

1244
.pdfРАСЧЕТ ДИСКРЕТНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ИМПУЛЬСНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению курсового проекта
для студентов направления 220700.62
Омск – 2013
Министерство образования и науки РФ Федеральное государственное бюджетное образовательное
учреждение высшего профессионального образования «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Кафедра АПП и электротехника
РАСЧЕТ ДИСКРЕТНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ИМПУЛЬСНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению курсового проекта
для студентов направления 220700.62
Составители: В.С. Щербаков, С.Д. Игнатов
Омск
СибАДИ
2013
УДК 681.5 ББК 32.965-01
Рецензент д-р техн. наук, проф. Н.С. Галдин
Работа одобрена научно-методическим советом направления 220700.62 «Автоматизация технологических процессов и производств» в качестве методических указаний по выполнению курсового проекта по дисциплине «Теория автоматического управления» для студентов направления 220700.62.
Расчет дискретного корректирующего устройства импульсной систе-
мы автоматического управления: методические указания к выполнению курсового проекта для студентов направления 220700.62/сост.: В.С. Щербаков, С.Д. Игнатов. Омск: СибАДИ, 2013. 24 с.
Рассматриваются вопросы анализа дискретных систем автоматического управления, расчета дискретных корректирующих устройств по заданным показателям качества системы автоматического управления, нахождения показателей качества переходных процессов. Даются примеры анализа дискретной системы автоматического управления.
Табл. 1. Ил. 9. Библиогр.: 3 назв.
ФГБОУ ВПО «СибАДИ», 2013
|
ОГЛАВЛЕНИЕ |
|
1. |
ЦЕЛИ И ЗАДАЧИ ДИСЦИПЛИНЫ................................................... |
4 |
2. |
СОДЕРЖАНИЕ КУРСОВОГО ПРОЕКТА......................................... |
5 |
3. |
ТЕОРЕТИЧЕСКАЯ СПРАВКА........................................................... |
7 |
|
3.1. Понятие «дискретная система»..................................................... |
7 |
|
3.2. Классификация дискретных систем........................................... |
10 |
4. |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ |
|
КУРСОВОГО ПРОЕКТА....................................................................... |
12 |
|
|
4.1. Расчет и построение ЛПЧХ разомкнутой импульсной |
|
|
системы, состоящей из функционально необходимых |
|
|
элементов, и оценка ее устойчивости и качества |
12 |
|
4.2. Расчет параметров и построение заданной типовой |
|
|
ЛПЧХ по заданным требованиям к качеству системы |
12 |
|
4.3. Расчет дискретного корректирующего устройства |
15 |
|
4.4. Определение алгоритма работы ЦВМ в роли |
|
|
дискретного корректора. Реализация дискретного |
|
|
корректирующего устройства в виде импульсной RC-цепи |
16 |
|
4.5. Построение переходной функции |
|
|
в скорректированной системе |
16 |
5. |
ПРИМЕР ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА..................... |
17 |
Библиографический список................................................................... |
22 |
|
3
1. ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ
Изучение дисциплины «Теория дискретных систем» (ТДС) основывается на знаниях, умениях и навыках, полученных студентами при освоении основных понятий теории управления дискретными системами; классификации дискретных систем управления (ДСУ); поведения объектов и ДСУ; информации и принципов управления; примеров ДСУ техническими, экономическими и организационными объектами.
При изучении дисциплины ТДС студент анализирует структурные особенности ДСУ, а также осваивает задачи и методы анализа и синтеза ДСУ.
Бакалавр по направлению 220700.62 после изучения дисциплины ТДС должен:
иметь представление об основных принципах и концепциях построения дискретных систем автоматического управления и их характеристиках, о методах анализа и синтеза дискретных систем автоматического управления;
знать, уметь использовать и составлять математические описания дискретных систем автоматического управления, использовать методы анализа устойчивости и качества дискретных систем автоматического управления, обоснованно выбирать структуры и схемы коррекции, рассчитывать оптимальные параметры корректирующего устройства;
иметь опыт исследования объектов и дискретных систем автоматического управления, решения задач анализа и синтеза дискретных систем автоматического управления с использованием персональных ЭВМ.
Знания, умения и навыки, полученные студентами при изучении ТДС, могут быть использованы при изучении общепрофессиональных дисциплин «Средства автоматизации и управления», «Моделирование систем и процессов», при изучении специальных дисциплин «Технологические процессы автоматизированных производств», «Автоматизированные системы безопасности грузоподъемных машин», «Автоматизация технологических процессов производства», «Проектирование автоматизированных систем», «Системы автоматики предприятий нефтегазовой отрасли», «Диагностика и надежность автоматизированных систем».
4
2. СОДЕРЖАНИЕ КУРСОВОГО ПРОЕКТА
Задание:
1.Расчет и построение логарифмической псевдочастотной характеристики (ЛПЧХ) разомкнутой импульсной системы, состоящей из функционально необходимых элементов, и оценка ее устойчивости и качества.
