МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ В ЗАДАЧАХ НЕФТЕГАЗОВОЙ ОТРАСЛИ
.pdfСПБГУАП| Институт 4 группа 4736
5.МНОГОМЕРНЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ
5.1. Механические модели деформации среды.
Качественное описание процессов деформации основаны на различных теоретических моделях. Для построения замкнутой теории движения среды должна быть известна связь между кинематическим и динамическим состояниями частицы, в частности между напряжениями и деформациями, выражаемая при помощи механического уравнения состояния тела [1,4,5].
К простым средам относятся следующие тела: упругое, вязкое, жесткопластическое. Механическое уравнение состояния упругого тела выражается при помощи закона Гука, который для одноосного напряженного состояния имеет вид:
E , |
(5.1) |
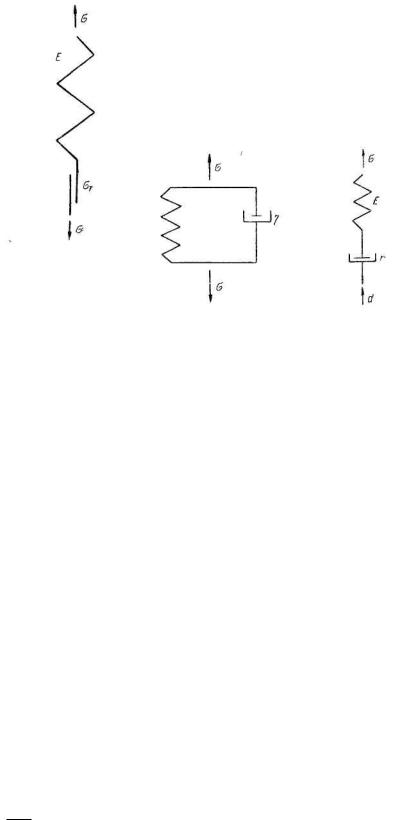
где — напряжение; Е — модуль Юнга; — относительная деформация. Механическое уравнение состояния упругого тела изображается в виде
механической модели, представляющей собой пружину (рис. 5.1 ). Механическое уравнение состояния вязкого тела для одноосного
напряженного состояния выражается при помощи закона Ньютона
|
|
|
d |
. |
(5.2 ) |
|
|
|
|||
|
|
|
dt |
|
|
где — вязкость; |
d |
- — скорость деформации. |
|
||
dt |
|
||||
|
|
|
|
|
|
Вязкое тело изображается моделью, состоящей из поршня, двигающегося в цилиндре с вязкой жидкостью (рис.5.2 ).
Жестко-пластическое тело при напряжениях ниже предела текучести ат не деформируется. В таком теле течение развивается лишь при напряжениях, удовлетворяющих условию текучести . Модель такой среды может
быть изображена в виде площадки с кулоновым трением (рис.5.3 ).
Выше были приведены три простейшие механические модели, иллюстрирующие механические уравнения состояния вязкого, упругого и жестко-пластического тела. Комбинируя эти простые модели,
Рис. 5.1 |
Рис. 5.2 |
Рис. 5.3 |
161
Контакты | https://new.guap.ru/i03/contacts
СПБГУАП| Институт 4 группа 4736
можно рассматривать различные сложные среды. Так, упругопластическую среду можно характеризовать моделью, в которой
последовательно соединены упругий и пластический элементы (рис.5.4 ).
Упруго-вязкая среда Фойхта характеризуется моделью, в которой параллельно соединены упругий и вязкий элементы (рис. 5.5 ).
