

ПРОЕКТИРОВАНИЕ ПРИВОДА ДВУХЦИЛИНДРОВОГО
.pdfy r COS l 
 1 (r / l)2 SIN 2
1 (r / l)2 SIN 2
Откуда, учитывая, что перемещение ползуна |
s l r y , |
|
||||||
После преобразований получим |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
S r (1 |
1 |
COS |
( |
1 |
)2 |
SIN 2 ) |
|
|
|
|
(4.1) |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
||||
Рис 4.1
21

Где величина геометрического параметра будет rl .
Скорость точки В найдем беря производную по времени от выражения для перемещения (4.1).
V r (SIN |
SIN COS |
|
) |
|
||||
|
|
|
|
|
|
(4.2) |
||
|
|
1 |
)2 |
SIN 2 |
||||
|
|
|
|
|
||||
|
( |
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
Аналогичным образом, беря производную от (4.2), можно найти выражение для ускорения точки В. В данном проекте при силовом расчете механизма инерционные силы и моменты не учитываются. Поэтому выражение для ускорения точки В не приводится.
Таким образом, применение аналитических методов анализа (синтеза)
плоских механизмов позволяет выводить аналитические зависимости кинематических параметров звеньев и характерных точек механизма.
4.3 Аналог скорости
Как видно из выражения (4.2) кинематические параметры ведомого звена зависят от скорости ведущего. Для удобства анализа работы механизма скорость ведомого звена удобно выражать в функции обобщенных координат ведущего звена, в качестве которых выбираются либо угол поворота , либо перемещение S ведущего звена. Такое выражение называется аналогом
скорости.
Так как аналог скорости зависит только от обобщенных координат и не зависят от времени кинематическое исследование механизма можно вести чисто геометрическим методом.
Для рассмотренного выше примера расчета КПМ аналогами скорости я
ползуна, как следует из выражений (4.2), очевидно будут:
22

S ' r (SIN |
|
SIN COS |
|
) |
|
|||
|
|
|
|
|
|
(4.3) |
||
|
||||||||
|
|
|
1 |
)2 |
SIN 2 |
|||
|
( |
|
||||||
|
|
|
||||||
|
|
|
||||||
Чтобы наглядно представить характер изменения функций положения и функций аналога скорости строят их графики.
4.4.Построение графиков функции перемещения,
ианалога скорости
Построение графиков функций целесообразно производить на
компьютере с помощью программы ''EXCEL”. Используя эту же программу можно оформить таблицы результатов расчетов этих величин, а также построить соответствующие графики.
Условимся координату S1 ( ) считать положительной. Расчеты S1 ( )
производят за полный оборот кривошипа с интервалом φ = 15о. Для построения графика функции перемещения для второго ползуна S2 ( ) , в
формуле (4.6) угол заменяют на ( 2 ) .
Результаты расчетов по формулам (4.1) и (4.2) сводятся в таблицу.
