

1582
.pdfНа правах рукописи
ИГНАТОВ СЕРГЕЙ ДМИТРИЕВИЧ
СИСТЕМА АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРАКОВ ГУСЕНИЧНОЙ ЛЕНТЫ ЦЕПНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА
Специальность 05.13.12 – Системы автоматизации проектирования
(промышленность)
АВТОРЕФЕРАТ диссертации на соискание ученой степени
кандидата технических наук
Омск – 2012

Работа выполнена в ФГБОУ ВПО «Сибирская государственная автомобильнодорожная академия (СибАДИ)»
Научный руководитель: кандидат технических наук, доцент Сухарев Роман Юрьевич, доцент кафедры «Автоматизация
производственных процессов и электротехника» ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Официальные оппоненты: доктор технических наук, доцент Мещеряков Виталий Александрович заведующий кафедрой «Математики и
информатики» филиала Всероссийского заочного финансово-экономического института в г. Омске
кандидат технических наук, доцент Глушец Виталий Алексеевич,
Заместитель директора по учебной работе ФГБОУ ВПО «Новосибирская государственная академия водного транспорта» Омский институт водного транспорта (филиал)
Ведущая организация: ФГБОУ ВПО Омский государственный аграрный университет им. П.А. Столыпина, г. Омск
Защита диссертации состоится 28 мая 2012 г. в 1630 ч. на заседании объединенного диссертационного совета ДМ 212.250.03 при ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)» по адресу: 644080, г. Омск, пр. Мира, 5, зал заседаний.
С диссертацией можно ознакомиться в библиотеке ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)» по адресу: 644080, г. Омск, пр. Мира, 5.
Отзывы на автореферат направлять |
по адресу: 644080, г. Омск, |
пр. Мира 5, тел., факс: (3812) 65-03-23, e-mail: arkhipenko_m@sibadi.org |
|
Автореферат разослан 25 апреля 2012 г. |
|
Ученый секретарь объединенного |
|
диссертационного совета ДМ 212.250.03, |
|
кандидат технических наук |
М. Ю. Архипенко |
3
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Совершенствование процессов проектирования и технологической подготовки промышленного производства землеройных машин (ЗМ) можно осуществить только за счет широкого использования средств вычислительной техники и информационных технологий, т.е. за счет использования систем автоматизации проектирования (САПР).
В настоящее время наблюдается активная интеграция САПР в общую архитектуру проектно-производственной среды промышленных предприятий.
Современные САПР используются для построения и функционирования интегрированных интерактивных комплексов анализа и синтеза проектных решений и систем создания конструкторской, технологической и иной документации, для автоматизации конструкторских и технологических работ и применяются для сквозного автоматизированного проектирования, технологической подготовки, анализа и изготовления изделий в промышленности.
Создание САПР основных геометрических параметров траков гусеничной ленты (ГЛ) цепных траншейных экскаваторов (ЦТЭ) значительно сократит финансовые и временные затраты на их проектирование, а оптимальные геометрические параметры траков повысят эффективность ЦТЭ при разработке траншей, особенно в условиях поперечного крена.
Таким образом, проблема автоматизации проектирования основных геометрических параметров траков ГЛ ЦТЭ на основе современных компьютерных технологий является весьма актуальной.
Целью диссертационной работы является разработка САПР основных геометрических параметров траков ГЛ ЦТЭ.
Для достижения поставленной цели были решены следующие задачи:
обоснован критерий эффективности РП ЦТЭ с гусеничным движителем;
разработана математическая модель сложной динамической системы рабочего процесса (РП) ЦТЭ;
выявлены основные закономерности, устанавливающие связь геометрических параметров траков ГЛ и критерия эффективности РП ЦТЭ;
разработана САПР основных геометрических параметров траков ГЛ ЦТЭ. Объектом исследования настоящей работы является процесс
автоматизации проектирования основных геометрических параметров траков ГЛ ЦТЭ.