Рис. 5.4 |
Рис. 5.5 |
Рис. 5.6 |
Для такой среды полное напряжение будет складываться из напряжения, соответствующего упругой деформации, и напряжения, вызываемого вязким сопротивлением,
|
|
|
|
|
|
E |
d |
. |
(5.3) |
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
В |
состоянии покоя, |
т. е. при |
|
d |
0 , такая среда ведет себя как упругая. |
|||||||
|
|
dt |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
При const |
в среде возникает |
постоянное напряжение E . Если при |
||||||||||
t = 0, 0 |
const , то |
из (5.3 ) получим |
||||||||||
|
|
0 |
|
|
E |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 e |
. (5.4 ) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим теперь среду, которой соответствует модель, состоящая из последовательно соединенных упругого и вязкого элементов (рис. 5.6). Для такой среды Максвеллом, получен следующий закон деформации:
|
d |
|
|
d 1 |
|
d 2 |
, (5.5) |
|
|
||
|
dt |
|
dt |
dt |
|
|
|||||
|
|
|
|
|
|
|
|
||||
где |
d |
|
скорость деформации; |
d 1 |
- скорость упругой деформации; |
||||||
|
dt |
dt |
|||||||||
|
|
|
|
|
|
|
|
||||
d 2 -скорость вязкой деформации. dt
Из закона Гука дифференцированием определим
162
Контакты | https://new.guap.ru/i03/contacts

СПБГУАП| Институт 4 группа 4736
d 1 1 d (5.6 ) dt E dt
Определив ddt2 - из закона Ньютона (5.2) и подставив полученные
значения d 1 из (5.5) и (5.6 ), получим dt
|
d |
|
1 d |
|
|
(5.7 ) |
||
|
|
|
|
|
|
|||
|
dt |
E dt |
||||||
|
|
|
|
|||||
Если |
|
|
const , то тело, описываемое уравнением (5.7), будет |
|||||
деформироваться с постоянной скоростью, т. е. течь подобно вязкой
жидкости. |
|
|
|
|
|
|
|||
Теперь рассмотрим другой случай. Пусть в момент времени t = 0 на |
тело |
||||||||
действует напряжение 0 и соответствующее |
начальное |
|
|
|
|||||
относительное удлинение, равное |
0 |
. Положим |
0 const , что достигается, |
||||||
|
|||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
в частности, закреплением концов стержня. В этом случае |
|
0 |
и из |
||||||
dt |
|||||||||
уравнения (5.7) |
|
|
|
|
|
|
|||
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
e t0 , (5.9) |
|
|
|
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
где t0 E время релаксации
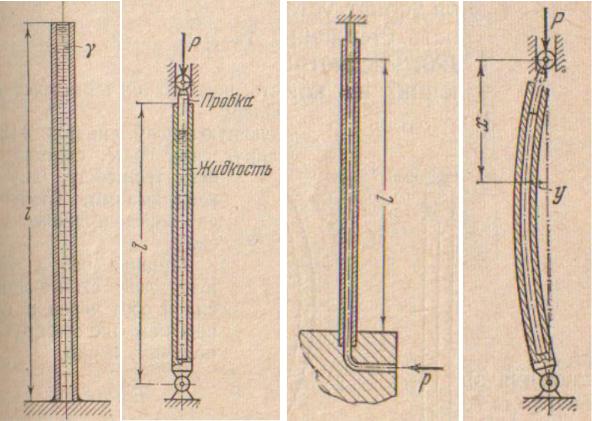
Из (5.9) видно, что напряжение со временем изменяется по закону экспоненты при t стремится к нулю (рис. 5.7). Уравнение Максвелла с качественной стороны описывает так называемую релаксацию напряжения, т. е. ослабление со временем напряженного состояния при неизменной деформации. В дальнейшем уравнение Максвелла будет нами использовано для конкретного объяснения явления вытекания глин в скважину в процессе проводки скважины и дальнейшей ее эксплуатации. Находясь под нагрузкой, твердые тела (в частности, цементный камень) медленно деформируются. С повышением температуры это явление текучести тел резко возрастает.
Текучесть твердых тел при высоких температурах обладает рядом характерных свойств и называется ползучестью, или крипом. Изучение ползучести твердых тел проводится опытным путем — растяжением стержней при постоянной температуре и фиксированных нагрузках.
Отложим на оси ординат относительное удлинение, а на оси абсцисс — общее время испытания t, тогда кривая длительных испытаний будет иметь вид, показанный на рис. 8. Отрезок ОА соответствует начальной деформации 0 , полученной стержнем при его
163
Контакты | https://new.guap.ru/i03/contacts

СПБГУАП| Институт 4 группа 4736
Рис. 5.7 |
Рис.5.8. |
нагружении. Отрезок АВ характеризует убывание скорости ползучести. С приближением к точке В уменьшение скорости деформации замедляется, и на участке ВС, называемом вторым периодом ползучести, скорость деформации практически становится постоянной. Указанный период, характеризуемый минимальной скоростью ползучести, бывает обычно наиболее длительным и заканчивается разрушением тела.
Вязко-пластическое тело изображается моделью, которая состоит из вязкого элемента и площадки с кулоновым трением, соединенных параллельно (рис.5.9). Уравнение деформации вязко-пластического тела Шведова — Бингама имеет следующий вид:
0 d при 0 , dt
где — предельное напряжение сдвига.
При 0 то тело не деформируется. Из рис. 5.10 видно, что для ряда тел
течение наступает только после определенной нагрузки, при этом скорость течения зависит от вязкости среды.
Для выражения механических свойств высокополимеров необходимо привлекать модели, состоящие из многих элементов. Обычно для таких моделей характерно большое число параметров. Авторы рассматривали двухпараметрические модели E, , E1, ,или , .
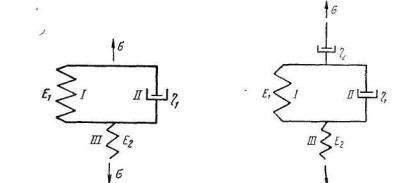
Рассмотрим модель (рис. 11), содержащую три параметра Е1, Е2, 1 . Для такой среды закон деформации можно получить следующим образом.
Рис.5.9 |
Рис.5.10 |
164
Контакты | https://new.guap.ru/i03/contacts