таблица 4.1
Расчет кинематических параметров ползунов КПМ
град |
рад |
S1 (м) |
S2 (м) |
S'1 (м) |
S'2 (м) |
S"1 (м) |
S"2 (м) |
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0,031263 |
0 |
-0,02842 |
0,034105 |
-0,00568 |
15 |
0,261799 |
0,00115878 |
0,023716 |
0,008777 |
-0,02887 |
0,032375 |
0,002433 |
30 |
0,523599 |
0,00451813 |
0,016342 |
0,016672 |
-0,02707 |
0,027455 |
0,011368 |
45 |
0,785398 |
0,00974518 |
0,009745 |
0,022938 |
-0,02294 |
0,020096 |
0,020096 |
60 |
1,047198 |
0,01634176 |
0,004518 |
0,027074 |
-0,01667 |
0,011368 |
0,027455 |
75 |
1,308997 |
0,02371637 |
0,001159 |
0,028873 |
-0,00878 |
0,002433 |
0,032375 |
|
|
|
|
23 |
|
|
|
90 |
1,570796 |
0,03126251 |
2,3E-13 |
0,02842 |
-1,3E-07 |
-0,00568 |
0,034105 |
105 |
1,832596 |
0,03842788 |
0,001159 |
0,026031 |
0,008777 |
-0,01228 |
0,032375 |
120 |
2,094395 |
0,04476222 |
0,004518 |
0,022152 |
0,016671 |
-0,01705 |
0,027455 |
135 |
2,356194 |
0,04993778 |
0,009745 |
0,017254 |
0,022938 |
-0,0201 |
0,020096 |
150 |
2,617994 |
0,05374381 |
0,016342 |
0,011749 |
0,027074 |
-0,02177 |
0,011368 |
165 |
2,879793 |
0,0560629 |
0,023716 |
0,005935 |
0,028873 |
-0,02253 |
0,002433 |
180 |
3,141593 |
0,05684092 |
0,031262 |
2,79E-18 |
0,02842 |
-0,02274 |
-0,00568 |
195 |
3,403392 |
0,0560629 |
0,038428 |
-0,00593 |
0,026031 |
-0,02253 |
-0,01228 |
210 |
3,665191 |
0,05374381 |
0,044762 |
-0,01175 |
0,022152 |
-0,02177 |
-0,01705 |
225 |
3,926991 |
0,04993778 |
0,049938 |
-0,01725 |
0,017254 |
-0,0201 |
-0,0201 |
240 |
4,18879 |
0,04476222 |
0,053744 |
-0,02215 |
0,011749 |
-0,01705 |
-0,02177 |
255 |
4,45059 |
0,03842788 |
0,056063 |
-0,02603 |
0,005935 |
-0,01228 |
-0,02253 |
270 |
4,712389 |
0,03126251 |
0,056841 |
-0,02842 |
8,35E-08 |
-0,00568 |
-0,02274 |
285 |
4,974188 |
0,02371637 |
0,056063 |
-0,02887 |
-0,00593 |
0,002433 |
-0,02253 |
300 |
5,235988 |
0,01634176 |
0,053744 |
-0,02707 |
-0,01175 |
0,011368 |
-0,02177 |
315 |
5,497787 |
0,00974518 |
0,049938 |
-0,02294 |
-0,01725 |
0,020096 |