Предметом исследования являются закономерности процесса автоматизации проектирования основных конструктивных параметров ГЛ ЦТЭ.
Методы исследования. В работе использованы методология системного анализа, методы математического моделирования, математического анализа, прикладной математики, теории алгоритмов.
Научная новизна работы заключается в следующем:
уточнена математическая модель процесса буксования гусеничного движителя, учитывающая как прямолинейное перемещение машины, так и ее боковой увод;
4
разработана математическая модель сложной динамической системы РП ЦТЭ, включающая в себя подсистемы: «Грунт», «ЦТЭ»;
установлены функциональные зависимости, отражающие связь критерия эффективности и основных геометрических параметров траков ГЛ ЦТЭ;
предложен алгоритм системы автоматизации проектирования основных геометрических параметров траков ГЛ ЦТЭ.
Практическая ценность работы состоит в инженерной методике автоматизации проектирования и программном продукте для оптимизации основных геометрических параметров траков ГЛ ЦТЭ в автоматизированном режиме. Инженерная методика и САПР внедрены на предприятии и в учебный процесс для курсового и дипломного проектирования.
Апробация результатов работы. Основные результаты работы докладывались на 70-й научно-технической конференции (Омск 2010); Международных научно-инновационных конференциях студентов, аспирантов
имолодых ученых с элементами научной школы «Теоретические знания – в практические дела» (Омск 2010, 2011); Всероссийских научно-практических конференциях студентов, аспирантов и молодых ученых «Развитие дорожнотранспортного комплекса и строительной инфраструктуры на основе рационального природопользования» (Омск 2010, 2011, 2012); Всероссийской научно-технической конференции «Актуальные вопросы строительства» (Новосибирск 2012); на заседаниях и научных семинарах кафедры «Автоматизация производственных процессов и электротехника» Сибирской государственной автомобильно-дорожной академии.
Публикации. По результатам работы опубликовано 10 печатных работ, в том числе 2 статьи в изданиях, рекомендованных ВАК.
Внедрение результатов работы. САПР основных геометрических параметров траков ГЛ ЦТЭ внедрена в ОАО «Конструкторское бюро транспортного машиностроения» г. Омска.
Структура и содержание работы. Диссертационная работа состоит из введения, пяти глав с выводами, списка использованных источников, включающего 118 наименований, и приложений на 3 страницах. Работа изложена на 165 страницах в целом, содержит 9 таблиц и 81 рисунок.
СОДЕРЖАНИЕ РАБОТЫ
Во введении сформулирована научная проблема, обоснована актуальность диссертационного исследования.
В первой главе диссертационной работы проведен анализ факторов, влияющих на курсовую устойчивость гусеничных машин при перемещении с поперечным креном.
Рассмотрены основные тенденции развития ЦТЭ. Проведен обзор существующих конструкций ГЛ и существующих систем автоматической корректировки траектории перемещения машин, а также анализ геометрических параметров траков ГЛ ЦТЭ. Проведенный анализ существующих САПР ЗМ
5
показал, что на сегодняшний день существующие САПР не позволяют оптимизировать значения геометрических параметров траков ГЛ ЦТЭ.
Проведен анализ работ, посвященных процессу взаимодействия гусеничного движителя с грунтом, а также повороту гусеничной машины, что позволило сформировать математическую модель «Грунт – Ходовое оборудование».
Разработана блок-схема сложной динамической системы рабочего процесса ЦТЭ, позволившая выявить основные факторы, влияющие на РП ЦТЭ. Проанализированы математические модели микрорельефа грунта и приведены уравнения корреляционных функций различных поверхностей, которые являются источником возмущающего воздействия на движитель ЦТЭ. При формировании математической модели микрорельефа опорной поверхности учтены сглаживающие характеристики гусеничного движителя.
