

3. Кинематическое исследование плоских
РЫЧАЖНЫХ МЕХАНИЗМОВ
3.1. Задачи и методы кинематического исследования механизмов
В разд. 2 было показано, как любой механизм можно разложить на группы Ассура, каждая из которых при присоединении кинематическими парами к неподвижному звену обращается в статически определимую систему. Это поз-воляет развить методы кинематического и динамического исследования в применении не к механизму в целом, а к его отдельным частям, что удобно, так как можно обобщить методы исследования и сократить количество разновидностей механизмов для рассмотрения.
Основной задачей кинематики механизмов является изучение движения звеньев механизмов вне зависимости от сил, действующих на эти звенья, т. е. следует определить:
1) положение всех звеньев при любом мгновенном положении ведуще- го звена;
2) траекторию движения точек звеньев;
3) линейную скорость и ускорение точек звеньев;
4) угловую скорость и ускорение звеньев.
Существуют три основных метода кинематического исследования механизмов:
графиков (наименее трудоемкий и точный);
планов (более трудоемкий и точный);
аналитический (наиболее трудоемкий и точный).
В инженерных расчетах применяется графоаналитический метод, который дает удовлетворительную точность, но требует аккуратного выполнения графических работ и соблюдения масштаба.
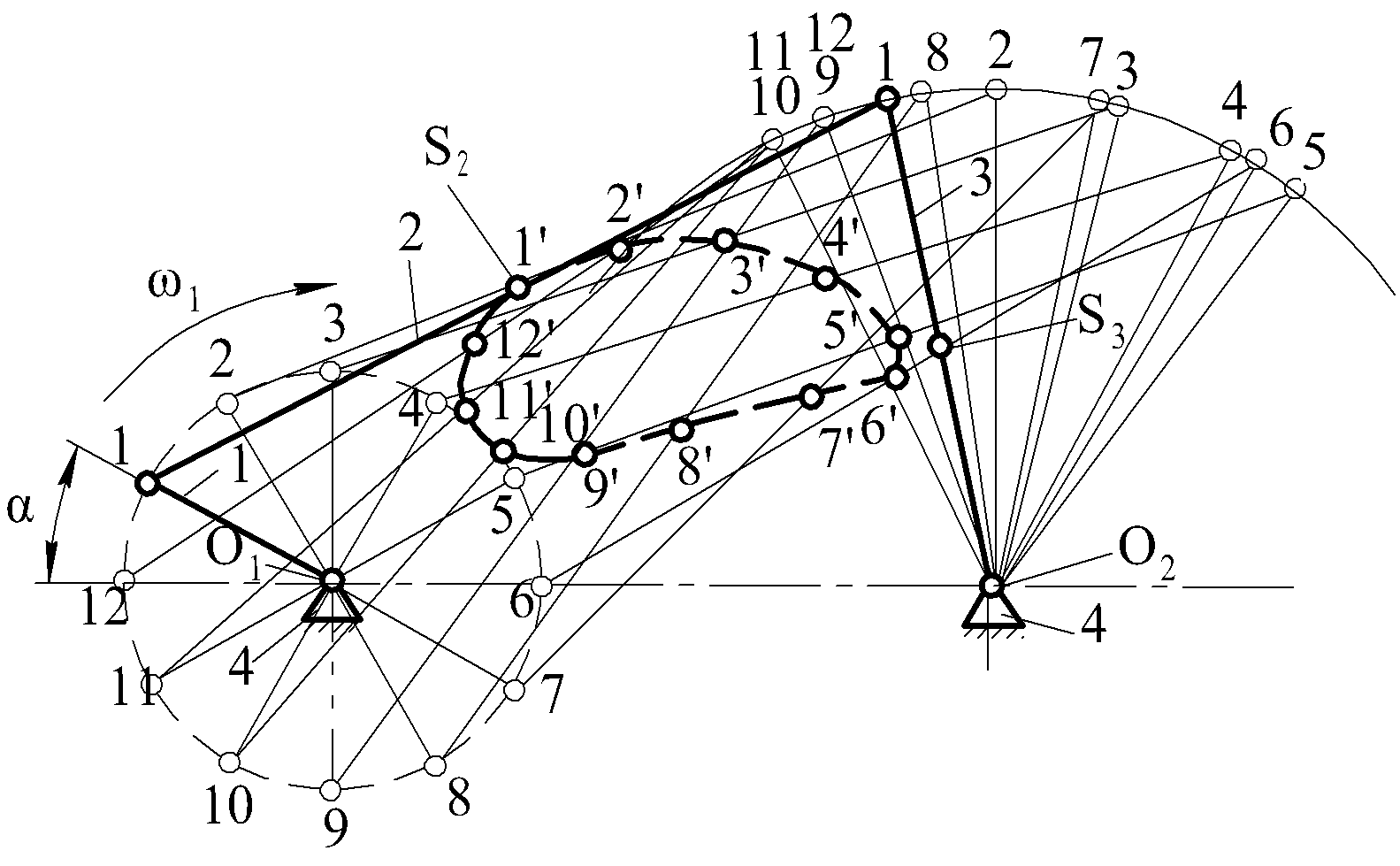
Под масштабом подразумевается определение масштабного коэффициента k (отношение действительной величины, выраженной в соответствующих единицах, к длине отрезка, изображающего эту величину, выраженную в миллиметрах). При построении кинематических схем и планов положений механизмов (рис. 3.1, а) определяется масштабный коэффициент длины kl, показывающий число метров натуральной величины в одном миллиметре чер- тежа, м/мм:
-
 ,
,( 3.1)
где
![]()
действительная длина кривошипа, м
действительная длина кривошипа, м
О1А длина отрезка, изображающего кривошип на чертеже, мм.