-0,0201 |
330 |
5,759587 |
0,00451813 |
0,044762 |
-0,01667 |
-0,02215 |
0,027455 |
-0,01705 |
345 |
6,021386 |
0,00115878 |
0,038428 |
-0,00878 |
-0,02603 |
0,032375 |
-0,01228 |
360 |
6,283185 |
1,7064E-34 |
0,031263 |
-8,4E-18 |
-0,02842 |
0,034105 |
-0,00568 |
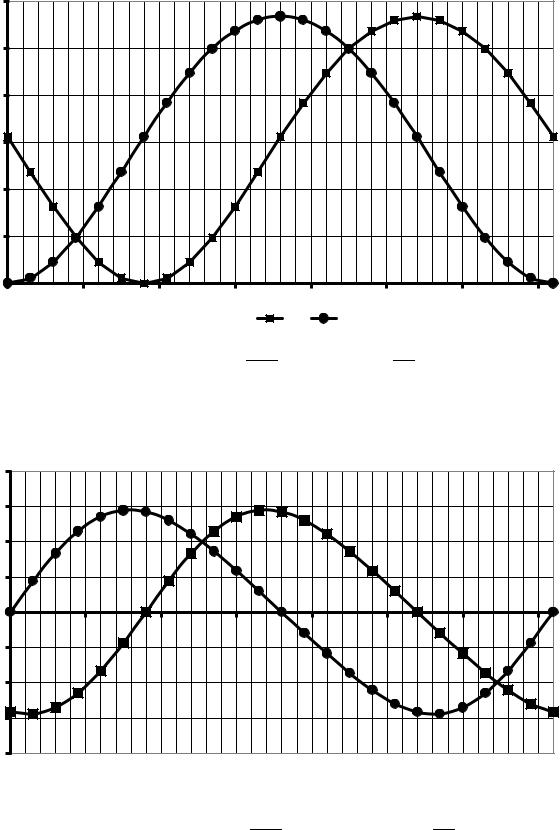
По данным (таблицы 4.1 ) с помощью той же программы строим графики
соответствующих зависимостей рис 4.2, 4.3,4.4
24
S(м) |
|
|
перемещени ползуна |
|
|
|||
|
|
|
|
|
|
|
|
|
0,06 |
|
|
|
|
|
|
|
|
0,05 |
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
0,01 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
|
|
|
|
|
s2 |
S1 |
|
|
угол (град) |
|
|
|
|
|
|
|
||
|
Рис.4.2 ( = 1,36 град; = 0,053 |
м ) |
|
|
||||
|
|
|
|
мм |
|
мм |
|
|
S' (м) |
|
|
аналог скорости |
|
|
|
||
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
0,01 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
угол (град) |
|
|
|
|
|
|
|
|
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
-0,01 |
|
|
|
|
|
|
|
-0,02 |
|
|
|
|
|
|
|
-0,03
-0,04

 S'2
S'2  S'1
S'1
Рис.4.3 ( = 1,622 градмм ; ′ = 0,00034 ммм )
25
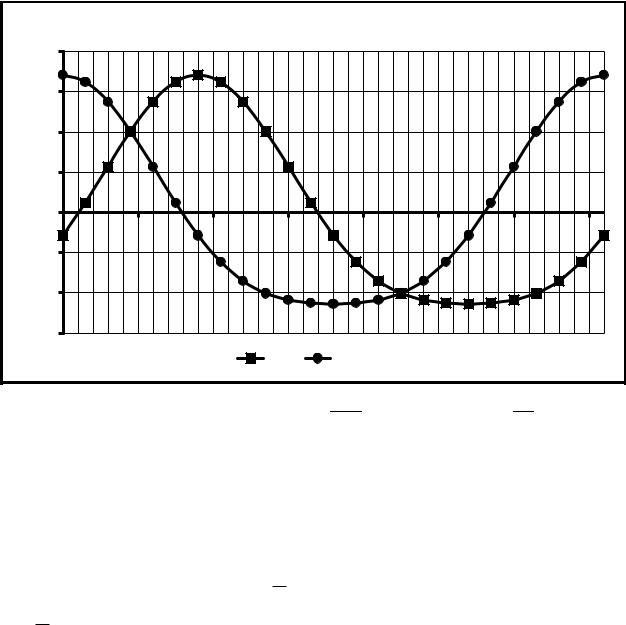
S" (м) |
|
|
аналог ускорений |
|
|
|
||
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
0,01 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
угол (град) |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
|
-0,01 |
|
|
|
|
|
|
|
|
-0,02 |
|
|
|
|
|
|
|
|
-0,03 |
|
|
|
|
|
|
|
|
|
|
|
S"2 |
S"1 |
|
|
|
|
|
|
Рис.4.4 ( = 1,572 |
град ; " = 0,00034 |
м ) |
|
|||
|
|
|
|
мм |
|
|
мм |
|
Для построения графика вычисляются масштабные коэффициенты:
Масштабный коэффициент для угла поворота равного 2
μ 2π ,[ рад ] ,мм
где - отрезок в мм, соответствующий этому углу поворота. (Черта над величиной говорит о чертежном значение этой величины)
Масштабный коэффициент для перемещения ползунов
μs |
2r |
,[ |
м |
] |
|
ys |
|
мм |
, |
|
|
|
где 2r – максимально значение хода поршня
ys - отрезок в мм, соответствующий максимальной величине хода поршня.