2.Расчет параметров и построение заданной типовой желаемой ЛПЧХ по заданным требованиям к качеству системы.
3.Расчет дискретного корректирующего устройства.
4.Определение алгоритма работы цифровой вычислительной машины (ЦВМ) в роли дискретного корректора. Реализация дискретного корректирующего устройства в виде импульсной RC- цепи.
5.Построение переходной функции в скорректированной системе.
Перечень необходимого графического материала:
1.Функциональная схема скорректированной системы и принципиальная схема дискретного корректирующего устройства при его реализации импульсным RC-фильтром либо структурная схема реализации алгоритма на ЦВМ.
2.Логарифмические псевдочастотные характеристики функционально необходимой и требуемой части системы, а также дискретного корректирующего устройства.
3.Переходная функция импульсной системы.
4.Прочие вспомогательные и расчетные графики и рисунки. Примерное содержание
пояснительной записки определяется заданием, дополненным введением и выводами. Пояснительная записка должна содержать весь необходимый расчетный и графический материал.
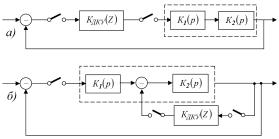
Структурные схемы систем с последовательной дискретной коррекцией и дискретной коррекцией в цепи обратной связи
Рис. 1. Структурные схемы импульсных систем с последовательной дискретной коррекцией (а) и дискретной коррекцией в цепи ОС (б)
5
(ОС) представлены соответственно на рис. 1, а и б. Исходные данные приведены в таблице.
6

|
|
|
|
|
Воздействия |
|
|
|
|
|
Требования к качеству |
|
|
|
||||||||
|
Вариант |
|
медленно меняющ. |
гармонич. |
Помеха S м |
Типовая ЛПЧХs/v |
м |
Составляющая ошибок |
град |
|
|
|
(ω рад |
|||||||||
|
|
м/с |
м/с |
м/с |
град/с |
град/с |
м |
м |
|
м2 |
|
|
|
|||||||||
|
|
|
|
х(t) |
|
β(t) |
,ω)( с |
|
|
|
|
|
|
|
|
|
|
|
|
|
), |
|
|
|
Кф(р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
T,c |
* с |
||
|
|
|
|
|
|
|
|
z , |
z , |
z , |
|
n |
|
|
|
|
|
|
||||
|
|
|
max, |
max, |
f 2 |
|
|
zf , |
|
max, |
|
|
|
|
||||||||
|
|
|
хmax, |
xmax, |
xmax, |
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|||||
|
1 |
|
50 |
24 |
– |
– |
– |
– |
2/1 |
10 |
4 |
– |
|
– |
|
|
– |
|
– |
0,04 |
π/4 |
|
|
2 |
|
40 |
20 |
– |
– |
– |
– |
2/1 |
8 |
5 |
– |
|
– |
|
|
– |
|
– |
0,08 |
π/4 |
|
|
3 |
|
– |
– |
– |
12 |
8 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,2 |
|
1,4 |
0,06 |
– |
||
|
4 |
|
– |
– |
– |
20 |
10 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,1 |
|
1,5 |
0,05 |
– |
||
|
5 |
|
– |
40 |
10 |
– |
– |
– |
3/2 |
– |
5 |
5 |
|
– |
|
|
– |
|
– |
0,2 |
π/4 |
|
|
6 |
|
– |
30 |
20 |
– |
– |
– |
3/2 |
– |
6 |
5 |
|
– |
|
|
– |
|
– |
0,1 |
π/4 |
|
|
7 |
|
– |
– |
– |
10 |
8 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,2 |
|
1,5 |
0,1 |
– |
||
|
8 |
|
– |
– |
– |
16 |
4 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,1 |
|
1,6 |
0,05 |
– |
||
|
9 |
|
– |
24 |
16 |
– |
– |
– |
3/2 |
– |
6 |
4 |
|
– |
|
|
– |
|
– |
0,04 |
π/3 |
|
|
10 |
|
– |
18 |
12 |
– |
– |
– |
3/2 |
– |
4 |
3 |
|
– |
|
|
– |
|
– |
0,08 |
π/3 |
|
6 |
11 |
|
– |
– |
– |
0,5 sin |
0,02t |
10 |
2/1 |
– |
– |
– |
min |
|
20 |
|
1,2 |
0,05 |
– |
|||
12 |
|
– |
– |
– |
1,2 sin |
0,1t |
0,5 |
2/1 |
– |
– |
– |
2,5 |
|
min |
|
1,4 |
0,1 |
– |
||||
|
|
|
|
|||||||||||||||||||
|
13 |
|
– |
– |
– |
1,0 sin |
0,05t |
4 |
2/1 |
– |
– |
– |
10 |
|
|
1 |
|
min |
0,06 |
– |
||
|
14 |
|
30 |
20 |
– |
– |
– |
– |
2/1 |
6 |
4 |
– |
|
– |
|
|
– |
|
– |
0,5 |
π/4 |
|
|
15 |
|
18 |
10 |
– |
– |
– |
– |
3/1 |
3 |
2 |
– |
|
– |
|
|
– |
|
– |
0,4 |
π/4 |
|
|
16 |
|
– |
– |
– |
10 |
6 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,3 |
|
1,5 |
0,3 |
– |
||
|
17 |
|
– |
– |
– |
15 |
9 |
– |
