

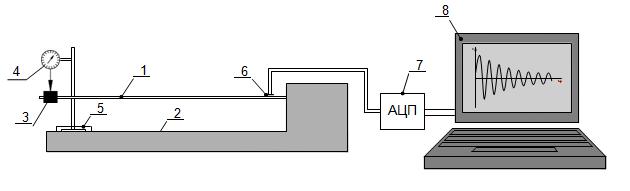
размещаемых в указанной точке на балке. Для определения в необходимой точке балки статического прогиба используется индикатор часового типа (прогибомер) 4 на передвижном штативе 5.
Изгибные деформации при совершении колебаний фиксируются пьезоэлектрическим датчиком 6, преобразующим механические и статические колебательные деформации в электрические сигналы. Электрические сигналы преобразуются в числовые значения путем их обработки СИБАДИаналого-цифровым преобразователем АЦП-к2 («оцифровка» сигнала) 7. В качестве АЦП в настоящей работе использована звуковая плата персонального компьютера. Полученные цифровые аналоги показаний датчика могут быть обработаны при помощи персонального компьютера 8 и рас-
печатаны на принтере.
Рис. 3.3. Схема установки для проведения испытаний
3.3. Порядок проведения работы и обработка результатов испытаний
В зависимости от целей испытания и скорости протекания колебательных процессов для определения их характеристик могут быть применены методы различной сложности. В данной лабораторной работе предусматривается применение трех методов.
Метод №1 (при помощи секундомера) предполагает возможность визуального исследования свободных колебаний элементов конструкций с относительно низкими значениями частот (1 – 2 Гц).
В этом случае частота может быть определена с помощью секундо-
мера.
1. Порядок проведения работы:
а) установить в указанной точке на балке массу М; б) вызвать свободные колебания балки;
в) при помощи секундомера засечь время t, за которое груз совер-
34

шит некоторое число полных циклов колебаний N (не менее 10 колебаний). Рекомендуется отсчет вести вслух и, начиная с нуля, включать секундомер, на N-й отсчет – выключать.
2. Обработка результатов опыта:
а) определить частоту свободных колебаний f по формуле
f Nt .
СИБАДИгде g=9,81 м/с2 – ускорение свободного падения.
Метод №2 (при помощи индикатора часового типа путем изме-
рения статического прогиба). Предполагается, что известна величина податливости 11 – перемещения массы М от действия единичной нагруз-
ки, приложенной в точке расположения массы М по направлению возможных колебаний. В этом случае частота может быть вычислена по формуле (3.3) или в частном случае по формуле (3.4). (Обработка данных в методе №2 позволяет, как и в методе №1, определить лишь значение частоты собственных колебаний.)
1. Порядок проведения работы:
а) установить индикатор часового типа в указанной точке закрепле-
ния массы М с целью измерения статического перемещения массы по направлению ее колебаний. Снять отсчет по индикатору;
б) установить в этой же точке на балке массу М. Снять новый от-
счет по индикатору;
в) определить значение статического прогиба Уст по разности от-
счетов. |
|
|
|
|
|
2. |
Обработка результатов опыта: |
||||
а) Определить значение частоты собственных колебаний по форму- |
|||||
ле |
f |
1 |
|
g |
, |
2 |
|
||||
|
|
Уст |
|||
Метод №3 (с использованием современных датчиков и компьютерных систем) основан на обработке зарегистрированной динамической реакции конструкции в виде виброграммы, полученной при помощи:
– первичного преобразователя – вибродатчика (пьезоэлектрического элемента, преобразующего деформации в электрические сигналы);
– аналогово-преобразовательного устройства, позволяющего непрерывные электрические сигналы превратить в цифры;
– регистрирующей системы, которая записывает процесс колеба-
ний.
Полученные данные могут быть обработаны при помощи ПК и напечатаны в удобном для анализа виде.