Проведен анализ факторов, влияющих на качество РП ЦТЭ, и сформирован обобщенный критерий эффективности РП ЦТЭ
W (S |
Г |
, h ) |
Rпов(SГ , hШП ) |
|
K |
R |
|
ПСР |
(SГ , hШП ) |
K |
П |
, |
(1) |
|
|
|
|||||||||||
|
ШП |
Rпов* (SГ , hШП ) |
|
|
ПСР* |
(SГ , hШП ) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
где Rпов(SГ , hШП ), ПСР(SГ , hШП ) – значения целевых функций радиуса поворота и линейной скорости перемещения ЦТЭ, найденные без компромиссной
оптимизации, R* (S |
, h ), |
П* (S |
, h ) – наилучшие значения целевых функций, |
||
пов Г |
ШП |
СР Г |
ШП |
|
|
КП и КR – весовые коэффициенты при соответствующих целевых функциях, SГ – |
|||||
площадь опорной ветви гусеницы, hШП – высота шпор. |
|
|
|||
Обобщенная целевая функция |
|
|
|||
|
|
|
W (SГ ,hШП ) 1. |
|
(2) |
Граничные значения геометрических параметров траков ГЛ ЦТЭ |
|
||||
|
|
|
SГ min SГ SГ max ; |
|
(3) |
|
|
|
|
|
|
|
|
hШП min hШП hШП max . |
|
||
Сформулированы цель и задачи исследования.
Во второй главе обоснован комплексный метод выполнения работы, включающий как теоретические, так и экспериментальные исследования.
В данной работе при исследовании РП ЦТЭ применен системный анализ. Рабочий процесс машины представлен как сложная динамическая система, состоящая из отдельных подсистем, взаимосвязанных друг с другом. Математические модели подсистем образуют в совокупности динамическую модель РП ЦТЭ.
Основной задачей экспериментальных исследований являлось подтверждение адекватности математической модели рабочего процесса, в частности процесса буксования гусеничного движителя. Процесс подтверждения адекватности представлял следующую последовательность действий:
6
1.Проведение натурного эксперимента с целью получения массива экспериментальных данных;
2.Проведение машинного эксперимента при заданных значениях параметрах и условиях с целью получения теоретических данных;
3.Оценка адекватности математической модели путем сравнения экспериментальных и теоретических данных.
Обоснованы методы экспериментальных исследований, предусматривающие проведение как активных, так и пассивных экспериментов, методика статистической обработки результатов экспериментов.
С учетом принятой методики работы и результатов предшествующих исследований сформирована структура работы, соответствующая цели и задачам исследований.
В третьей главе была разработана обобщенная математическая модель РП ЦТЭ, включающая в себя математические модели таких подсистем, как: базовая машина; ходовое оборудование; гидропривод; двигатель внутреннего сгорания; силы реакции грунта на гусеничный движитель и на РО; процесс буксования гусеничного движителя; рельеф местности.
В процессе математического описания были приняты следующие допущения: влияния массы элементов подвески на перемещения остова не учитываются; катки имеют постоянный контакт с ГЛ; остов экскаватора и РО являются абсолютно жесткими; соединение РО и остова шарнирное, зафиксированное гидроцилиндром; инерционные свойства потока рабочей жидкости, в связи с их малостью, не учитываются; волновые процессы в элементах гидропривода, в связи с их незначительной длиной, не учитываются; объемный модуль упругости рабочей жидкости в период исследуемого процесса постоянен; потери давления по длине гидролинии определяются средними значениями расходов жидкости на входе и выходе гидролинии; сжимаемость жидкости в рабочих полостях гидронасоса и гидромотора не учитывается; утечки жидкости в гидроэлементах не учитываются; неравномерность расхода гидромотора не учитывается; неравномерность подачи гидронасоса не учитывается; силы инерции и момент сил инерции при повороте не учитываются ввиду малых скоростей перемещения; силы трения РО о стенки траншеи при повороте ввиду малых углов поворота не рассматриваются; сила веса, приходящаяся на гусеницу, равномерно распределена по опорной длине; радиус поворота ЦТЭ совпадает с поперечной осью гусеничного движителя.
