

Лекция 9 за 4 ноября для всего 48 потока
.docxЛекция 9
Для всех студентов 48 потока. Эта лекция, которая пропадает в связи с выходным днем 4 ноября.
Лекцию необходимо коротко законспектировать в лекционную тетрадь.
5. Режимы движения механизмов
Промежуток времени от момента начала движения механизма до момента конца его движения называется полным временем движения механизма. Но так как закон движения всех звеньев механизма определяется законом движения ведущего (начального) звена, то полным временем движения механизма можно считать начало и конец движения ведущего звена.
Полное время движения состоит из трех частей:
1 – времени разбега (разгона);
2 – времени установившегося движения;
3 – времени выбега (остановки).
Во время разбега скорость ведущего звена возрастает от нулевого значения до некоторого среднего значения. Во время установившегося движения скорость ведущего звена колеблется около средней скорости, что соответствует его нормальной работе. Промежуток времени, когда положение ведущего звена, скорость и ускорение принимают первоначальное значение, называется циклом установившегося движения механизма. Выбег характеризуется уменьшением скорости ведущего звена от среднего значения до нуля.
На рис. 5.1 изображена тахограмма механизма – кривая ω = ω(t) зависимости угловой скорости ω ведущего звена от времени t.
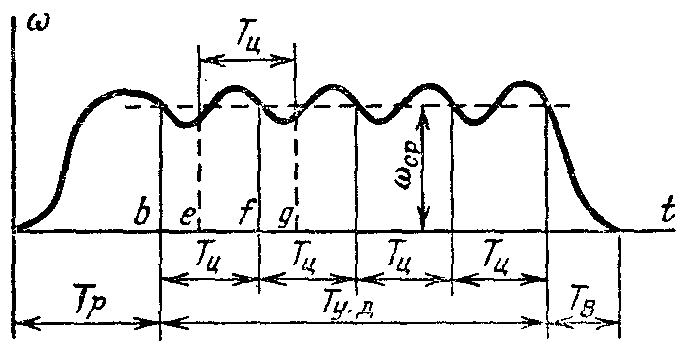
Рис. 5.1
Полное время Т движения механизма состоит из времени Тр разбега, времени Ту.д установившегося движения и времени Тв выбега. В период установившегося движения кривая угловой скорости ω = ω(t) колеблется около среднего значения ωср, что соответствует нормальной работе начального звена. На тахограмме режим установившегося движения имеет четыре цикла (время Тц). Общее время равно
Т = Тр + Ту.д + Тв, (5.1)
а время Ту.д = кТц, где к – число циклов.
Продолжительность времени Тр, Ту.д и Тв зависит от действующих сил, масс и метрических параметров механизма.
Существуют машины и механизмы, которые не имеют четко разграниченных стадий движения: грузоподъемные краны, экскаваторы и другие, где полное время движения может состоять из времени разгона и времени выбега.
Периодическое движение – это движение, при котором в течение какого-то промежутка времени механизм имеет постоянные циклы движения, причем в течение каждого цикла движение осуществляется по одному и тому же закону (см. рис. 5.1). Периодическое движение отличается еще и тем, что при любом сдвиге начала отсчета времени Тц это время постоянно. Если начало цикла отсчитывать не от точки b, а от точки е, то конец его передвинется соответственно из точки f в точку g, а bf и еg будут равны между собой.
В некоторых механизмах один цикл может соответствовать не одному, а нескольким оборотам начального звена. Так у четырехтактного двигателя внутреннего сгорания в течение цикла коленчатый вал делает два оборота.
Уравнение движения механизма
в форме закона кинетической энергии
Написав уравнение кинетической энергии применительно к механизму, можно охарактеризовать с точки зрения динамики разбег, установившееся движение и выбег.
Из закона кинетической энергии известно, что за любой промежуток времени изменение кинетической энергии равно сумме работ заданных внешних сил на соответствующем перемещении:
 (5.2)
(5.2)
где v – конечная скорость движения;
vo – начальная скорость движения;
 – кинетическая
энергия механизма.
– кинетическая
энергия механизма.
Уравнение вида
 (5.3)
(5.3)
называется уравнением движения механизма (машины).