При построении
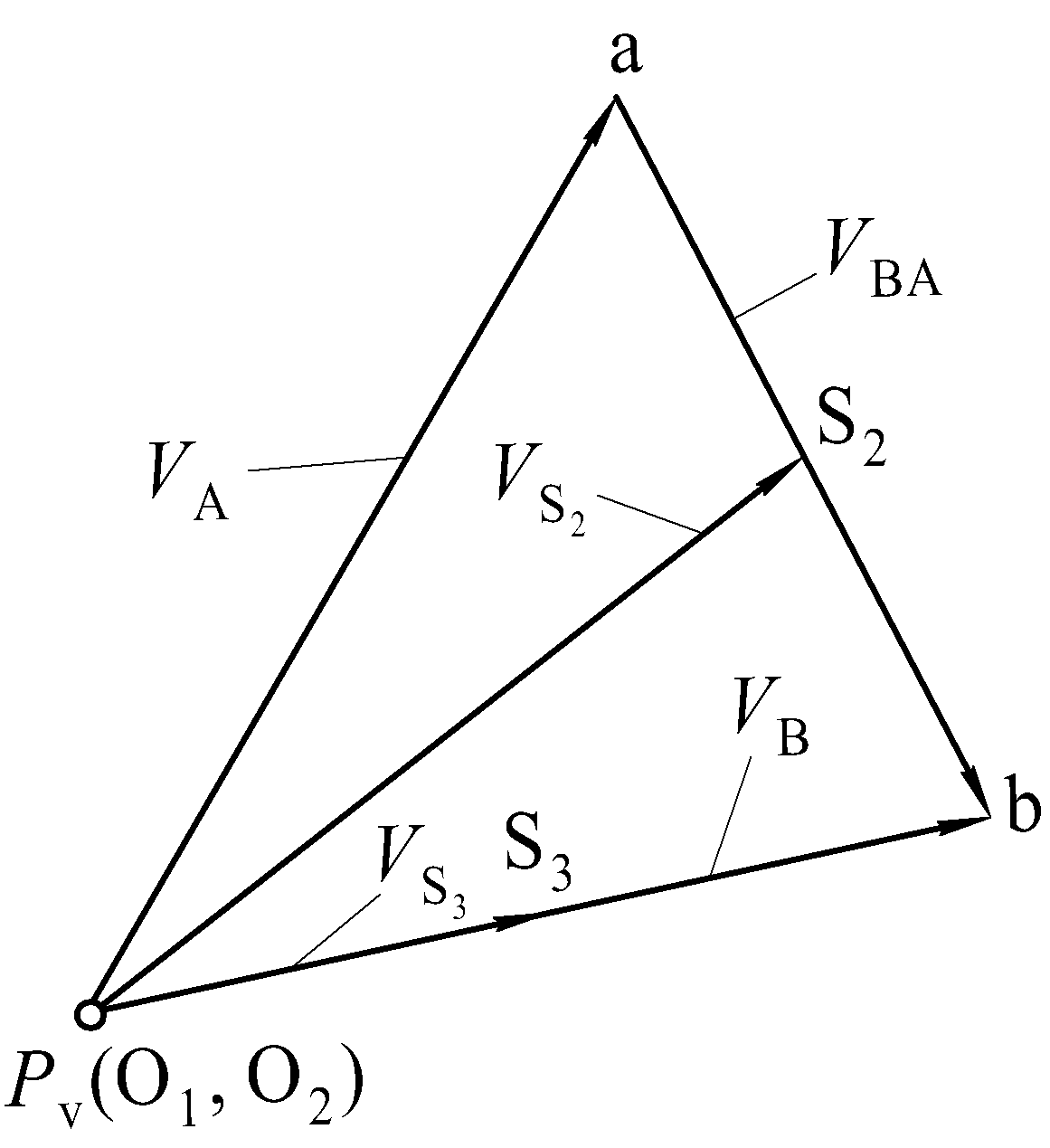
планов скоростей и ускорений на чертеже
приходится откладывать значения скорости
и ускорения в некотором масштабе.