Входными параметрами обобщенной математической модели рабочего процесса цепного траншейного экскаватора являются: заданные значения угла
поперечного крена макрорельефа αР, возмущающие воздействия на элементы ходового оборудования базовой машины со стороны микрорельефа. Выходными параметрами математической модели рабочего процесса ЦТЭ являются текущие
значения угла поперечного крена ЦТЭ αк, угловой скорости поворота ωпов и радиуса поворота Rпов, а также линейной скорости перемещения VД и производительность ПСР экскаватора. Для составления уравнений геометрических связей базовой
7
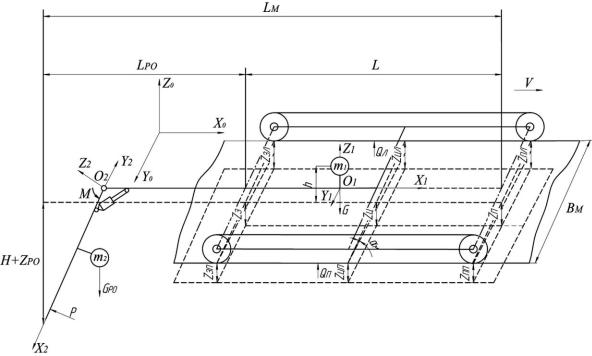
машины, рассмотрения перемещения РО в пространстве под действием различных факторов, определения динамических характеристик при различных возмущающих и управляющих воздействиях составлена упрощенная пространственная расчетная схема цепного траншейного экскаватора (рисунок 1).
Рисунок 1 – Упрощенная пространственная расчетная схема цепного траншейного экскаватора
На расчетной схеме использованы следующие обозначения: ZПП, ZПЛ - вертикальные координаты передних частей правой и левой гусениц; ZЗП, ZЗЛ – вертикальные координаты задних частей правой и левой гусениц; ZРО – изменение вертикальной координаты РО в инерциальной системе координат в результате воздействия неровностей микрорельефа; L – длина базы ЦТЭ; LМ – расстояние от оси ведущих звездочек до режущей кромки РО; LРО – расстоянии от оси ведомых звездочек до режущей кромки РО; ВМ – ширина базы машины; ZЦП, ZЦЛ – вертикальные координаты центров правой и левой гусениц; ZЦ – вертикальная координата центра машины; αМ – угол поперечного крена машины, вследствие воздействия микрорельефа; Н – величина заглубления РО; Р – сила реакции грунта на РО; G, GPO – силы веса базы ЦТЭ и РО соответственно; QП, QЛ – силы реакции грунта на правую и левую гусеницы; h – вертикальная координата центра тяжести ЦТЭ.
Используя расчетную схему экскаватора, были получены уравнения геометрических связей звеньев ЦТЭ, в частности
M arcsin |
ZЦП ZЦЛ |
. |
(4) |
||
|
|
||||
|
|
ВM |
|
||
ZРО |
ZЦ LРО |
. |
(5) |
||
|
|||||
|
|
0,5L |
|
||
8
В данной работе угол поперечного крена αК ЦТЭ формируется суммой угла поперечного крена макрорельефа αР и микрорельефа αМ. Угол αР определенного значения при моделировании формирует задатчик. Микрорельеф моделируется в соответствии с корреляционной функцией:
R(τ) = σ2 · e -α|τ| cos(βτ), |
(6) |
где – среднеквадратическое отклонение исходного микрорельефа; , – коэффициенты затухания и периодичности корреляционных функций; τ – дискретное время.
В связи с тем, что гусеничный движитель обладает сглаживающей способностью, микрорельеф был сглажен по площадке контакта гусеницы с микрорельефом.
Для описания взаимодействия гусеничного движителя с микрорельефом была использована методика Кузина Э.Н., при этом каждая гусеница рассматривается в качестве абсолютно жесткой балки.