Масштабный коэффициент для аналога скорости
26
s' |
S ' |
|
|
м |
|
max |
, |
|
, |
||
|
|
||||
|
y |
' |
|
мм |
|
|
s |
|
|
|
|
где Smx' - максимальное значение величины аналога скорости,
ys' - отрезок в мм, соответствующий максимальной величине аналога скорости.
5 ОПРЕДЕЛЕНИЕ СУММАРНОГО ПРИВЕДЕННОГО
МОМЕНТА СИЛ.
Приведенный момент сил определяется из равенства мгновенной мощности звена приведения и суммы мгновенных мощностей сил,
действующих на поршни механизма.
За звено приведения выбран кривошип насоса, вращающийся относительно неподвижной оси со скоростью ωкр = const.
Пренебрегая силами трения и силами тяжести звеньев, приведенный момент сил Тпр звена приведения определяется из равенства:
|
|
Т прω F V ( ) F V ( ) |
|||||
|
|
|
кр |
B |
B |
B |
B |
|
|
VB |
SB |
|
|
|
|
или поскольку |
|
ωкр |
|
– аналог скорости точки В |
|||
|
|
|
|
|
|
|
|
|
Т пр F S |
F S |
|
Т пр Т пр |
|||
|
|
|
B 1 |
B |
2 |
1 |
2 |
где S' – аналоги скорости точки В поршня 3 и точки В' поршня 5 |
|||||||
заимствуются |
из результатов кинематического анализа механизма насоса |
||||||
(п.4). |
|
|
|
|
|
|
|
В курсовом проекте задана не сила FB, а среднее удельное давление на поршень pср, МПа предполагается постоянной. Поэтому, значение силы при известном диаметре поршня определяется из равенства:
27
F p |
πdП2 |
03 |
0,152. |
106 5301Н |
|
||||
B ср |
4 |
4 |
|
|
|
|
|||
В насосе двухстороннего действия оба хода поршня являются рабочими.
Это означает, что при движении поршня вниз в рабочем цилиндре по одну сторону поршня происходит всасывание жидкости, по другую – нагнетание, а при его движении вверх стороны меняются ролями.
Вследствие этого на поршень постоянно действует сила давления жидкости, направленная против его движения, причем поскольку pср = const, то FB =const в любом положении.
Результаты расчетов сводят в таблицу.
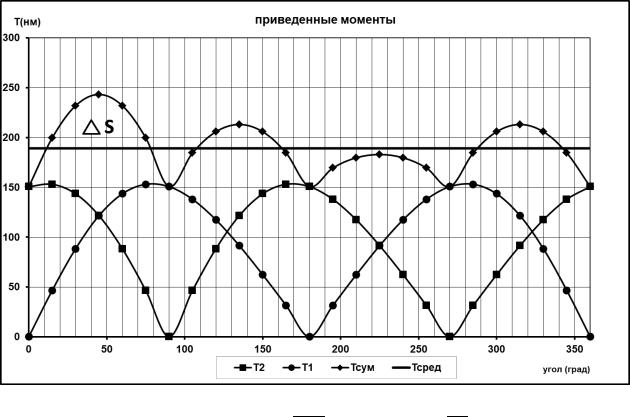
таблица 5.1 Приведенные моменты
град |
Т1 |
T2 |
Tсум |
Тсред |
Тизбыт |
0 |
0 |
150,669532 |
150,6695 |
189,1388 |
-38,4692 |
15 |
46,52966 |
153,069229 |
199,5989 |
189,1388 |
10,46013 |
30 |
88,3832 |
143,532333 |
231,9155 |
189,1388 |
42,77677 |
45 |
121,6065 |
121,606882 |
243,2134 |
189,1388 |
54,07462 |
60 |
143,5321 |
88,3837299 |
231,9158 |
189,1388 |
42,77709 |
75 |
153,0692 |
46,5302857 |
199,5995 |
189,1388 |
10,46071 |
90 |
150,6696 |
0,00066413 |
150,6703 |
189,1388 |
-38,4684 |
105 |
138,0022 |
46,5290248 |
184,5312 |
189,1388 |
-4,60751 |
120 |
117,4354 |
88,3826606 |
205,818 |
