

е р и я в н у т р и в у з о в с к и х СибАДИм е т о д и ч е с к и х у к а з а н и й С и б А Д И
Министерство науки высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
« ибирский государственный автомо ильно-дорожный университет (СибАДИ)» Кафедра «Автомат зация производственных процессов и электротехника»
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к курсовой работе
Составители: В.С. Щербаков, Р.Ю. Сухарев
Омск ▪ 2018
СибАДИ |
||
УДК 681.5 |
Согласно 436-ФЗ от 29.12.2010 «О защите детей от информации, |
|
БКК 32.965 |
причиняющей вред их здоровью и развитию» данная продукция |
|
маркировке не подлежит. |
||
Т33 |
Рецензент: |
|
|
д-р техн. наук, проф. Н.С. Галдин (СибАДИ) |
|
Работа утверждена редакц онно- |
здательск м советом Си АДИ в качестве методических указаний. |
|
Т33 Теория автоматического управлен я [Электронный ресурс] : методические указания к курсовой работе / сост. : В.С. Щербаков,
Р.Ю. Сухарев. – (Серия внутривузовск х метод ческ х указаний Сиб ДИ). – Электрон. дан. – Омск : СибАДИ, 2018. – URL: http://bek.sibadi.org/cgi-bin/irbis64r plus/cgiirbis 64 ft.exe. - Режим доступа: для авторизованных пользователей.
Содержат задание, краткие теоретические сведения, методику и порядок выполнения курсовой работы по дисциплине «Теория автоматического управления».
Имеют интерактивное оглавление в виде закладок.
Рекомендованы обучающимся всех форм о учения направлений бакалавриата и магистратуры: Автоматизация технологических процессов и производств; Управление в технических системах.
Подготовлены на кафедре «Автоматизация производственных процессов и электротехника».
Текстовое (символьное) издание (690 КБ)
Системные требования: Intel, 3,4 GHz; 150 Мб; Windows XP/Vista/7; DVD-ROM;
1 Гб свободного места на жестком диске; программа для чтения pdf-файлов: Adobe Acrobat Reader; Foxit Reader
Техническая подготовка В.С. Черкашина Издание первое. Дата подписания к использованию 18.12.2018
Издательско-полиграфический комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5
РИО ИПК |
. 644080, г. Омск, ул. 2-я Поселковая, 1 |
|
ФГБОУ ВО «СибАДИ», 2018 |
ВВЕДЕНИЕ
В курсовой работе по теории автоматического управления (ТАУ) требуется провести анализ и синтез системы автоматического
регулирования (САР), содержащей контур с жесткой отрицательной |
|
САР |
|
обратной связью. Учитывая тот факт, что расчет систем различной |
|
физической природы, принадлежащих к определенному классу, одинаков, |
|
предложена |
угловой скорости двигателя постоянного тока. |
истема, |
предназначенная для расчета, является линейной |
системой третьего порядка, дифференциальные уравнения каждого звена которой могут быть составлены с применением известных в электромехан ке законов.
сигналов(управлен я ли возмущения) изменяются регулируемые переменные. Цель регулирования заключается в формировании таких
АР состо т з регулируемого объекта и элементов управления, которые воздействуют на о ъект при изменении одной или
бы многих случаях осложняетсяАналичием случайных возмущений
нескольк х регул руемых переменных. Под влиянием входных
законов, при которых выходные регулируемые переменные мало
отличались от тре уемых значений. Решение данной задачи во
(помех). При этом нео ходимо выбрать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались.
Курсовая работа выполняется в течение семестра и способствует закреплению знаний по дисциплине «Теория автоматического
управления». Выполнение работы позволит студентам получить |
|
навык исследования одноконтурных систем управления на |
|
|
И |
устойчивость различными способами, как с использованием ЭВМ, так |
|
и без их использования. |
Д |
3
|
|
1. ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ |
|
||
1. |
Подробно описать назначение и принцип действия САР. |
|
|||
2. |
оставить структурную схему системы и определить |
||||
передаточные функции звеньев. |
|
|
|
||
С |
|
|
|
||
3. |
Исследовать систему на устойчивость по 4 критериям |
||||
устойчивости. |
|
|
|
||
4. |
Подсч тать передаточный коэффициент системы, найти |
||||
статическую ош бку сделать вывод о необходимости применения |
|||||
коррект рующего звена. |
|
|
|
||
критер |
|
|
|
||
5. |
Включ ть в схему корректирующее звено, заданное в таблице |
||||
(см. пр л. 2). Найти его передаточную функцию и численные |
|||||
значен я параметров. |
|
|
|
||
6. |
б |
|
|
||
Исследовать скорректированную систему на устойчивость по 4 |
|||||
|
ям устойч вости. |
|
|
|
|
7. |
Состав ть передаточную функцию замкнутой системы и по ней |
||||
написать д фференц альное уравнение замкнутой системы. Решить |
|||||
полученное |
д фференциальное |
уравнение при |
условии, |
что |
|
M c const . |
Построить график |
(t) . Найти по |
графику |
(t) |
|
показатели качества переходного процесса.