Одной из важнейших подсистем сложной динамической системы ЦТЭ является электрогидравлический привод, осуществляющий перемещение машины в пространстве, а так же перемещение РО экскаватора относительно базовой машины и, соответственно, изменение глубины траншеи. В работе для математического описания гидропривода использовался метод многополюсников, базирующийся на представлении схем гидроприводов и их отдельных элементов в виде многомерных динамических объектов, динамические свойства которых характеризуются их матричными передаточными функциями.
Модель РП ЦТЭ позволяет определить основные силовые воздействия на двигатель внутреннего сгорания, являющийся первичным источником энергии для осуществления разработки грунта и перемещения машины. Двигатель в работе описан методом пространства состояний.
Математическая модель реакции грунта на рабочий орган цепного траншейного экскаватора в соответствии с теорией Федорова – Бондаровича представлена как сумма двух составляющих: низкочастотной (тренда) и высокочастотной (флюктуации):
F = FTР +FФ, |
(7) |
где F – сила реакции разрабатываемого грунта на РО; FТР – низкочастотная составляющая силы реакции (тренд); FФ – высокочастотная составляющая силы реакции (флюктуация). Корреляционные функции флюктуаций при резании грунтов аппроксимируются выражением
RФ ( ) Ф2 е Ф |
|
К |
|
cos( Ф K ) , |
(8) |
|
|
||||
|
|
где αФ и βФ – параметры корреляционной функции; τК - интервал времени корреляции.
В данной работе большое внимание уделяется буксованию гусеничного движителя, так как различие между коэффициентами буксования левой и
9
правой гусениц, а, следовательно, и между линейными скоростями перемещения правой и левой гусениц приводит к боковому уводу машины и понижению ее курсовой устойчивости.
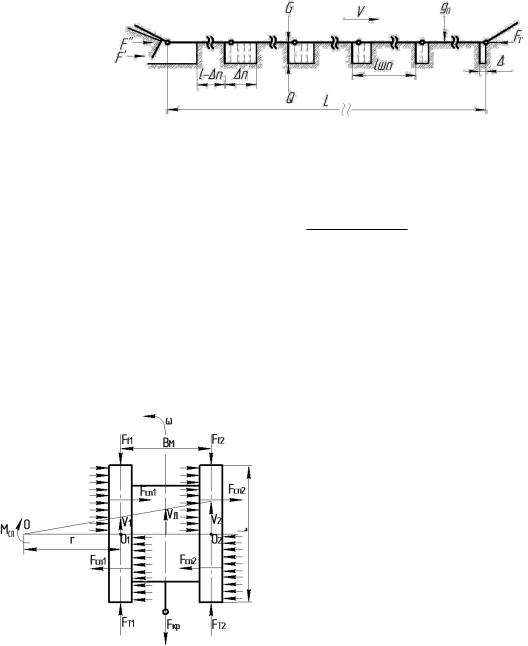
Сила тяги на гусенице равна по величине и противоположна по знаку сумме двух составляющих (рисунок 2): продольной реакции грунта на шпорах F′ и силы трения траков по грунту F″.
Рисунок 2 – Расчетная схема взаимодействия гусеницы с грунтом
Коэффициент буксования, в соответствии с теорией Н.А. Забавникова, можно представить в виде
|
2(FT СЦ G) |
. |
(9) |
kS(1 n)L |
где FТ – сила тяги на ГЛ, (Н); G – сила веса, приходящаяся на опорную ветвь ГЛ, (Н); k – коэффициент сопротивления грунта сжатию, (Н/м3); L – длина опорного участка ГЛ, (м); S – площадь шпоры, (м2); n – число шпор опорного участка ГЛ; υсц – коэффициент сцепления с грунтом.