Время разбега Тр, пуск машины в ход, характеризуется возрастанием скорости ведущего звена от нулевого до среднего значения, соответствующего нормальной рабочей скорости ведущего звена (см. рис. 5.1).
Если vо
= 0, значит
 ,
тогда уравнение принимает вид
,
тогда уравнение принимает вид
или
 ,
(5.4)
,
(5.4)
то есть за время разгона механизма происходит приращение его кинетической энергии, а физический смысл формулы (5.4) состоит в том, что в начале движения работа движущих сил расходуется на преодоление сил полезных сопротивлений, сил вредных сопротивлений и на сообщение звеньям ускорений. С целью сокращения времени разгона звенья машины не нагружают полезной работой (например, токарный станок включили, но к детали резец не подвели), и уравнение может быть записано так:
 (5.5)
(5.5)
Время пуска ограничивается достижением определенной скорости начального звена.
Время установившегося движения Ту.д характеризуется тем, что приращение кинетической энергии за цикл равно нулю. В это время скорость ведущего звена колеблется около среднего значения, соответствующего нормальной, рабочей скорости:

тогда

или
 (5.6)
(5.6)
то есть вся энергия движущих сил затрачивается на преодоление полезных и вредных сопротивлений. Чем меньше Авс, тем полезнее используется энергия механизма (машины).
Время выбега (остановки) Тв характеризуется убыванием скорости от среднего значения до нуля. Приток энергии к двигателю прекращается (он выключен). Кинетическая энергия при выбеге расходуется на преодоление сил полезных и вредных сопротивлений:
 ,
,
но следует иметь в виду, что в это время и Апс = 0 (например, сначала отводят резец от детали, затем выключают двигатель). Тогда
 .
(5.7)
.
(5.7)
Когда кинетическая энергия полностью израсходуется на преодоление сил вредных сопротивлений, механизм остановится. В практике работу сил вредных сопротивлений увеличивают искусственно, применяя тормоза, чтобы сократить время выбега.
Механический коэффициент полезного
действия механизмов и машин
За полный цикл установившегося движения работа всех движущих сил равна работе всех производственных Апс и всех непроизводственных Авс сил сопротивления (см. уравнение (5.6)).
Для определения степени совершенства машины в энергетическом отношении пользуются понятием механического коэффициента полезного действия (КПД) машины η, который представляет собой отношение абсолютной величины работы сил производственных сопротивлений Апс к работе всех движущих сил за цикл установившегося движения:
 ,
(5.8)
,
(5.8)
или
 .
(5.9)
.
(5.9)
Используя уравнение (5.6), представим формулу (5.8) в следующем виде:
 .
(5.10)
.
(5.10)
Отношение
 называется
механическим
коэффициентом потерь
и обозначается через φ. Тогда
называется
механическим
коэффициентом потерь
и обозначается через φ. Тогда
 .
(5.11)
.
(5.11)
Чем меньше в механизме работа непроизводственных сопротивлений, тем меньше его коэффициент потерь и тем совершеннее механизм в энергетическом отношении.
Коэффициент полезного действия механизма может изменяться в пределах
0 ≤ η < 1. (5.12)
Машина состоит из нескольких механизмов, поэтому определение ее КПД сводится к определению КПД каждого из механизмов. В зависимости от способа соединения этих механизмов (последовательное, параллельное или смешанное) определяют КПД всей машины.
Примером п о с л е д о в а т е л ь н о г о с о е д и н е н и я может служить теплосиловая установка, где работой движущих сил Адв является энергия топлива, работой сил полезного (производственного) сопротивления Апс – энергия, отдаваемая главным валом двигателя, а работой сил непроизводственных сопротивлений Авс – потери в топке, котле, паропроводах и т. д.
Пусть имеется n последовательно связанных между собой механизмов (рис. 5.2).

Рис. 5.2
Первый приводится в движение движущими силами, совершающими работу Адв. Так как полезная работа каждого предыдущего механизма является работой движущих сил для каждого последующего, то η1 первого механизма равен
 ,
,
второго –
 ,
,
третьего –
 ,
,
n–го –
 .
.