Например, если вектор вычисленной
скорости точки
![]() ,
м/с, на плане скоростей изображен в виде
отрезка
,
м/с, на плане скоростей изображен в виде
отрезка
![]() произвольной
длины, мм,
(рис. 3.1, б)
то, поделив значение скорости VА
на длину этого отрезка, найдем масштабный
коэффициент плана скоростей, м/с·мм-1:
произвольной
длины, мм,
(рис. 3.1, б)
то, поделив значение скорости VА
на длину этого отрезка, найдем масштабный
коэффициент плана скоростей, м/с·мм-1:
![]() .
(3.2)
.
(3.2)
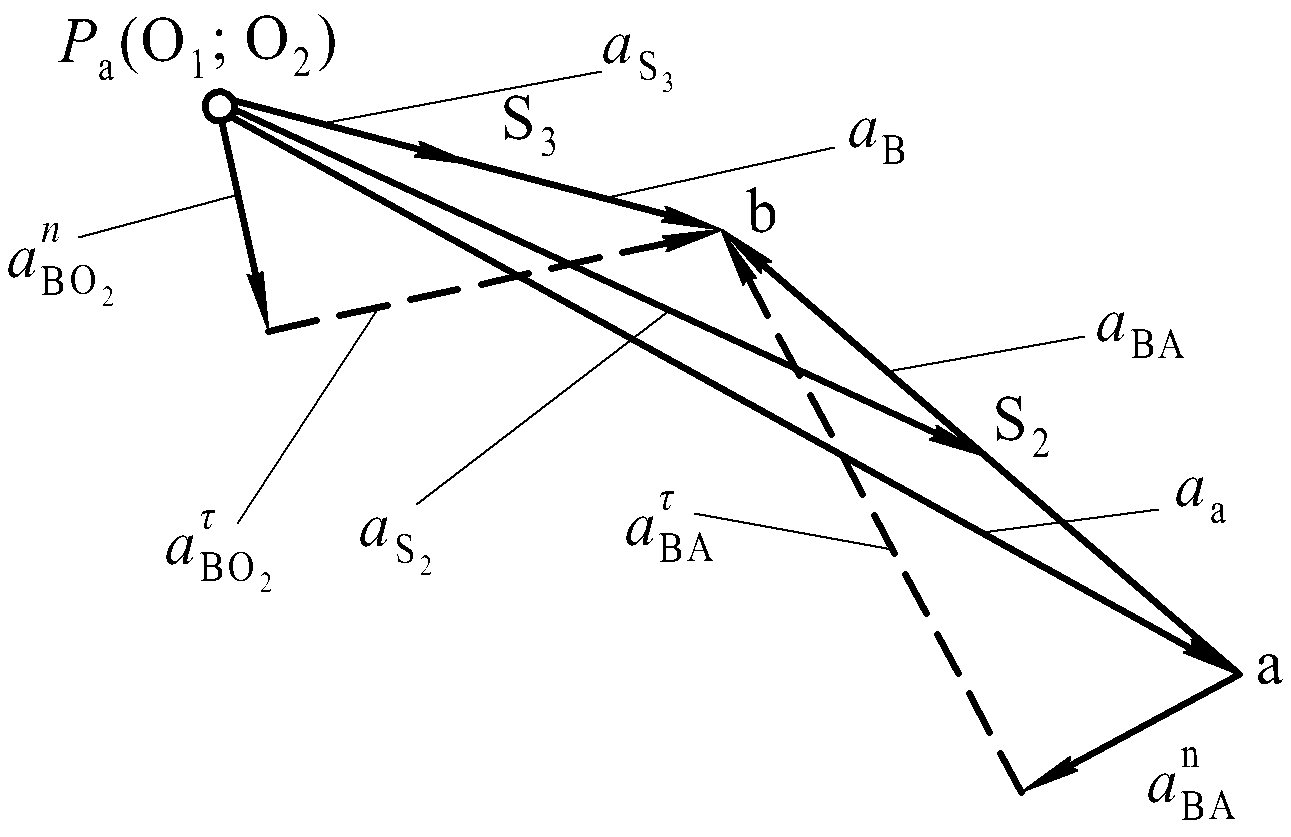
Аналогично найдем масштабный коэффициент плана ускорений, м/с2∙мм-1 (рис. 3.1, в):
![]() ,
(3.3)
,
(3.3)
где аА вычисленное значение ускорения точки А, м/с2;
![]()
отрезок произвольной
длины, соответствующий ускорению точки
А на чертеже, мм.
отрезок произвольной
длины, соответствующий ускорению точки
А на чертеже, мм.
Истинные значения скоростей и ускорений любых точек механизма получают путем умножения масштабных коэффициентов на длину соответствующих векторов.
а
|
|
б в
Рис. 3.1