2/1 |
– |
– |
– |
|
– |
|
0,2 |
|
1,4 |
0,2 |
– |
||
|
18 |
|
– |
16 |
12 |
– |
– |
– |
3/2 |
– |
4 |
3 |
|
– |
|
|
– |
|
– |
0,5 |
π/4 |
|
|
19 |
|
– |
25 |
15 |
– |
– |
– |
3/2 |
– |
5 |
3 |
|
– |
|
|
– |
|
– |
0,4 |
π/4 |
|
|
20 |
|
– |
– |
– |
12 |
10 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,1 |
|
1,6 |
0,3 |
– |
||
|
21 |
|
– |
– |
– |
20 |
16 |
– |
3/2 |
– |
– |
– |
|
– |
|
0,5 |
|
1,4 |
0,2 |
– |
||
|
22 |
|
– |
12 |
10 |
– |
– |
– |
3/2 |
– |
3 |
2 |
|
– |
|
|
– |
|
– |
0,6 |
π/3 |
|
|
23 |
|
– |
20 |
16 |
– |
– |
– |
3/2 |
– |
5 |
4 |
|
– |
|
|
– |
|
– |
0,4 |
π/3 |
|
|
24 |
|
– |
– |
– |
2,5 sin |
0,05t |
20 |
2/1 |
– |
– |
– |
min |
|
10 |
|
1,1 |
0,5 |
– |
|||
|
25 |
|
– |
– |
– |
10 sin |
0,02t |
2,5 |
2/1 |
– |
– |
– |
16 |
|
min |
|
1,5 |
0,4 |
– |
|||
|
26 |
|
– |
– |
– |
0,5 sin |
4t |
10 |
2/1 |
– |
– |
– |
25 |
|
|
3 |
|
min |
0,3 |
– |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. ТЕОРЕТИЧЕСКАЯ СПРАВКА
3.1. Понятие «дискретная система»
Среди систем автоматического управления распространены системы, в которых сигналы могут быть описаны дискретными функциями времени [1,3].
Дискретные системы – это системы, содержащие элементы, которые преобразуют непрерывный сигнал в дискретный. В дискретных системах сигналы описываются дискретными функциями времени.
Дискретность сигналов управления будет присутствовать, например, в случае применения для управления объектом ЭВМ. В принципе системы, в которых используются цифровые преобразователи сигналов или ЭВМ, будут характеризоваться присутствием дискретных сигналов управления или информации [1,3].
Квантование – процесс преобразования непрерывного сигнала в дискретный. В зависимости от используемого вида квантования системы можно классифицировать:
импульсные системы, использующие квантование по вре-
мени;
релейные системы, использующие квантование по уровню;
цифровые системы, использующие квантование по уровню
ипо времени (комбинированное квантование).
Дискретные сигналы создаются на основе непрерывных сигналов. Процесс преобразования непрерывного сигнала в дискретный называется квантование сигнала. Исходный непрерывный сигнал называется квантуемый сигнал, сигнал, получаемый в результате квантования, называется квантованный сигнал. Существуют разные способы квантования непрерывного сигнала [1].
Квантование по времени. Квантованный сигнал содержит отдельные значения (дискреты) квантуемого сигнала, которые выделяются в фиксированные моменты времени.
Процесс квантования по времени показан на рис. 2, где x(t) – квантуемый сигнал, x*(t) – квантованный сигнал [1].
Значения сигнала выделяются через равные промежутки времени T, где T – период (интервал) квантования. Следовательно, квантованный сигнал будет состоять из последовательности дискрет квантуемого сигнала, выделенных в моменты времени, крат-
7

ные периоду квантования. Квантованный сигнал при квантовании по времени описывается решетчатой функцией времени квантуемого сигнала [1]
x*(t) x(mT), |
(1) |
где m – целочисленный аргумент времени, m=1,2,3…
Рис. 2. Квантование сигнала по времени
Квантование по уровню. В моменты достижения квантуемым сигналом некоторых фиксированных уровней квантованному сигналу присваивается значение достигнутого уровня, и это значение квантованного сигнала сохраняется до момента достижения квантуемым сигналом следующего уровня (рис. 2) [1].
Рис. 3. Квантование сигнала по уровню
На рис. 3 для квантуемого сигнала x(t) определены уровни квантования с интервалом (шагом) a. Значения квантованного сигнала x*(t) изменяются в момент достижения квантуемым сигналом очередного уровня. В результате квантованный сигнал представляет собой ступенчатую функцию времени [1].
8