189,1388 |
16,67927 |
135 |
91,47256 |
121,606099 |
213,0787 |
189,1388 |
23,93991 |
150 |
62,28645 |
143,531891 |
205,8183 |
189,1388 |
16,67958 |
165 |
31,46269 |
153,069134 |
184,5318 |
189,1388 |
-4,60693 |
180 |
1,48E-14 |
150,669754 |
150,6698 |
189,1388 |
-38,469 |
195 |
31,46269 |
138,002456 |
169,4651 |
189,1388 |
-19,6736 |
210 |
62,28645 |
117,435697 |
179,7221 |
189,1388 |
-9,41661 |
225 |
91,47256 |
91,4729532 |
182,9455 |
189,1388 |
-6,19324 |
240 |
117,4354 |
62,2868715 |
179,7222 |
189,1388 |
-9,41652 |
255 |
138,0022 |
31,4631297 |
169,4653 |
189,1388 |
-19,6734 |
270 |
150,6696 |
0,00044275 |
150,6701 |
189,1388 |
-38,4687 |
285 |
153,0692 |
31,4622522 |
184,5314 |
189,1388 |
-4,60732 |
300 |
143,5321 |
62,2860236 |
205,8181 |
189,1388 |
16,67938 |
|
|
|
28 |
|
|
315 |
121,6065 |
91,4721706 |
213,0787 |
189,1388 |
23,93991 |
330 |
88,3832 |
117,435032 |
205,8182 |
189,1388 |
16,67947 |
345 |
46,52966 |
138,001978 |
184,5316 |
189,1388 |
-4,60712 |
360 |
4,43E-14 |
150,669532 |
150,6695 |
189,1388 |
-38,4692 |
ср = 189,1Нм
По результатам расчетов строят графики T1пр ( ),T2пр ( ),T пр ( ),Tсрпр ( ). (Рис.5.1)
Рис.5.1 ( = 1,579 градмм ; Т = 2,439 Нммм)
Для этого графика определяют масштабный коэффициент
T |
|
Tсрпр |
|
нм |
|
|
, |
|
, |
||
yср |
|
||||
|
|
|
мм |
||
где Tсрпр - среднее значение суммарного приведенного момента,
yср - отрезок в мм, соответствующий этому значению на графике.
29
5.1 Выбор электродвигателя привода насоса и расчет
параметров редуктора
Требуемую мощность двигателя определяют по формуле
P'эд |
|
Т пр |
ω |
|
|
ср |
кр |
, кВт, |
(5.1) |
||
|
|
|
|
||
η
где η – КПД машинного агрегата,
Tсрпр – суммарный приведенный момент внешних сил, приложенных к звеньям механизма.
КПД машинного агрегата при последовательном соединении его элементов
(рис 1.2) определяют по формуле:
η η12 η2 η3 ,
где η1 - 0,98…0,99 – КПД соединительной муфты; (при их отсутствии 1 1
) (принимаем 1=0,9)
η3 - 0,8…0,9 – КПД двухпоршневого насоса двухстороннего действия;
(принимаем 3 = 0,85);
η2 - КПД цилиндрического одноступенчатого редуктора определяется по формуле:
η2 =1 – [(φ3 + φ2) + mпψп],
где (φ3 + φ2)=0,02…0,05 – сумма коэффициентов потерь в зубчатой передачи и гидравлических потерь на перемешивание масла в картере редуктора (принимаем ( 3 + 2)=0,03);
ψп 0,005...0,01 - коэффициент потерь в одной паре подшипников.
(принимаем п = 0,008);
п = 2 – число пар подшипников.
Тогда 3 = 1 − (0,03 + 2 ∙ 0,008) = 0,81; а =0,55.
30