1. Порядок проведения работы:
35
а) настроить ПК, запустив соответствующую программу для регистрации процесса колебаний;
б) установить в указанной точке на балке массу М; в) вызвать свободные колебания балки;
г) настроить параметры усиления (ослабления) сигнала при колебаниях путем регулировки параметров АЦП (величины мощности входного сигнала звуковой платы ПК);
СИБАДИд) записать процесс «шума», при котором колебания отсутствуют с целью определения уровня «шума» – максимальных значений амплитуд виброграммы при неподвижной конструкции;
е) записать виброграмму процесса колебаний в интервале не более 30 – 40 с времени с сохранением результатов и распечаткой виброграмм собственных колебаний и «шума» на принтере.
2. Обработка результатов опыта:
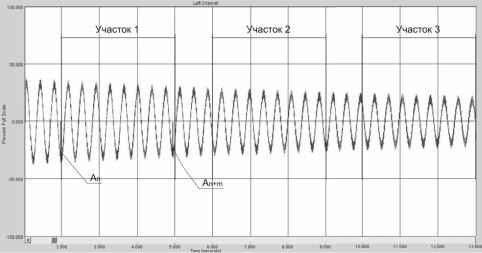
а) на полученной виброграмме (рис. 3.4) выделить 3 – 4 участка хорошего качества для обработки, каждый из которых имеет определенный фиксированный временной интервал ti (например, t1= t2= t3=3 с, как на рис. 3.4);
Рис. 3.4. Фрагмент виброграммы колебаний
б) подсчитать количество Ni периодов колебаний в заданном промежутке времени на каждом участке и установить, примерно с какой точностью это сделано. Обрабатывать следует только низкочастотные колебания, имеющие амплитуду, существенно отличающуюся от «шума».
(В данной лабораторной работе рекомендуется при «ручном» подсчете точность определения количества периодов N принимать не ниже
¼ периода.); в) определить частоту колебаний на каждом участке по формуле
36

fi Ni ; Ti
г) определить частоту колебаний балки как среднее арифметическое значение частот на каждом участке по формуле
|
|
|
|
k |
|
|
|
|
|
|
|
fi |
|
||
СИБАДИ |
|||||||
|
f |
|
i 1 |
, |
|
||
|
|
|
|
k |
|
|
|
где k – количество участков, принятых на виброграмме. |
|||||||
В некоторых |
нелинейных |
системах эти частоты переменны: на- |
|||||
пример, в упругонелинейных системах |
жесткого типа частота уменьша- |
||||||
ется с уменьшением амплитуды; |
|
|
|
|
|
|
|
д) определить логарифмический декремент колебаний на каждом |
|||||||
участке по формуле |
|
1 |
|
|
|
|
|
|
i |
|
ln |
|
|
, |
|
|
|
m An m |
|
||||
где An – амплитуда |
колебаний |
первого |
цикла колебаний на участке |
||||
(см.рис. 3.4); An+m – |
амплитуда колебаний последнего цикла колебаний |
||||||
на участке; m – количество полных циклов колебаний между принятыми амплитудами;
е) определить логарифмический декремент колебаний балки как среднее арифметическое значение декрементов на каждом участке по формуле
k
ii 1k ,
где k – количество участков, принятых на виброграмме.
3.4. Оценка результатов работы
После получения данных по результатам испытаний сделать выво-
ды:
а) вычислить по формуле (3.5) теоретическое значение частоты собственных колебаний для консольной балки с сосредоточенной массой
(при M >> mL);
б) оценить и объяснить причины процентного расхождения опытных и теоретических значений собственных частот и логарифмических декрементов колебаний. В качестве теоретического значения логарифмического декремента колебаний для данной системы можно условно при-
37
нять т 0,15, что рекомендуется в нормативной литературе для сталь-
ных конструкций и сооружений; в) дать общую оценку результатов работы.
Примерная форма выполнения отчета лабораторной работы №3
Исследование собственных изгибных колебаний основного тона консольной балки с сосредоточенной массой
Студент группы Цель работы – экспериментальное определение некоторых динами-
ческих характеристик свободных колебаний консольной балки с одной степенью свободы.