8.Построить структурную схему системы в программном комплексе MATLAB Simulink, найти показатели качества переходного процесса, исследовать систему на устойчивость.
9.Сравнить результаты расчетов со значениями, полученными в
программном комплексе MATLAB Simulink, и сделать соответствующие выводы.АД
И
4
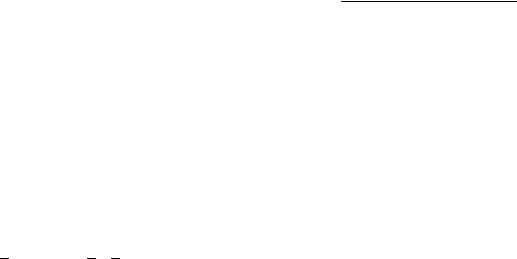
2. ИСХОДНАЯ СХЕМА СИСТЕМЫ СТАБИЛИЗАЦИИ УГЛОВОЙ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА И ПРИНЦИП ЕЕ ДЕЙСТВИЯ
Си б Рис. 1. ПринципиальнаяАсхема системы стабилизации угловой скорости ДПТ
для нечетных вариантов Д
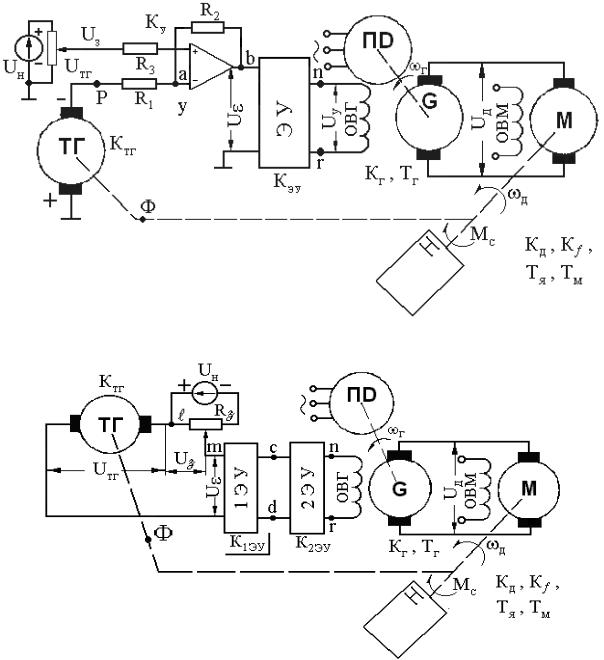
Рис. 2. Принципиальная схема системы стабилизацииИугловой скорости ДПТ для четных вариантов
Принцип работы исходной системы
Скорость вращения вала двигателя постоянного тока (ДПТ) задается напряжением UЗ, которое через сопротивление R3 подается на вход операционного усилителя (рис.1). Также на него подается через сопротивление R1 напряжение с тахогенератора UТГ.
5
При увеличении нагрузки MC уменьшается скорость вращения вала двигателя ωД и соответственно снижается напряжение
тахогенератора UТГ. Суммарное напряжение Uε увеличивается, следовательно, увеличивается напряжение обмотки возбуждения генератора (ОВГ), напряжение на двигателе и угловая скорость. При уменьшении нагрузки MC увеличивается напряжение тахогенератора
UТГ. уммарное напряжение Uε уменьшается, при этом уменьшается напряжен е ОВГ угловая скорость ДПТ снижается.
Пр нц п работы системы стабилизации, представленной на
двигателя
рис. 2 аналог чен.
Угловая скорость ωД изменяется с изменением нагрузки на валу |
|
С |
|
МС. В результате можно записать, что помеха равна: |
|
f(t) = kf MC(t), |
(1) |
где kf – передаточныйбкоэффициент по каналу помехи.
