
Система с распределенной массой имеет количество степеней свободы, равное бесконечности. В этом случае возникает бесконечное число форм (тонов) собственных колебаний с соответствующими частотами. Динамическая модель в виде системы с распределенной массой наиболее точно описывает динамическое поведение реальной конструкции. Однако
в связи со сложностью математического аппарата для данной модели
(здесь приходится использовать дифференциальные уравнения в частных производных) ее применение для сложных конструктивных схем крайне затруднительно.
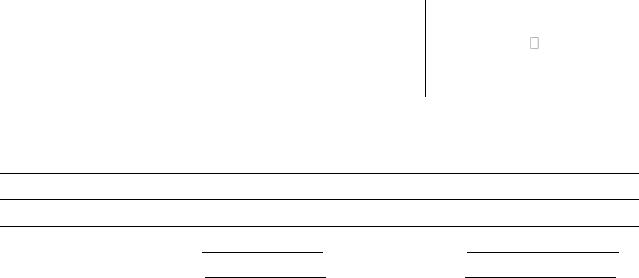
Простейшим случаем системы с распределенной массой является
консольная балка постоянного сечения, имеющая погонную |
массу m |
(рис. 4.1). |
|
Рис. 4.1. Динамическая модель консольной балки |
|
Погонная масса m может быть определена как |
(4.1) |
m A , |
|
где А – площадь поперечного сечения балки; – плотность материала |
|
балки (для стали =7850 кг/м3).
Дифференциальное уравнение собственных незатухающих изгиб-
ных колебаний при любых граничных условиях имеет вид |
|
||||||
4 y z,t |
|
m |
|
2 y z,t |
0. |
(4.2) |
|
z4 |
EI x |
t |
|||||
|
|
|
|
||||
Применение уравнения (4.2) возможно лишь в случае «линейных» |
|||||||
43
мы, а также при небольшой погонной жесткости балки, когда влияние сил инерции сдвига и поворота поперечных сечений незначительно.
Уравнение изогнутой оси балки, полученное путем решения уравнения (4.2), для произвольной n-й формы может быть сначала представле-
но в виде |
|
yn z Achkn z Bshkn z C cos kn z D sin kn z, |
(4.3) |
где A, B, C, D – постоянные, зависящие от граничных условий балки; kn – волновые числа, определяемые решением частотного уравнения.
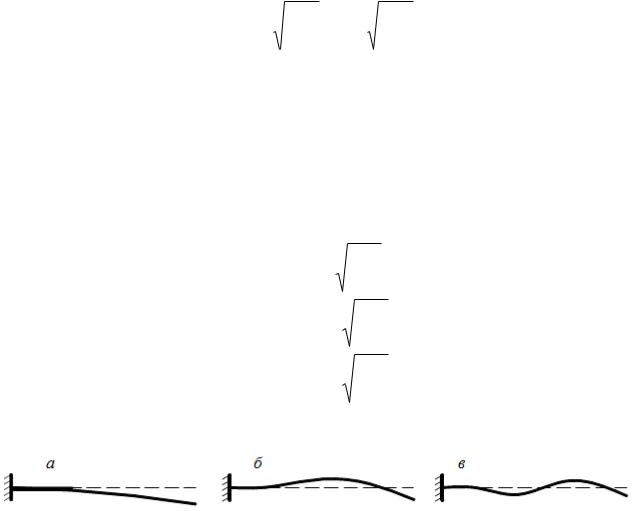
СИБАДИРис. 4.2. хемы форм собственных колебаний консольной балки с распределенной массой: а – схема первой формы колебаний; б – схема второй формы колебаний;
Частоты собственных колебаний данной консольной балки опреде-
ляются по формуле |
|
|
|
|
|
|
|
|
fn |
kn2 |
|
EI x |
|
2n |
EI x |
, |
(4.4) |
2 |
|
|
L2 |
|
||||
|
|
m |
|
m |
|
|||
где EIx – изгибная жесткость балки; L – длина консоли; m – погон-
ная масса; n – порядковый номер формы колебаний; n – собственные
числа, n kn L .
Для «нижней» зоны частотного спектра собственные числа для консольной балки с распределенной массой (рис. 4.2) соответственно рав-
ны: 1 =1,875; 2 =4,694; 3 =7,855. Тогда частоты колебаний первого, вто-
рого и третьего тонов для данной балки определятся:
f |
3,516 |
EI x ; |
|
|
||||
1 |
|
L2 |
|
m |
|
|
|
|
|
|
|
|
|
||||
f2 |
|
22,034 |
|
EI x |
; |
(4.5) |
||
L2 |
|
m |
||||||
|
|
|
|
|
||||
f3 |
|
67,701 |
|
EI x . |
|
|||
|
|
L2 |
|
m |
|
|
|
|
Схемы форм «нижних» порядков собственных изгибных колебаний |
||||||||
приведены на рис. 4.2. |
|
|
|
|
|
|
|
|
в – схема третьей формы колебаний
В инженерной практике для динамического анализа строительных конструкций чаще используют только формы колебаний с несколькими низшими частотами (особенно первую). В последнем случае в целях упрощения динамической модели используют приближенный метод приве-
44

дения масс, например метод Релея. Он состоит в замене системы со многими или бесконечным количеством степеней свободы системой с одной степенью свободы с приведенной массой Mпр в заданной точке сооружения.
Приведенной массой Mпр называется такая сосредоточенная масса, для которой полученная система с одной степенью свободы динамически
эквивалентна системе со многими или бесконечным количеством степеней свободы. Условие эквивалентности выбирается (по методу Релея) в форме равенства кинетических энергий, что приводит к равенству частот основного тона изгибных колебаний.
СИБАДИгде y(z) – уравнение деформированной оси балки, удовлетворяющее граничным условиям; а – координата приложения приведенной массы; y(а) – перемещение в месте приложения приведенной массы.
Mпр вычисляется по формуле
|
m |
L |
z dz, |
|
|
M пр |
y2 |
(4.6) |
|||
|
|||||
|
y2 a 0 |
|
|
||
Так, для случая консольной балки с распределенной массой может быть получена приближенная динамическая модель (рис. 4.3) с приведенной массой Mпр, приложенной на консоли (a=L). Такая модель имеет одну степень свободы.
Рис. 4.3. Динамическая модель консольной балки с приведенной массой
Значение приведенной массы для данного случая определится зависимостью (4.6) и составит M пр 0,244mL.
Недостатком приближенных моделей с одной степенью свободы (рис. 4.3) является возможность при их использовании получения и анализа лишь первой частоты собственных колебаний, остальные частоты спектра игнорируются. Поэтому для приближенных расчетов систем с распределенными массами в инженерной практике широко распространены методы приведения таких систем к системам с конечным количеством масс. Так, при использовании современных программных комплексов SCAD, «Лира» и т.п., позволяющих производить динамические расчеты систем с
45