I. Установка. Консольная балка.
II. Приборы. Пьезоэлектрический датчик, индикатор часового типа, секундомер, набор грузов, персональный компьютер, принтер.
III. Испытуемый образец. Стальная полоса с размерами поперечного сечения b h 4 0,3см. Длина полосы 1 м, материал – сталь С235 с
модулем упругости E 2,06 1011Па.
|
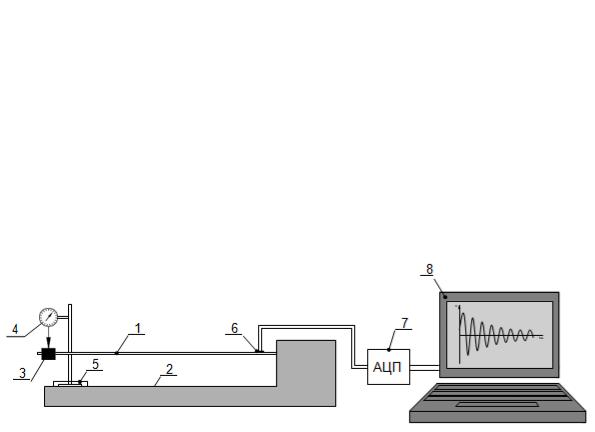
IV. Схема установки и наименование основных узлов. |
|
|
Схема установки для испытаний: |
|
1. |
Консольная балка массой mL. |
2. Массивная станина. |
3. |
Груз массой M >> mL. |
4. Индикатор часового типа. |
5. |
Штатив индикатора часового типа. |
6. Пьезоэлектрический датчик. |
7.Аналого-цифровой преобразователь. |
8. Персональный компьютер. |
|
|
V. Порядок проведения испытаний. |
|
|
Метод №1: |
|
|
а) установить в указанной точке на балке массу М; |
|
СИБАДИ |
||
|
б) вызвать свободные колебания балки; |
|
в) при помощи секундомера засечь время t, за которое груз совер-
38
шит некоторое число полных циклов колебаний N (не менее 10 колебаний). Рекомендуется отсчет вести вслух и, начиная с нуля, включать секундомер, на N-й отсчет – выключать;
г) опыт повторить 3 раза и результат вычислить по среднему значению из трех опытов.
Результаты отсчетов заносятся в таблицу:
|
|
|
|
|
|
|||
СИБАДИ(с=0,01 мм цена деления шкалы индикатора) У с (м). |
||||||||
|
№ |
Время |
Число колебаний |
|
Частота колебаний |
|||
|
опыта |
ti, с |
Ni |
|
|
f Ni |
, Гц |
|
|
|
|
|
|
|
i |
tt |
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
– |
– |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
fi |
|
|
|
|
Частота собственных колебаний |
f |
i 1 |
|
|
(Гц). |
||
|
|
|
|
3 |
|
|
|
|
Метод №2:
а) установить индикатор часового типа в точке приложения груза. Снять отсчет по индикатору;
б) установить в указанной точке на балке массу М. Снять новый отсчет по индикатору;
в) определить значение статического прогиба по разности отсчетов; г) опыт повторить 3 раза и результат вычислить по среднему значе-
нию из трех опытов.