При прямолинейном движении и при боковом уводе гусеничной машины на каждую гусеницу действуют силы сопротивления прямолинейному перемещению гусеницы и половина силы сопротивления на крюке, для ЦТЭ которой является сила сопротивления копания
грунта на РО - FКР (рисунок 3).
|
|
F F |
fi |
FКР , |
|
|
(10) |
||||
|
|
|
Ti |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
2(F |
|
|
F КР |
|
G ) |
|
|||
|
|
fi |
|
|
|||||||
i |
|
|
2 |
|
СЦ |
i |
(11) |
||||
|
|
|
|
|
, |
||||||
|
|
kS(1 n)L |
|
||||||||
|
|
|
|
|
|
|
|||||
где Ffi – сила сопротивления перемещению i- ой гусеницы, Gi – сила веса, приходящаяся на i-ую гусеницу.
Рисунок 3 – Внешние силы, |
Ffi Gi |
fi |
Gi |
hкi |
, |
(12) |
||
действующие на ЦТЭ |
|
|
L |
|||||
|
|
|
||||||
при боковом уводе |
h |
|
Gi |
, |
|
|
(13) |
|
|
|
|
||||||
|
|
|
|
|||||
|
кi |
|
kВL |
|
|
|
||
|
|
|
|
|
|
|||
где fi – коэффициент сопротивления перемещению (перекатыванию) i-ой гусеницы, В – ширина ГЛ.
При повороте гусеничной машины на каждую гусеницу совместно с силами сопротивления при прямолинейном перемещении действуют силы
10
сопротивления повороту – FСП1 и FСП2, возникает момент сил сопротивления повороту (рисунок 3).
В результате зависимость буксования гусеничного движителя имеет вид
|
2Gi2 |
2 СЦ Gi |
F КР |
|
|
|||||
|
|
|
|
|
||||||
|
2 |
|
|
|||||||
|
k B L |
|
|
|
|
, при 0; |
||||
|
|
|
|
|
||||||
|
|
kS(1 n)L |
|
|
|
|
|
|||
i |
2G |
2 |
|
2 П L G |
|
|
(14) |
|||
|
|
|
2 СЦ Gi |
|
|
|||||
i |
|
|
i |
F КР |
||||||
k B L2 |
R |
|
||||||||
|
|
|
|
|
i |
|
|
|
|
, при 0. |
|
|
|
|
kS(1 n)L |
|
|||||
|
|
|
|
|
|
|||||
где τП - коэффициент сопротивления повороту.
Зависимость буксования гусеничного движителя (14) отличается от ранее известных тем, что она одновременно учитывает конструкцию гусеницы, качество грунта, силы сопротивления прямолинейному перемещению и боковому уводу и силу сопротивления на крюке.
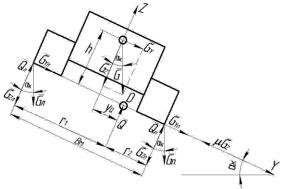
При наличии поперечного крена наблюдается неравномерное распределение силы веса машины между гусеницами, которое зависит от угла крена.
Это отражается зависимостью
|
|
G |
л |
|
r |
0, 5BM yQ |
|
|
|
|
|
|
|
2 |
|
|
K , |
(15) |
|
|
|
Gп |
|
0, 5BM yQ |
|||||
|
|
|
r1 |
|
|
||||
Рисунок 4 – Влияние угла крена αк на |
|
|
|
|
yQ h tg к . |
|
(16) |
||
изменение расстояния ri |
где h – вертикальная координата центра |
||||||||
|
|||||||||
тяжести ЦТЭ.
На рисунке 5 представлена структурная схема обобщенной математической модели рабочего процесса цепного траншейного экскаватора в обозначениях
MatLab Simulink.
В четвертой главе приведены результаты анализа влияния угла поперечного крена машины и геометрических параметров траков гусеничной ленты на распределение силы веса между гусеницами, на коэффициенты буксования и на силы сопротивления перемещению гусениц, а также на угловую скорость поворота, радиус поворота, на силу сопротивления на крюке, и на линейную скорость ЦТЭ. Угол наклона макрорельефа преимущественно влияет на распределение силы веса между гусеницами, а микрорельеф – на изменение реакции грунта на РО вследствие выглубления или заглубления РО в разрабатываемый грунт.