Общий КПД η1n равен произведению всех КПД. Имеем
 .
(5.13)
.
(5.13)
Общий КПД будет меньше действительного.
Таким образом, общий механический КПД последовательно соединенных механизмов равен произведению механических КПД отдельных механизмов, составляющих одну общую систему.
Примером п а р а л л е л ь н о г о с о е д и н е н и я может служить трансмиссионный вал вместе со станками, между которыми он распределяет энергию. Пусть имеем n станков, соединенных параллельно. Работа всех движущих сил Адв равна:
 ,
,
а работа сил полезных сопротивлений соответственно: А1́, А2́, …, Аń-1, Аń, тогда частные КПД будут:
 ;
;
 ;…;
;…;
 ;
;
 .
.
КПД всей установки равен:
 .
(5.14)
.
(5.14)
Если все частные КПД равны между собой, то КПД установки равен каждому из них. Если же они резко отличаются, то значение η можно получить, подсчитав его по формуле (5.14).
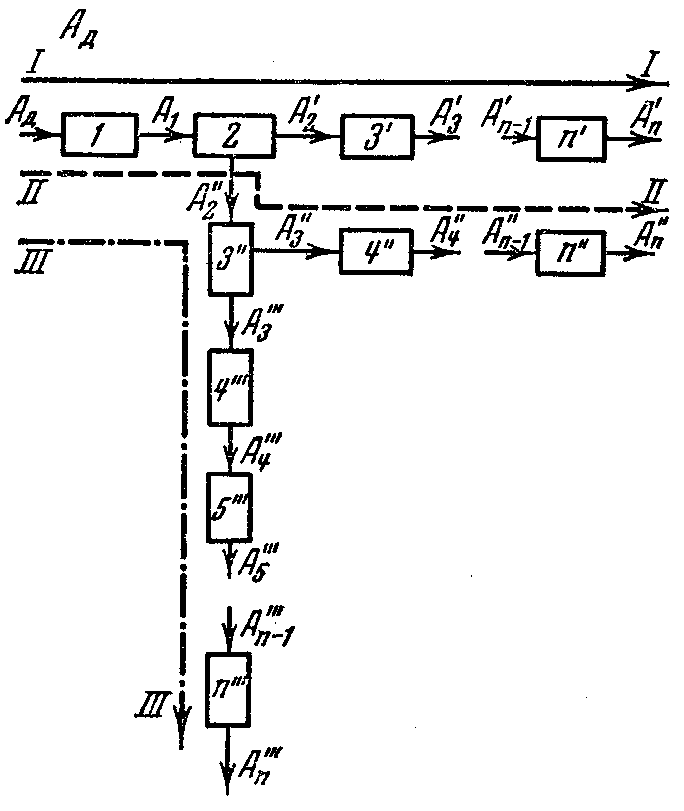
В современных машинах соединение механизмов оказывается более сложным. На рис. 5.3 показана схема сложного соединения механизмов. Поток
Рис. 5.3 |
энергии от механизма 2 идет по двум направлениям. От механизма 3" - также по двум направлениям. Общая работа сил полезных сопротивлений Апс:
Следовательно, общий КПД всей системы механизмов равен:
|
 .
. .
(5.15)
.
(5.15)
Работа Адв
может быть выражена через работы
 и через соответствующие
КПД отдельных механизмов. На рис. 5.3
показаны линиями I-I,
II-II,
III-III
три потока энергии от общего источника
энергии, производящего работу Адв,
которую можно представить суммой
и через соответствующие
КПД отдельных механизмов. На рис. 5.3
показаны линиями I-I,
II-II,
III-III
три потока энергии от общего источника
энергии, производящего работу Адв,
которую можно представить суммой
 ,
(5.16)
,
(5.16)
где
 - общие КПД каждого из потоков I-I,
II-II,
III-III,
равные
- общие КПД каждого из потоков I-I,
II-II,
III-III,
равные
 ,
,
 ,
,
 .
.
Общий КПД всей системы механизмов равен:
 .
(5.17)
.
(5.17)
Из формулы (5.17) следует, что общий КПД в значительной степени зависит от схемы распределения потоков энергии, принятой при проектировании схемы системы механизмов