Результаты отсчетов заносятся в таблицу:
№ |
Отсчет по индика- |
Отсчет по инди- |
|
Разность отсчетов |
|||
опыта |
тору без груза |
катору с грузом |
|
∆i |
|||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
– |
– |
|
|
|
|
|
|
|
3 |
i |
|
|||
|
|
|
|
|
|||
редняя разность отсчетов |
|
i 1 |
|
|
(делений). |
||
3
Статический прогиб в точке приложения груза
ст
39

Частота собственных колебаний |
f |
1 |
|
g |
|
(Гц). |
2 |
|
|||||
|
|
Уст |
|
|||
Метод №3: |
|
|
|
|
|
|
а) установить в указанной точке на балке массу М; |
|
|||||
б) вызвать свободные колебания балки; |
|
|
|
|
|
|
СИБАДИ |
||||||
в) настроить параметры усиления (ослабления) сигнала при колебаниях путем регулировки параметров величины мощности входного сигнала звуковой платы ПК;
г) записать процесс «шума», при котором колебания отсутствуют с целью определения уровня «шума» – максимальных значений амплитуд виброграммы при неподвижной конструкции;
д) записать виброграмму процесса колебаний с сохранением результатов и распечаткой виброграмм собственных колебаний и «шума» на принтере;
е) на полученной виброграмме выделить 3 участка для обработки, каждый из которых имеет определенный фиксированный временной ин-
тервал ti ;
ж) подсчитать количество N периодов колебаний в заданном промежутке времени на каждом участке;
з) определить частоту колебаний на каждом участке;
и) определить амплитуду колебаний первого цикла колебаний An на участке и амплитуду колебаний последнего цикла колебаний An+m на участке, а также m – количество полных циклов колебаний между принятыми амплитудами;
к) определить логарифмический декремент колебаний на каждом участке;
л) итоговые значения частоты и логарифмического декремента колебаний получить как среднее значение из трех участков.
Результаты отсчетов заносятся в таблицу:
№ |
Время |
Число ко- |
Частота |
|
Ампли- |
Амплитуда |
Число пе- |
Логарифм. декре- |
|||||||
уч-ка |
ti, с |
лебаний |
колебаний |
туда од- |
последн. |
мент колебаний |
|||||||||
|
|
Ni |
fi |
Ni |
, |
ного цик- |
цикла коле- |
риодов |
|
1 |
|
A |
|||
|
|
между Аn |
i |
ln |
|||||||||||
|
|
|
|
|
ла коле- |
баний А , |
|
|
n |
|
|||||
|
|
|
|
ti |
|
баний Аn, |
n+m |
и Аn+m, |
|
m |
|
A |
n m |
||
|
|
|
Гц |
|
мм |
m |
|
|
|
|
|||||
|
|
|
|
мм |
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
– |
|
|
|
|
– |
– |
– |
|
|
|
|
|
|
40
|
3 |
|
|
|
|
|
|
|
fi |
|
|
|
|
Частота собственных колебаний |
f |
i 1 |
|
|
(Гц). |
|
|
|
|
||||
|
3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
i |
|
|
Логарифмический декремент колебаний |
|
|
i 1 |
|
. |
|
|
|
|||||
|
|
|
|
3 |
|
|
СИБАДИ |
||||||
VI. Определение теоретического значения частоты собственных колебаний.
Теоретическое значение частоты собственных колебаний консольной балки с сосредоточенной массой определяется приближенно (при
M >> mL) по формуле f |
|
1 |
|
|
3EI |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Mx3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b h3 |
|
|
|
4 |
||||
Определяем момент инерции сечения балки |
I |
|
|
|
|
|
|
(м ). |
||||||||||||||
|
12 |
|
|
|
||||||||||||||||||
Вычисляем частоту собственных колебаний |
f |
|
1 |
|
|
3EI |
|
(Гц). |
||||||||||||||
|
2 |
Mx3 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
VI. Результаты сравнения опытных и теоретических данных. |
|
|
||||||||||||||||||||
Результаты сравнения значений частот собственных колебаний: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Конструк- |
о- |
Координата |
Теоретич. |
|
|
Экспериментальное значение частоты |
||||||||||||||||
тивный |
сред. |
положения |
значение |
|
|
|
|
|
f, Гц |
|
|
|
|
|
||||||||
элемент |
масса |
массы |
частоты |
|
|
|
|
|
|
|
||||||||||||
|
Метод |
Рас- |
Метод |
Рас- |
Метод |
Рас- |
||||||||||||||||
|
М, кг |
x1, м |
|
f, Гц |
|
|
1 |
хожд., |
|
2 |
|
хожд., |
|
3 |
|
хожд., |
||||||
|
|
|
|
|
|
|
|
|
|
|
% |
|
|
|
% |
|
|
|
|
% |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Консоль- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ная балка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
41