Стаб л зац я угловой скорости ωД достигается за счет подачи
напряжен я UД на якорную о мотку двигателя. САР является статической, поэтому ра отает со статической ошибкой, которая не должна превысить заданнойАвеличины.
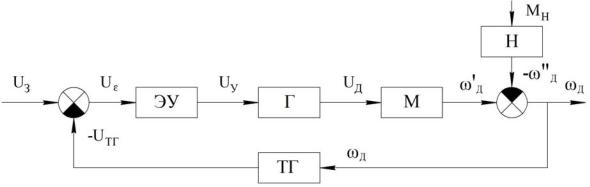
3. СТРУКТУРНАЯ СХЕМА СИСТЕМЫ СТАБИЛИЗАЦИИ И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ЕЕ ЭЛЕМЕНТОВ
Принципиальные схемы системДстабилизации (рис. 1,2) преобразуются в блок–схемы (рис. 3,4), по которым выводятся дифференциальные уравнения отдельных элементов.
И
Рис. 3. Блок–схема системы стабилизации угловой скорости ДПТ для нечетных вариантов
6
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
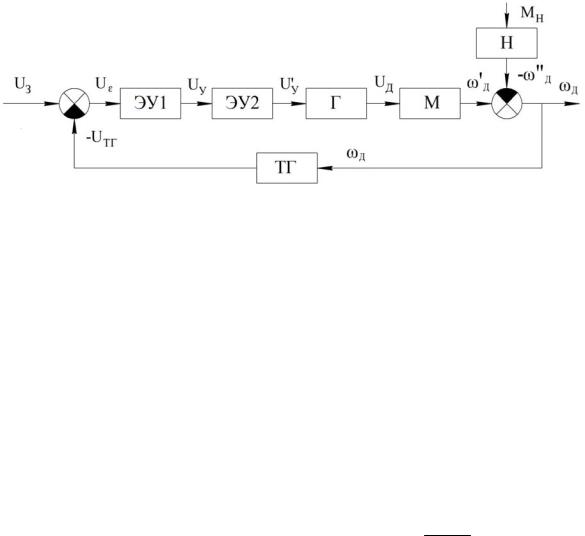
Р с. 4. Блок–схема системы стабилизации угловой скорости ДПТ |
|
|||||||||||||||||||||||||||||||||||||||
Дифференц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
для четных вариантов |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
альные уравнения элементов системы: |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
1. |
|
|
бdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
ЭУ – электронный усилитель: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
2. |
Г – генератор: |
|
|
|
|
|
|
UУ U |
kЭУ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||||||||||||||
|
|
|
|
|
|
|
dU Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
T |
U |
Д |
|
k |
U |
У |
. |
|
|
|
|
|
|
|
|
|
(3) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
3. M – двигатель постоянного тока: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
d 2 Д |
|
|
|
d Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dМ |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||||||||||||||
T |
Я |
T |
|
|
|
T |
|
|
|
|
|
|
Д |
k |
Д |
U |
У |
k |
f |
(T |
Я |
|
|
|
|
|
Н М |
Н |
). (4) |
|||||||||||||||
|
|
М |
|
dt 2 |
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Аdt |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
4. |
ТГ – тахогенератор: |
|
|
UТГ |
|
|
|
|
kТГ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
И |
|||||||||||||
|
|
По уравнениям звеньев САР вывести передаточные функции. |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
4. ПРОВЕРКА СТАТИЧЕСКОЙ ОШ БКИ |
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
Передаточная функция разомкнутой системы: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
WРАЗ( p) WЭУ ( p) WГ ( p) WД ( p) WТГ ( p) ; |
|
|
(6) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
W |
( p) k |
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
k ; |
|
|
(7) |
|||||||
|
|
|
|
|
|
|
|
T p 1 |
|
|
|
T |
|
p2 T |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
РАЗ |
|
|
|
|
ЭУ |
|
T |
Я |
|
|
p 1 |
ТГ |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
W РАЗ ( p ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k РС |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
(8) |
||||||||
|
|
|
|
|
(T p 1) (T |
Я |
T |
М |
p 2 |
T |
М |
p 1) |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
kРC kЭУ k1 |
k Д kТГ |
|
– |
|
|
коэффициент |
|
передачи разомкнутой |
|||||||||||||||||||||||||||||||||||
системы.
7